当前位置:网站首页>Problems encountered in installing Yolo3 target detection module in Autoware
Problems encountered in installing Yolo3 target detection module in Autoware
2022-08-05 06:18:00 【cql_cqu】
"The predecessors planted the trees, and the later generations enjoyed the shade!" The problems encountered in the experiment were summarized on the basis of other netizens, so thanks to the bloggers who provided help!
Written in the front: Since I am doing target detection based on the fusion of camera and lidar information, I use the Autoware framework for experiments, and install the Autoware open source software framework in the early stage. The specific installation steps are listed by many netizens in the blog.To repeat, the installation tutorial is recommended: https://blog.csdn.net/yourgreatfather/article/details/86504547
I installed it successfully under the tutorial of this netizen.
Problem description: Since Autoware->Computing integrates YOLO3 related packages, as shown below.
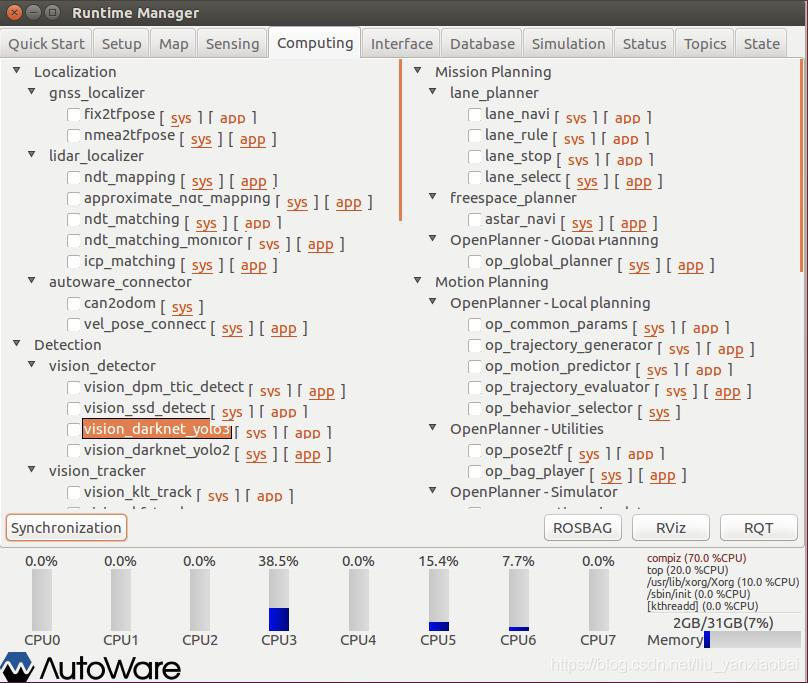
So to install YOLO3 in Autoware, you only need to create a new data folder in the corresponding vision_darknet_detect/darknet/ directory, and then download the weight model trained by YOLO to the data folder.The command is as follows:
cd datawget https://pjreddie.com/media/files/yolov3.weightswget https://pjreddie.com/media/files/yolov2.weightsRun YOLO3 detection:
roslaunch vision_darknet_detect vision_yolo3_detect.launchThere is a problem after running: Error:cannot launch type of node[vision_darknet_detect/]...
Problem solution 1: Reference: https://blog.csdn.net/banzhuan133/article/details/78177676
Solution 2: There may be a package vision_darknet_detect with the same name, use the following command:
catkin_find --without-underlays --libexec --share vision_darknet_detectCheck if there is a package with the same name. After the query, there are two packages with the same name in different paths. Just delete the package under the path where YOLO3 is not installed.
The two vision_darknet_detect paths in my computer are: /home/yyl/Autoware-master/ros/devel/share/vision_darknet_detect and /home/yyl/Autoware-master/ros/src/computing/perception/detection/vision_detector/packages/vision_darknet_detect
After I delete vision_darknet_detect in the first path, I can run YOLO3, and the test results under Autoware->Computing can also display the real-time detected objects.
边栏推荐
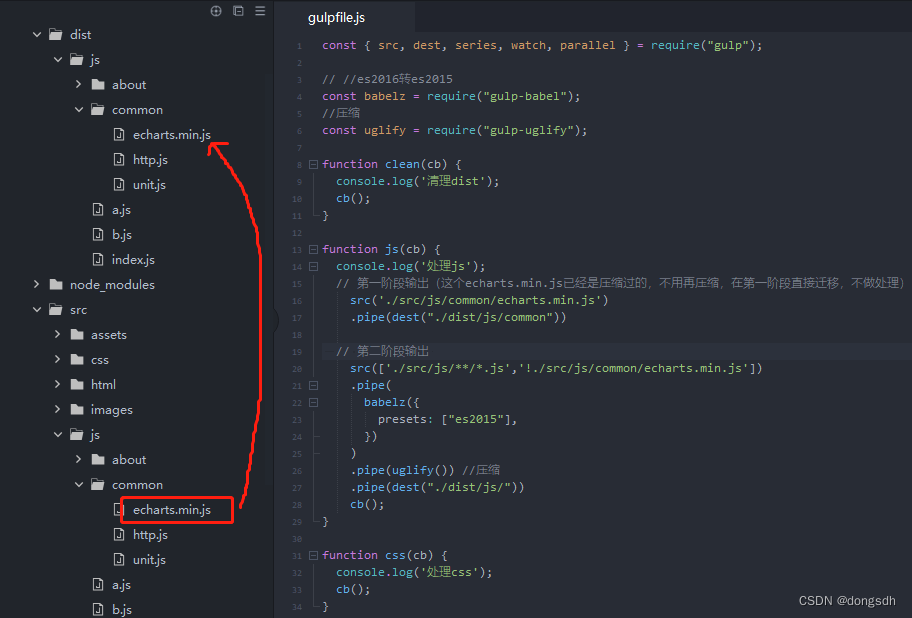
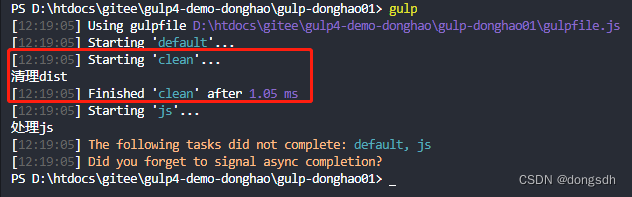
- Getting Started 04 When a task depends on another task, it needs to be executed in sequence
- 微信小程序页面跳转传参
- [Day6] File system permission management, file special permissions, hidden attributes
- spark source code - task submission process - 2-YarnClusterApplication
- Unity realizes first-person roaming (nanny-level tutorial)
- 正则表达式小实例--去掉字符串中间和两边的空格
- 千亿IT运维市场,产品要凭实力说话
- I/O performance and reliability
- What impact does CIPU have on the cloud computing industry?
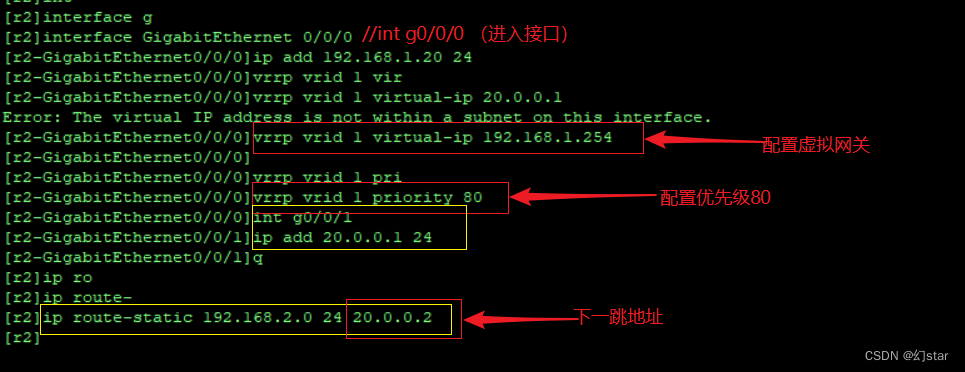
- VRRP概述及实验
猜你喜欢



随机推荐
通过反射获取Class对象的四种方式
从“双卡双待“到”双通“,vivo率先推动DSDA架构落地
Switch principle
Introductory document 05-2 use return instructions the current task has been completed
监控系统的内卷,有什么讲究?
交换机原理
NIO works is analysed
Configuration of TensorFlow ObjecDetectionAPI under Anaconda3 of win10 system
Spark source code-task submission process-6.2-sparkContext initialization-TaskScheduler task scheduler
The spark operator - coalesce operator
VLAN详解及实验
运维工程师,快来薅羊毛
lvm逻辑卷及磁盘配额
单臂路由与三成交换机
idea 常用快捷键
618, you may be able to wake up a little bit
The Servlet to jump to the JSP page, forwarding and redirection
深度 Zabbix 使用指南——来自惨绿少年
618,你也许可以清醒亿点点
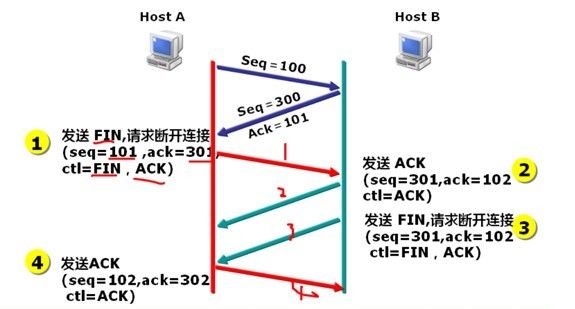
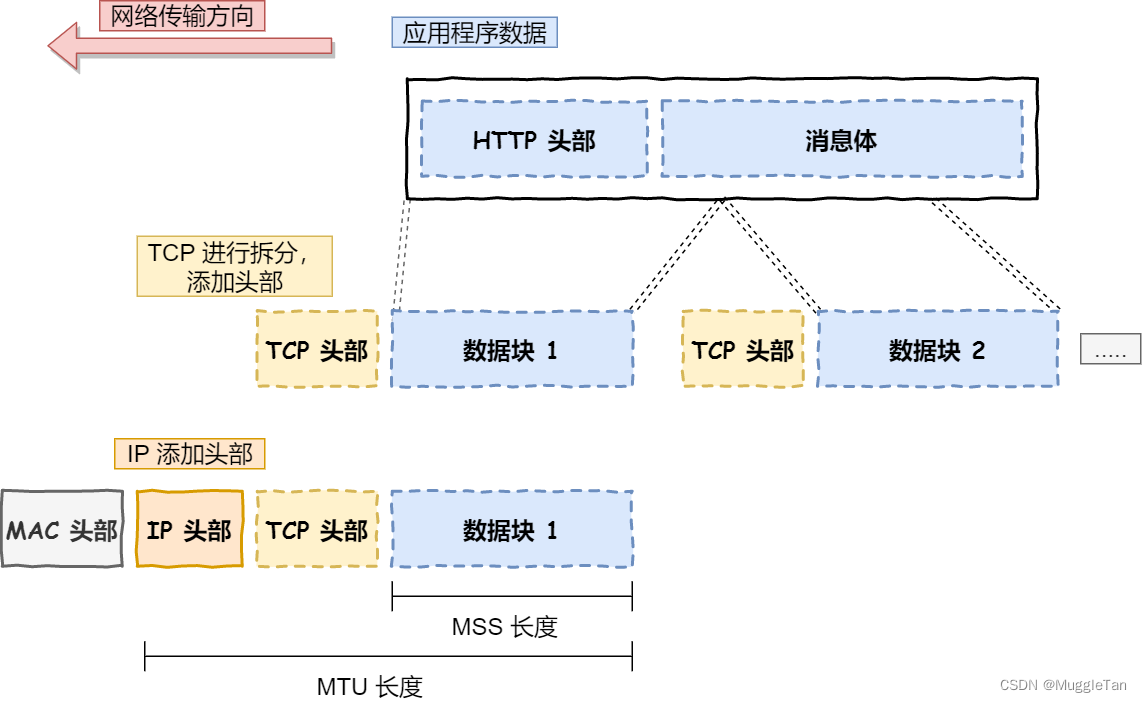
传输层协议(TCP3次握手)