当前位置:网站首页>Pointnet++学习
Pointnet++学习
2022-07-05 05:16:00 【马少爷】
1、点云的归一化与反归一化
归一化的作用:
数据归一化后,最优解的寻优过程明显会变得平缓,更容易正确的收敛到最优解
def pc_normalize(pc):
"""
对点云数据进行归一化
:param pc: 需要归一化的点云数据
:return: 归一化后的点云数据
"""
# 求质心,也就是一个平移量,实际上就是求均值
centroid = np.mean(pc, axis=0)
pc = pc - centroid
m = np.max(np.sqrt(np.sum(pc ** 2, axis=1)))
# 对点云进行缩放
pc = pc / m
return pc
def np.mean(a, axis=None, dtype=None, out=None, keepdims=np._NoValue, *,
where=np._NoValue):
"""
沿指定轴计算算术平均值
Parameters:
a:需要计算的点云数据
axis:指定轴
axis=0:对a数组的每列求平均值
axis=1:对a数组的每行求平均值
"""
点云的反归一化:
由于点云的归一化操作,会使得PointNet预测的结果比原始点云尺寸不同,为了恢复原始大小,可以将预测得到的点云进行反归一化,即使得到的点云乘上缩放尺寸m,再加上平移尺寸centroid。
ret = pred × m + centroid
2、os.path.join()函数
os.path.join() 函数用于路径拼接文件路径,可以传入多个参数。
3、Python rstrip()方法
Python rstrip() 删除 string 字符串末尾的指定字符,默认为空白符,包括空格、换行符、回车符、制表符。
4、如何进行sample(采样) ?
PointNet++较PointNet的主要改进是引入了局部特征的思想: 将整个大点云P分成有overlap的小点云,分别利用PointNet对小点云进行特征提取。Sample(采样的目的)就是选出上述小点云的代表点(中心点),这里实现的方式采用的FPS(fathest point sampling):
a. 有两个集合A = {}, B = P
b. 随机选择B中一个点x加入A, 并从B中删除点x
c. 计算B中每个点z到A中所有点的距离得到z_1, z_2, …, z_len(A), 选择min(z_1, z_2, …, z_len(A)记为点z到集合A的距离;
d. 从B中选择距离集合A最远的点y, 加入到集合A,并从B删除点y.
e. 重复c, d直到集合A中点的数量满足预先设定的阈值.
是不是和图论里的Dijkstra算法很类似,只不过Dijkstra算法求的是最短距离。下面用一张二维图更直观的表示sample的目的: 左图表示输入点,右图表示使用FPS算法采样得到的中心点(红色倒三角形)。这些中心点将用于接下来的group操作。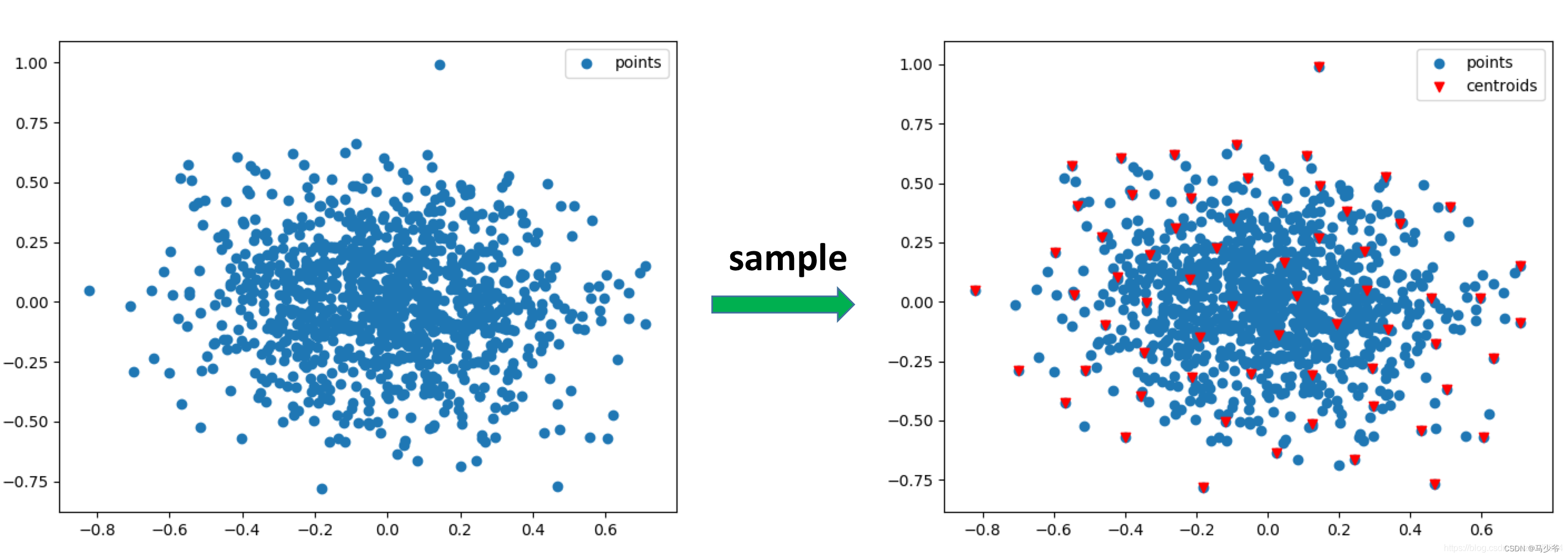
sample的代码(fps算法)的代码如下, 部分是采用的向量化实现,而且在实现的时候有些技巧性;建议首先自己思考一下如何用代码实现上述fps算法:
input和output分别是什么 ? Input: 点集xyz shape=(B, N, 3), 中心点的数量M; Output: M个中心点的坐标或索引centroids, shape=(B, M, 3)或(B, M). 代码中返回的是索引值。
如果不用for循环进行比较距离, 又该如何实现 ? 如果感觉不是很好写,看看下面的代码实现吧。
如何实现点集中的点-点距离的向量化计算 ? 这里实现时遇到了一个坑, 当dist=0时,有可能会出现1e-8之类很小的值,但开根号也没有报错,所以比较好的方式是使用平方距离,或者使用torch.where过滤一下距离等于0的值。
def get_dists(points1, points2):
'''
Calculate dists between two group points
:param cur_point: shape=(B, M, C)
:param points: shape=(B, N, C)
:return:
'''
B, M, C = points1.shape
_, N, _ = points2.shape
dists = torch.sum(torch.pow(points1, 2), dim=-1).view(B, M, 1) + \
torch.sum(torch.pow(points2, 2), dim=-1).view(B, 1, N)
dists -= 2 * torch.matmul(points1, points2.permute(0, 2, 1))
dists = torch.where(dists < 0, torch.ones_like(dists) * 1e-7, dists) # Very Important for dist = 0.
return torch.sqrt(dists).float()
def fps(xyz, M):
'''
Sample M points from points according to farthest point sampling (FPS) algorithm.
:param xyz: shape=(B, N, 3)
:return: inds: shape=(B, M)
'''
device = xyz.device
B, N, C = xyz.shape
centroids = torch.zeros(size=(B, M), dtype=torch.long).to(device)
dists = torch.ones(B, N).to(device) * 1e5
inds = torch.randint(0, N, size=(B, ), dtype=torch.long).to(device)
batchlists = torch.arange(0, B, dtype=torch.long).to(device)
for i in range(M):
centroids[:, i] = inds
cur_point = xyz[batchlists, inds, :] # (B, 3)
cur_dist = torch.squeeze(get_dists(torch.unsqueeze(cur_point, 1), xyz))
dists[cur_dist < dists] = cur_dist[cur_dist < dists]
inds = torch.max(dists, dim=1)[1]
return centroids
5、如何进行group ?
经过sample操作,我们已经得到了点云P中M个中心点,group的操作就是以每个中心点centroid为圆心,人工设定半径r,每个圆内部的点作为一个局部区域,再利用接下来的PointNet提取特征。这里需要注意的是,为了方便batch操作,每一个局部区域内的点的数量是一致的,都为K,如果某个圆内的点的数量小于K, 则可以重复采样圆内的点,达到数量K;如果某个区域内的点的数量大于K, 则随机选择K个点,即可。group操作得到的结果如下图所示,可以形成很多小的局部区域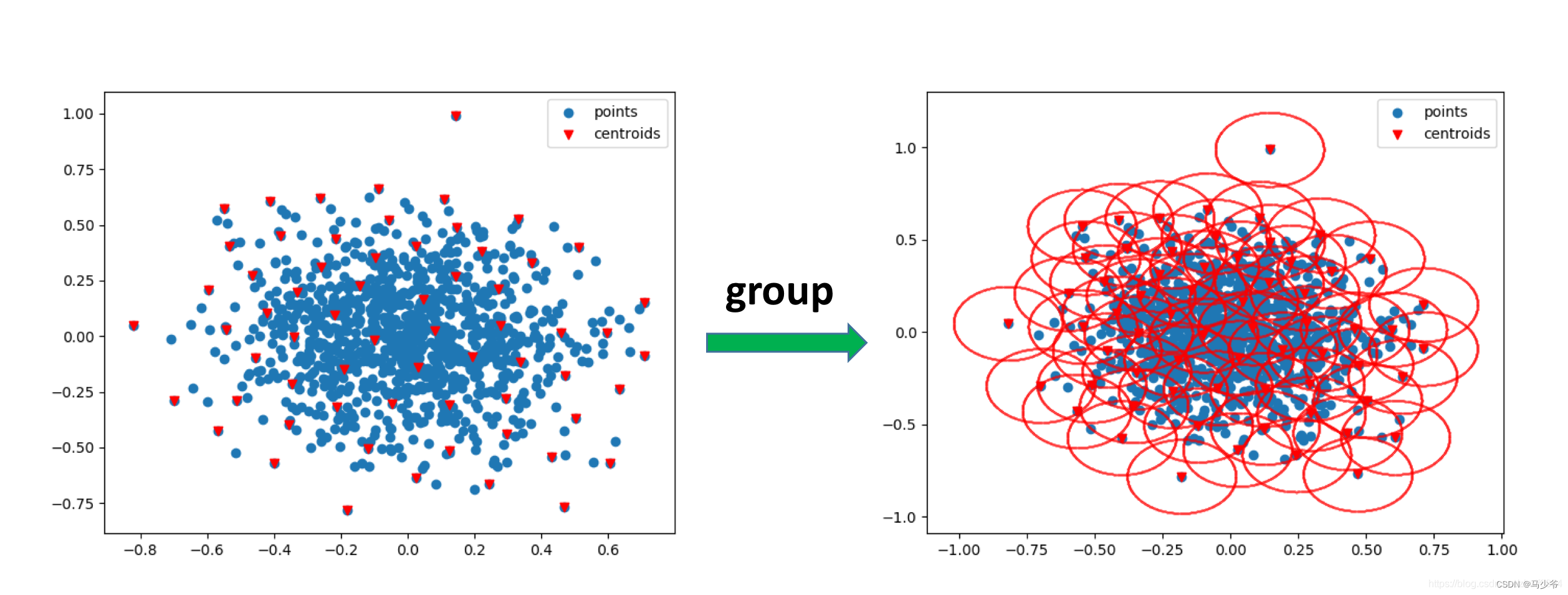
Group的代码该怎么写呢? 首先得先考虑清楚一下问题:
group的输入和输出是什么? 输入: 完整点云(B, N, 3), 中心点(B, M), 半径r, 前面提到的数量K; 输出: 很多个局部小点云(B, M, K, 3)或其索引(B, M, K),下面代码中返回的是索引值, shape为(B, M, K)
难点在于向量化实现选择K个点: 在圆内大于K和小于K时是如何操作的。
具体代码参考如下:
def gather_points(points, inds):
'''
:param points: shape=(B, N, C)
:param inds: shape=(B, M) or shape=(B, M, K)
:return: sampling points: shape=(B, M, C) or shape=(B, M, K, C)
'''
device = points.device
B, N, C = points.shape
inds_shape = list(inds.shape)
inds_shape[1:] = [1] * len(inds_shape[1:])
repeat_shape = list(inds.shape)
repeat_shape[0] = 1
batchlists = torch.arange(0, B, dtype=torch.long).to(device).reshape(inds_shape).repeat(repeat_shape)
return points[batchlists, inds, :]
def ball_query(xyz, new_xyz, radius, K):
'''
:param xyz: shape=(B, N, 3)
:param new_xyz: shape=(B, M, 3)
:param radius: int
:param K: int, an upper limit samples
:return: shape=(B, M, K)
'''
device = xyz.device
B, N, C = xyz.shape
M = new_xyz.shape[1]
grouped_inds = torch.arange(0, N, dtype=torch.long).to(device).view(1, 1, N).repeat(B, M, 1)
dists = get_dists(new_xyz, xyz)
grouped_inds[dists > radius] = N
grouped_inds = torch.sort(grouped_inds, dim=-1)[0][:, :, :K]
grouped_min_inds = grouped_inds[:, :, 0:1].repeat(1, 1, K)
grouped_inds[grouped_inds == N] = grouped_min_inds[grouped_inds == N]
return grouped_inds
6、Pointnet如何提取特征 ?
经过了sample和group操作,整个大点云被分成了很多个有overlap的小点云, 整个完整点云可表示为shape=(B, M, K, C0)的tensor, M表示中心点的数量, K表示每个中心点的球邻域内选择的点的数量, C0是特征维度, 初始输入点位C0=3或C0=6(加上normal信息)。接下来就是利用PointNet对每个小点云P’(shape=(K, C0))进行特征提取。对小点云P’中的每个点连续进行 1d卷积 + bn + relu 操作,学习每个点的特征, 最后在K通道上进行最大值和平均值池化,得到当前小点云的特征F(shape=(C, )), 这里实现时并没有直接用nn.Conv1d,而是使用了nn.Conv2d, kernel size=1, 本质应该是一样的。每个小点云P’(K, C0)经过PointNet得到特征F(C, ), 那么一个batch的数据(shape=(B, M, K, C0)), 经过PointNet模块后, 将会得到维度为(B, M, C)的特征. 这部分代码比较简洁,就是PyTorch的常规操作,部分代码如下:
self.backbone = nn.Sequential()
for i, out_channels in enumerate(mlp):
self.backbone.add_module('Conv{}'.format(i),
nn.Conv2d(in_channels, out_channels, 1,
stride=1, padding=0, bias=False))
if bn:
self.backbone.add_module('Bn{}'.format(i),
nn.BatchNorm2d(out_channels))
self.backbone.add_module('Relu{}'.format(i), nn.ReLU())
in_channels = out_channels
上面就是一次set abstraction操作了. PointNet++是有3次set abstraction操作的:
第一次: (B, N, C0) -> (B, M1, C1) , C0 = 3 或 C0=6(加上normal信息)
第二次: (B, M1, C1+3) -> (B, M2, C2)
第三次: (B, M2, C2+3) -> (B, C3)
这里有一个细节问题, 可以看到C1和C2后面都加了3, 这是在学到特征的基础上又加了位置信息(x, y, z), 重新作为新的特征来送入PointNet网络。
7、分类任务在提取特征后是怎么操作的,loss是什么?
在提取了每个点云的特征(C3, )之后, 接下来就和图像里的分类任务一样了,C3维的特征作为输入,然后通过通过两个全连接层和一个分类层(分类层的是输出节点等于类别数的全连接层),输出每一类的概率。
损失函数采用的是交叉熵损失函数,对应PyTorch中的nn.CrossEntropy().
8、分割任务中如何进行上采样, loss是什么?
分割任务需要对点云P中的每个点进行分类,而PointNet++中的set abstraction由于sampling操作减少了输入点云P中的点的数量,如何进行上采样使点云数量恢复输入时的点云数量呢?
在图像分割任务中,为了恢复图像的分辨率, 往往采用反卷积或者插值的方式来操作呢, 在点云中该如何恢复点云的数量呢?
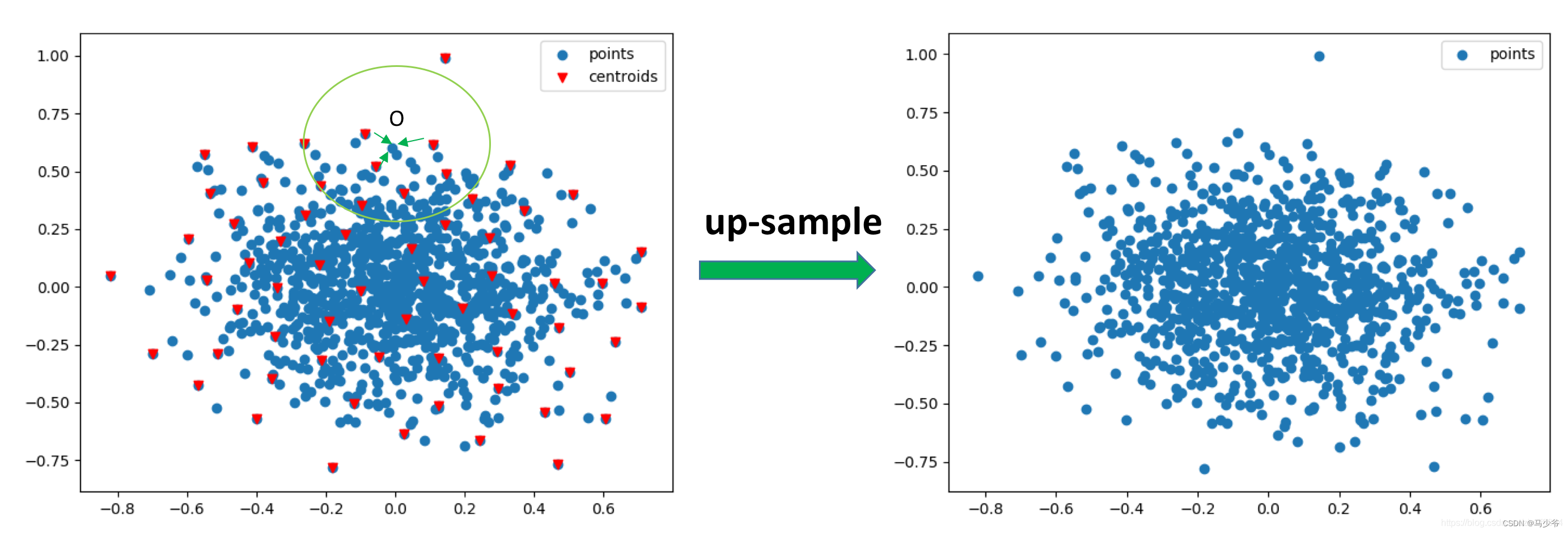
其实,在PointNet++中的set abstraction模块里,当前点云Q和下采样后的点云Q’的中的点位置信息一直是保存的,点云的上采样就是利用了这一特性。这里利用二维图直观的解释一下,下方左图中红色的倒三角形表示下采样后的点云Q’, 蓝色的点云表示下采样之前的点云Q, 点云里的上采样就是用PointNet学习后的点云Q’的特征表示下采样之前点云Q的特征。采用的方式是k近邻算法,论文中k=3。如图所示,对于Q中的每一个点O,在Q’中寻找其最近的k个点,基于距离加权(距离O近,其权重大; 距离O远, 其权重大)求和这k个点的特征来表示点O的特征,具体计算方式为:
上采样得到了C’维的特征, 而且点的数量已经恢复到了下采样之前的数量; 将C’维的特征与set abstraction中相同点数量的点云(对称位置)特征(C维)进行进行concat操作,进而进行多个 Conv1d + Bn + ReLU操作,来得到新的特征。
经过三次上采样操作后,点云恢复了初始输入点云中点的数量, 再经过一次conv1d + bn + relu层 和一个对点的分类层,最终得到对每个点的分类。
上采样部分的PyTorch实现代码如下:
def three_nn(xyz1, xyz2):
'''
:param xyz1: shape=(B, N1, 3)
:param xyz2: shape=(B, N2, 3)
:return: dists: shape=(B, N1, 3), inds: shape=(B, N1, 3)
'''
dists = get_dists(xyz1, xyz2)
dists, inds = torch.sort(dists, dim=-1)
dists, inds = dists[:, :, :3], inds[:, :, :3]
return dists, inds
def three_interpolate(xyz1, xyz2, points2):
'''
:param xyz1: shape=(B, N1, 3)
:param xyz2: shape=(B, N2, 3)
:param points2: shape=(B, N2, C2)
:return: interpolated_points: shape=(B, N1, C2)
'''
_, _, C2 = points2.shape
dists, inds = three_nn(xyz1, xyz2)
inversed_dists = 1.0 / (dists + 1e-8)
weight = inversed_dists / torch.sum(inversed_dists, dim=-1, keepdim=True) # shape=(B, N1, 3)
weight = torch.unsqueeze(weight, -1).repeat(1, 1, 1, C2)
interpolated_points = gather_points(points2, inds) # shape=(B, N1, 3, C2)
interpolated_points = torch.sum(weight * interpolated_points, dim=2)
return interpolated_points
9、以tensor解析PointNet++网络中维度和尺寸是怎么变化的 ?
骨干网络:
Input data(B, N, 6) -> Set Abstraction[sample(B, 512, 3) -> group(B, 512, 32, 6) -> PointNet(B, 512, 32, 128) -> Pooling(B, 512, 128)] -> Set Abstraction[sample(B, 128, 3) -> group(B, 128, 64, 128 + 3) -> PointNet(B, 128, 64, 256) -> Pooling(B, 128, 256) ] -> Set Abstraction[sample(B, 1, 3) -> group(B, 1, 128, 256 + 3) -> PointNet(B, 1, 128, 1024) -> Pooling(B, 1, 1024)] -> Features(B, 1, 1024)
分类模块:
Features(B, 1024) -> FC(B, 512) -> FC(B, 256) -> Output(B, n_clsclasses)
分割模块:
Features(B, 1, 1024) -> FP[unsapmling(B, 128, 1024) -> concat(B, 128, 1024+256)->PointNet(B, 128, 256)]
-> FP(unsampling(B, 512, 256) -> concat(B, 512, 256+128) -> PointNet(B, 512, 128))
-> FP(unsampling(B, N, 128) -> concat(B, N, 128+6)->PointNet(B, N, 128))
-> Conv1d(B, N, 128) -> Conv1d(B, N, n_segclasses)
上述模块如果能够了解清楚并能写出代码的话,基于PyTorch的PointNet++网络就可以实现了。
10、PointNet++ 的MSG, MRG架构 ?
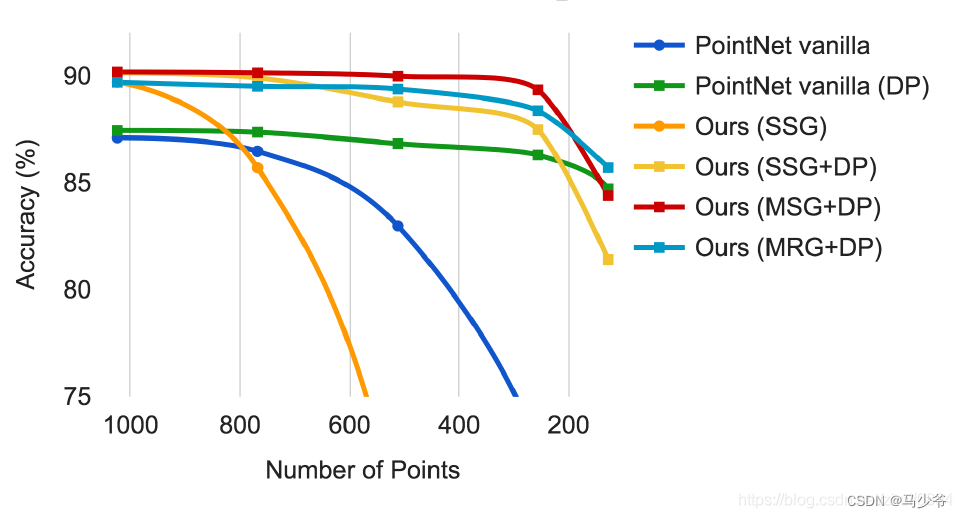
上述文章主要介绍了PointNet++的SSG(single scale grouping), 为了解决点云中密度分布不均匀的问题,作者提出了MSG(multi-scale grouping)和MRG(multi resolution grouping). 下面这张图是作者论文里的图(在ModelNet40数据集上的实验), 测试了PointNet, SSG, MSG, MRG的性能,横坐标表示的是在预测时点云中点的数量,纵坐标表示的是准确率。从图中可以看到, 在点的数量较多时,SSG, MRG, MSG性能相近,明显高于PointNet; 但随着点云中的点的数量下降,准确率明显下滑的有两条线,有轻微下降趋势的有四条线。明显下滑的两条线是没有采取DP策略的。 即使是PointNet网络在采取了DP策略后,其性能在点的数量小于600也会明显高于SSG.。由此可见,DP在解决点云密度不均匀时发挥了重要作用, 而MSG, MRG貌似显得没那么重要 ? 这里就简单介绍一下MSG的思想。
MSG是指在每次Set Abstraction的时候, 在对某个中心点centroid进行group操作的时候采用不同尺寸(例如0.1, 0.2, 0.4, SSG只有0.2)的半径, 来得到不同大小的局部区域,分别送到不同的PointNet网络中,最终把这些学习到的不同尺度的特征进行concat操作来代表当前中心点centroid的操作。
点云如何数据增强 ?
点云不同于图像,图像中有随机裁剪、缩放、颜色抖动等数据增强方式。在点云里,应该如何做数据增强呢?
点云的数据增强主要包括: 随机旋转,随机平移,随机抖动等, 具体实现代码参考:
DP有什么用,是怎么实现的 ?
DP指的是在训练时随机丢弃一些输入点(DP means random input dropout during training),这样的训练方式对于预测低密度点云较为有效(相对于输入点云), 即在高密度点云中训练的模型,在低密度点云中进行预测,可以达到和训练集中旗鼓相当的效果。具体来说,人工设置超参数p(论文中p=0.95), 从[0, p]中随机出一个值dr(drouout ratio), 对于点云中的每一个点,随机产生一个0-1的值, 如果该值小于等于dr则表示该点被丢弃。这里有一个细节,某些点被丢弃之后,每个batch中的点的数量就不相同了,为了解决这个问题,所有被丢掉的点使用第一个点代替,这样就维持了每个batch中点的数量相同。具体实现代码如下(代码中的p=0.875):
def random_point_dropout(pc, max_dropout_ratio=0.875):
dropout_ratio = np.random.random()*max_dropout_ratio # 0~0.875
drop_idx = np.where(np.random.random((pc.shape[0]))<=dropout_ratio)[0]
if len(drop_idx)>0:
pc[drop_idx,:] = pc[0,:] # set to the first point
return pc
参考链接:https://blog.csdn.net/zhulf0804/article/details/108530499
边栏推荐
猜你喜欢

Simple modal box

win10虚拟机集群优化方案
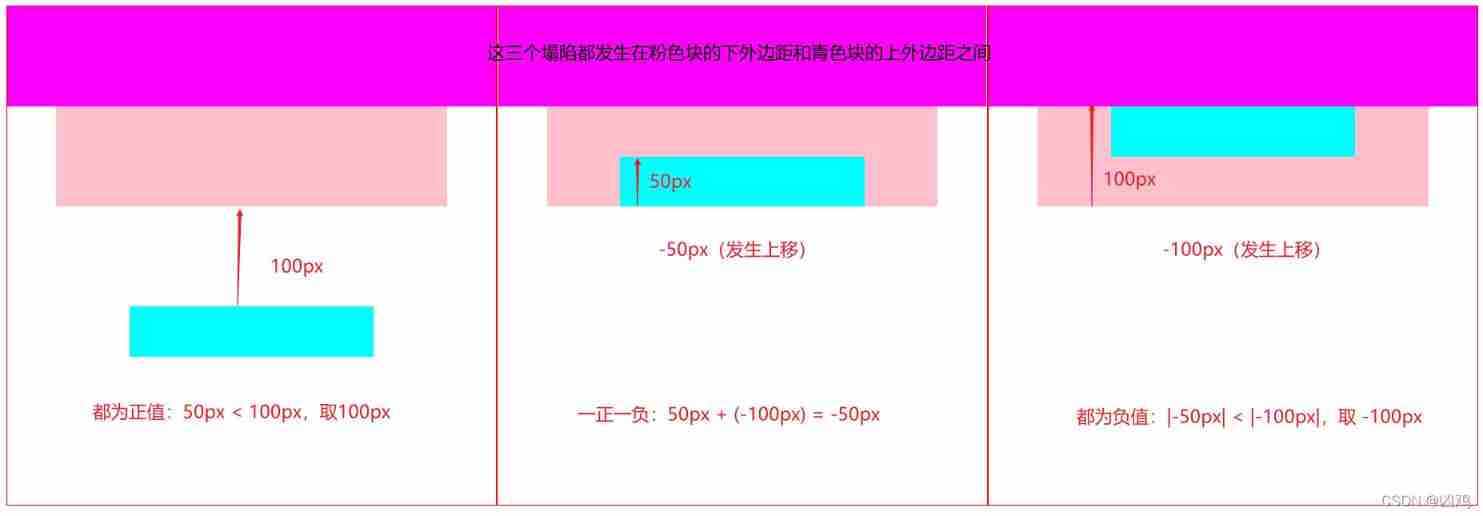
Collapse of adjacent vertical outer margins

To the distance we have been looking for -- film review of "flying house journey"
![[turn to] MySQL operation practice (III): table connection](/img/70/20bf9b379ce58761bae9955982a158.png)
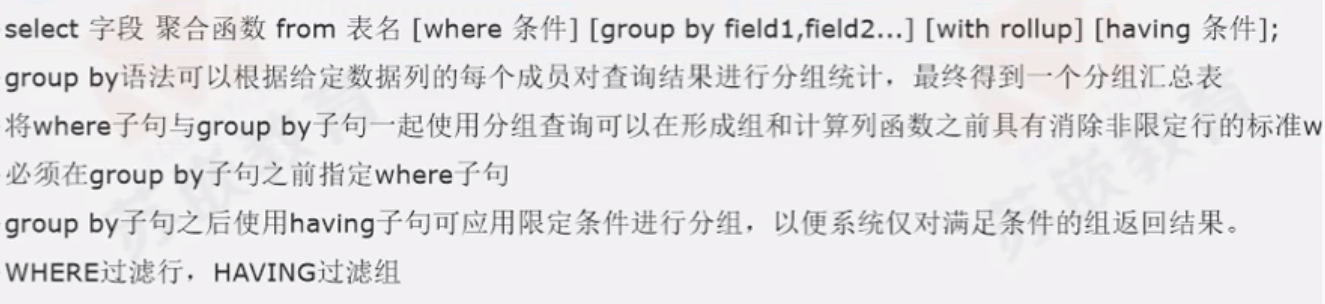
[turn to] MySQL operation practice (III): table connection
嵌入式数据库开发编程(五)——DQL
[转]MySQL操作实战(三):表联结
![[turn to] MySQL operation practice (I): Keywords & functions](/img/b1/8b843014f365b786e310718f669043.png)
[turn to] MySQL operation practice (I): Keywords & functions
Learning notes of "hands on learning in depth"
《动手学深度学习》学习笔记
随机推荐
[转]:Apache Felix Framework配置属性
PMP考试敏捷占比有多少?解疑
2022/7/2 question summary
Haut OJ 1221: a tired day
Applet live + e-commerce, if you want to be a new retail e-commerce, use it!
Haut OJ 1350: choice sends candy
UE 虚幻引擎,项目结构
Basic knowledge points
Unity check whether the two objects have obstacles by ray
Vs2015 secret key
[speed pointer] 142 circular linked list II
Judge the position of the monster in the role under unity3d
Solon 框架如何方便获取每个请求的响应时间?
Unity ugui source code graphic
[allocation problem] 135 Distribute candy
A complete attack chain
cocos_ Lua listview loads too much data
BUUCTF MISC
[trans]: spécification osgi
Dotween usage records ----- appendinterval, appendcallback