当前位置:网站首页>Personal notes of graphics (2)
Personal notes of graphics (2)
2022-07-07 16:30:00 【qq_ fifty-seven million two hundred and fifty-one thousand thre】
Tips : Remember one 2×2 Multiply by a matrix of The result of two-dimensional vector can fully understand the following formula :
The form of transformation : Multiply a matrix by a vector ( Multiply the matrix of the same dimension by the variables of the same dimension )
linear transformation
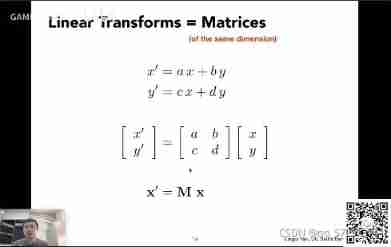
a1 a2 x
ride
b1 b2 y
a1x+a2y,b1x+b2y
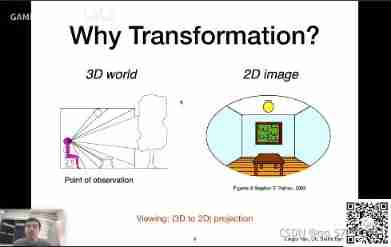
Transformation :
Except for rotation
And from the three-dimensional world to the two-dimensional world
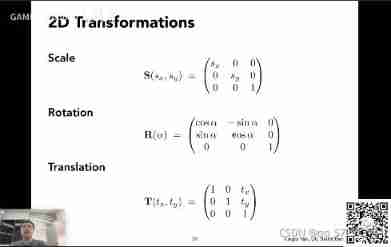
1. The zoom :
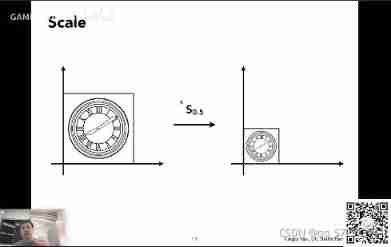

s=0.5
Express in matrix
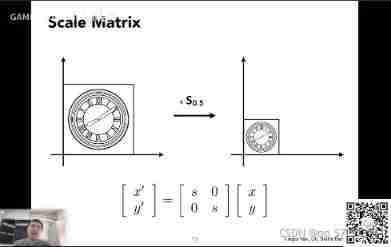
Uneven scaling :
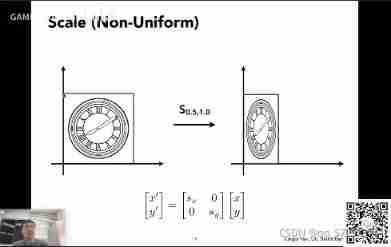
sx=0.5 sy=1
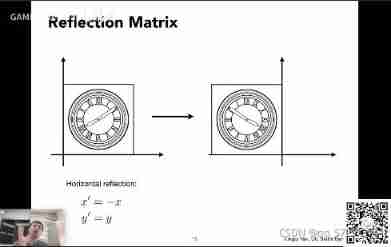
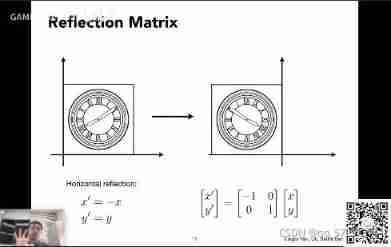
2. Reflection ( symmetry )
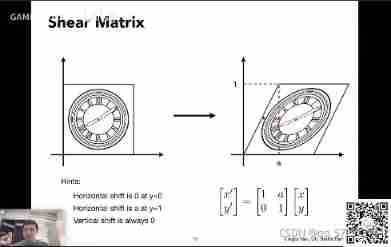
3. shear ( Pull a corner )
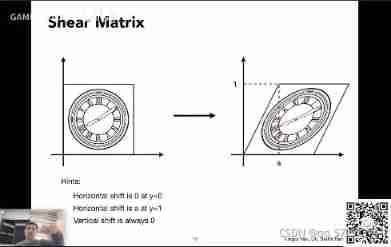
( Ideas : All points y It's all the same , The only change is all points x value ,x How does the value change ?
When y by 0 When x unchanged , When y by 1 When x Add 1, When y Greater than zero and less than one be x Add a*y)
Express in matrix
An idea of writing transformation : Find some rules before and after the transformation
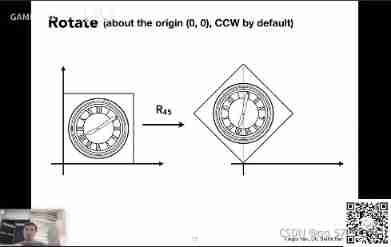
4. rotate ( The default is around the origin , Default CCW )
deduction



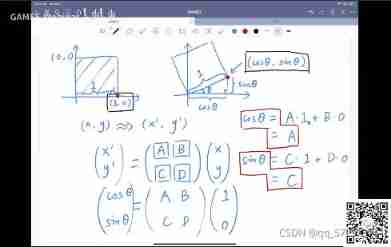
The original coordinate is (1,0) After conversion, it is (cos,sin)
Get this formula
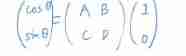
The formula is solved as
I got it AC Value The rest is to find a point to calculate the rest BD The value of
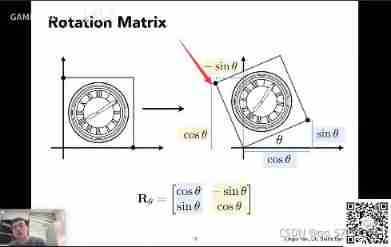
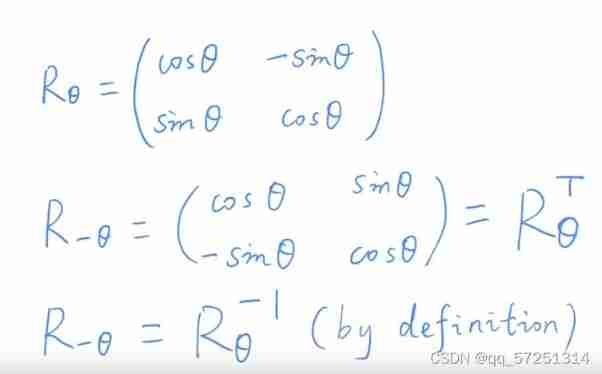
The inverse matrix of this rotation only needs to change the lower left corner to negative , Just change the upper right corner to positive
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
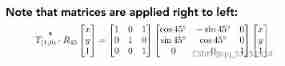
Homogeneous coordinates : Because translation transformation is special , So we have the concept of homogeneous coordinates
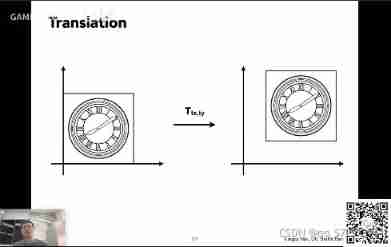
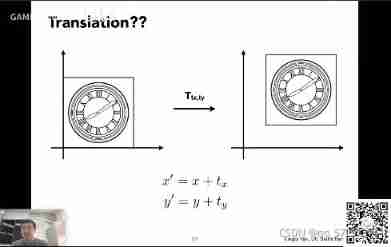
But it can't be written in the form of a matrix multiplied by a vector just now
It can only be written like this (abcd The matrix is linear Don't do anything 1001):
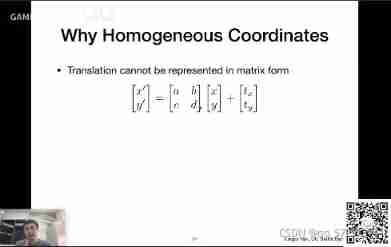
Because the translation transformation is not a linear transformation
reflection : Can the calculation methods of the above transformations be unified ( Including translation , Including zoom ...)
answer : You can add a dimension
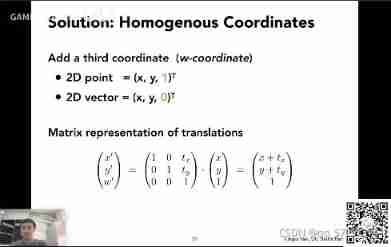
( spot : increase 1 vector : increase 0 Because vectors have translation invariance )
More significance of introducing homogeneous coordinates
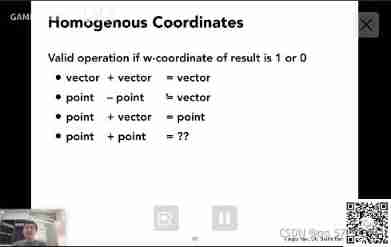
Point plus point equals midpoint
Affine transformation can be in the form of coprocess matrix multiplied by variables
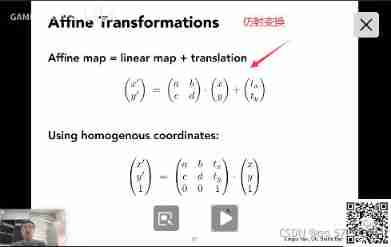
With translation without translation There is linear transformation, no linear transformation
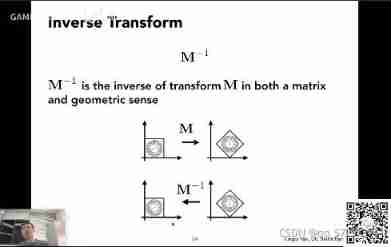
inverse transformation : Reverse the previous transformation
Combination of various transformations :
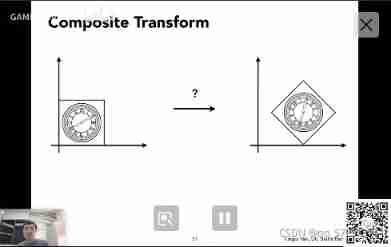
The order of transformation is very important
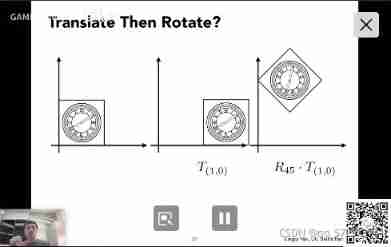
Translate first and then rotate
First rotate in Translation
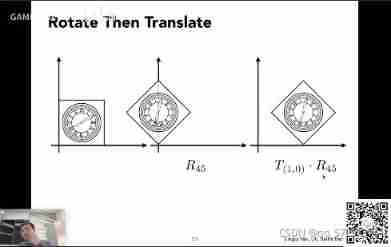
【 From right to left !!!!!!!!!】
It means that the rightmost matrix multiplies first That is to say, the rightmost one should rotate first The next matrix is the moving matrix

Decomposition of transformation :
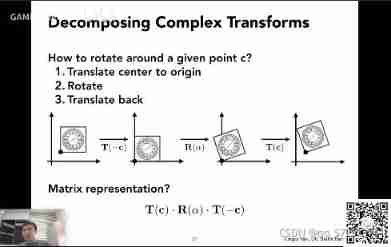
ask : How to rotate the first picture along the lower left corner 45 degree ?
answer :1. First subtract all points c 2. Rerotation 45 degree 3. Add all the points c
Matrix form ( From right to left ):
![]()
Three dimensional space transformation
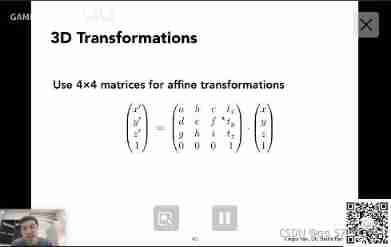
Pretty much , But there are several important properties
1. The inverse matrix of rotation is equal to the transpose matrix of rotation ( Here's the picture ) That is to say, the rotation matrix is an orthogonal matrix
2.
For us, a xyzw The point of stay 3 The point representation of dimensional space is Divide everything by w(w It must be 1 w by 1 Represents a dot )

3.
about For the rotation of three-dimensional space , Looking at the rotation can raise our right hand for instance x to turn to z Just forgive y Shaft rotation ,y Constant so 0 1 0
But why is the edge here y Axis rotation is different from other matrices , Hurt to raise our right hand , Think about the cross product rule ,
In order to get z Axis must x Cross riding y Axis ( Anti-clockwise ), In order to get x Axis must y Cross riding z( Anti-clockwise ), In order to get y Axis must z Cross riding x( Clockwise )
At this time, the smart little friend has seen it
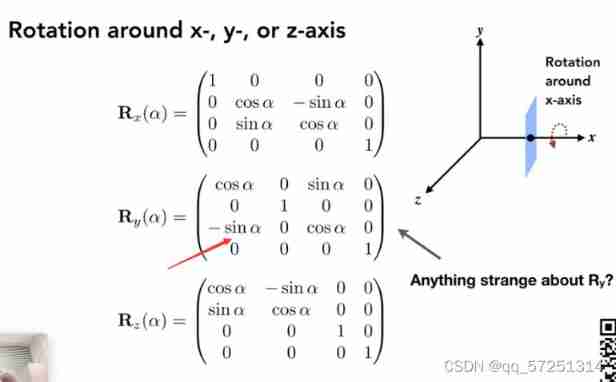
We must remember For complex rotation, we must be able to decompose it into simple rotation That is to say, arbitrary 3d rotate
We can all write it around x Axial winding y Axial winding z Axis

α β γ These three angles are also called Euler angles
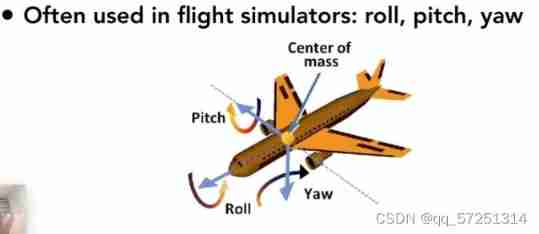
How to prove ? You can imagine three operations of the aircraft
pitch( pitch )x The axis does not change z turn x Axis
roll( Roll )z The axis does not change x To y Axis
yaw( Turn around )...
边栏推荐
猜你喜欢
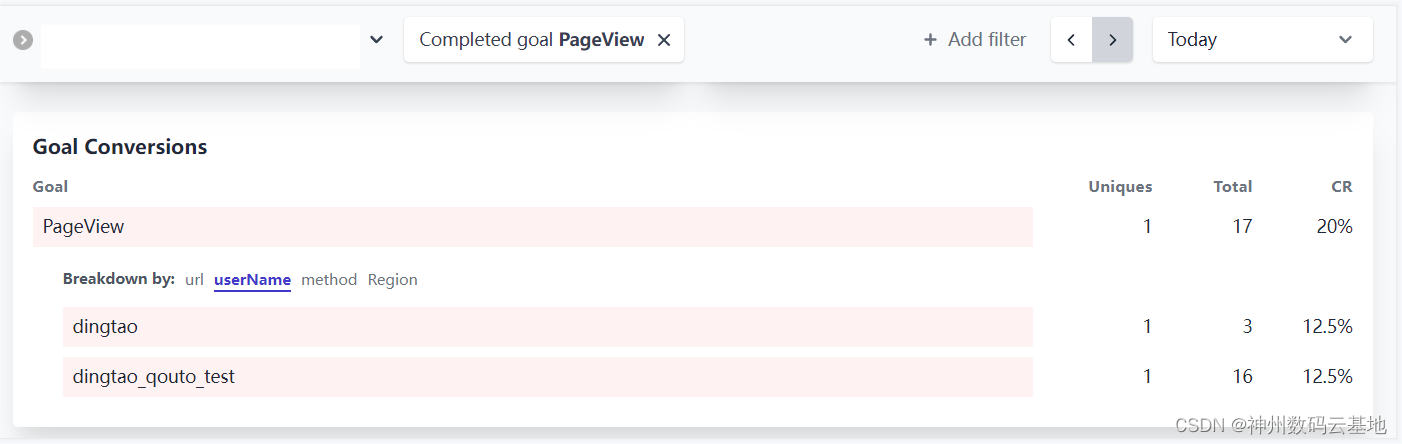
Odoo集成Plausible埋码监控平台
Unity3D_ Class fishing project, bullet rebound effect is achieved
![Application example of infinite list [uigridview]](/img/11/3be1c63680e6de8f068e79690ecf12.jpg)
Application example of infinite list [uigridview]

1亿单身男女“在线相亲”,撑起130亿IPO

无法将“pip”项识别为 cmdlet、函数、脚本文件或可运行程序的名称
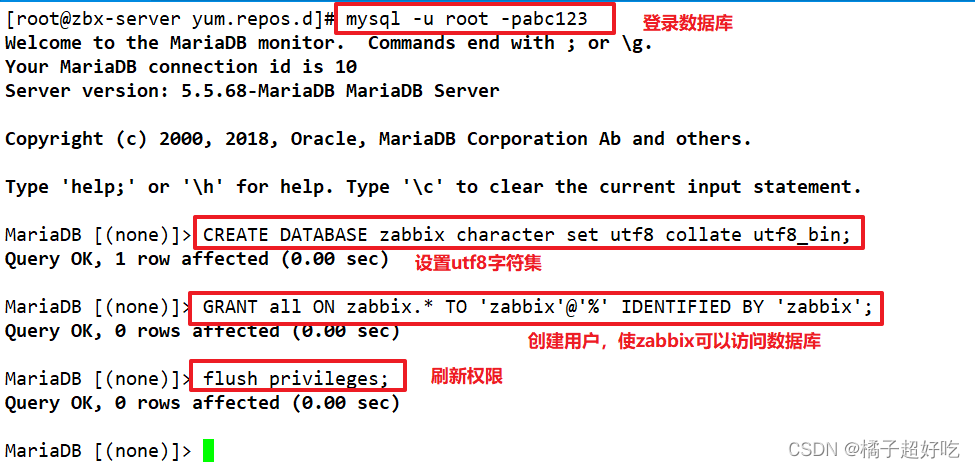
Step by step monitoring platform ZABBIX
![[Android -- data storage] use SQLite to store data](/img/f6/a4930276b3da25aad3ab1ae6f1cf49.png)
[Android -- data storage] use SQLite to store data

Lecturer solicitation order | Apache seatunnel (cultivating) meetup sharing guests are in hot Recruitment!

Leetcode-231-2的幂
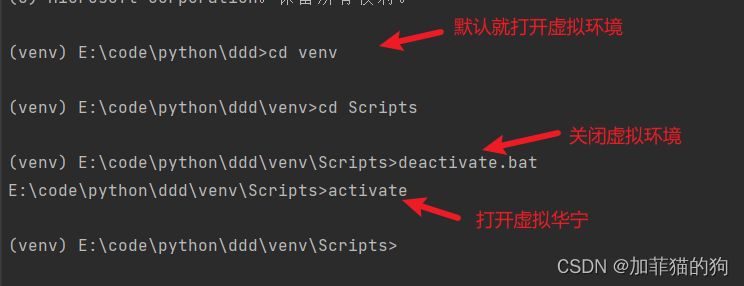
pycharm 终端部启用虚拟环境
随机推荐
Shandong old age Expo, 2022 China smart elderly care exhibition, smart elderly care and aging technology exhibition
Performance measure of classification model
TCP framework___ Unity
TiDB For PostgreSQL和YugabyteDB在Sysbench上的性能对比
Logback日志框架第三方jar包 免费获取
hellogolang
js中复选框checkbox如何判定为被选中
应用程序和matlab的通信方式
The inevitable trend of the intelligent development of ankerui power grid is that microcomputer protection devices are used in power systems
markdown公式编辑教程
Application example of infinite list [uigridview]
Dotween -- ease function
MySQL中, 如何查询某一天, 某一月, 某一年的数据
模仿企业微信会议室选择
Mysql database basic operation DQL basic query
Unity drawing plug-in = = [support the update of the original atlas]
The team of East China Normal University proposed the systematic molecular implementation of convolutional neural network with DNA regulation circuit
3000 words speak through HTTP cache
PHP has its own filtering and escape functions
Laravel constructor and middleware execution order