当前位置:网站首页>深度学习 网络正则化
深度学习 网络正则化
2022-07-04 13:28:00 【落花雨时】
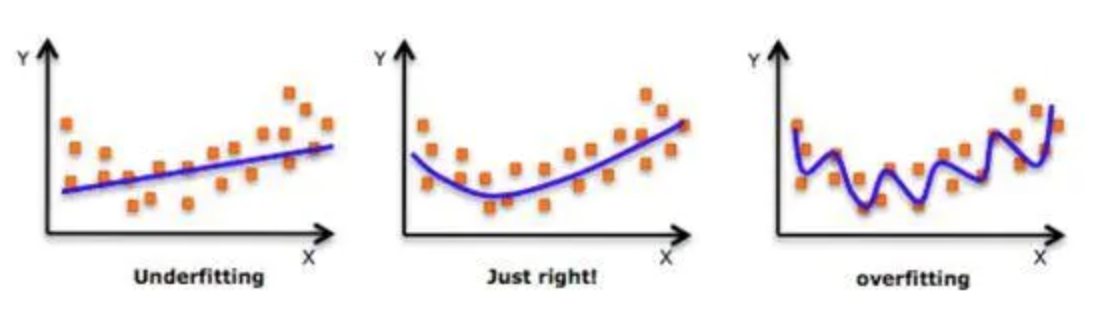
在设计机器学习算法时不仅要求在训练集上误差小,而且希望在新样本上的泛化能力强。许多机器学习算法都采用相关的策略来减小测试误差,这些策略被统称为正则化。因为神经网络的强大的表示能力经常遇到过拟合,所以需要使用不同形式的正则化策略。
正则化通过对算法的修改来减少泛化误差,目前在深度学习中使用较多的策略有参数范数惩罚,提前终止,DropOut等,接下来我们对其进行详细的介绍。
1. L1与L2正则化(回顾)
L1和L2是最常见的正则化方法。它们在损失函数(cost function)中增加一个正则项,由于添加了这个正则化项,权重矩阵的值减小,因为它假定具有更小权重矩阵的神经网络导致更简单的模型。 因此,它也会在一定程度上减少过拟合。然而,这个正则化项在L1和L2中是不同的。
L2正则化

这里的λ是正则化参数,它是一个需要优化的超参数。L2正则化又称为权重衰减,因为其导致权重趋向于0(但不全是0)L1正则化

这里,我们惩罚权重矩阵的绝对值。其中,λ 为正则化参数,是超参数,不同于L2,权重值可能被减少到0.因此,L1对于压缩模型很有用。其它情况下,一般选择优先选择L2正则化。
在tf.keras中实现使用的方法是:
- L1正则化
tf.keras.regularizers.L1(l1=0.01)
- L2正则化
tf.keras.regularizers.L2(l2=0.01)
- L1L2正则化
tf.keras.regularizers.L1L2(
l1=0.0, l2=0.0
)
我们直接在某一层的layers中指明正则化类型和超参数即可:
# 导入相应的工具包
import tensorflow as tf
from tensorflow.keras import regularizers
# 创建模型
model = tf.keras.models.Sequential()
# L2正则化,lambda为0.01
model.add(tf.keras.layers.Dense(16, kernel_regularizer=regularizers.l2(0.001),
activation='relu', input_shape=(10,)))
# L1正则化,lambda为0.01
model.add(tf.keras.layers.Dense(16, kernel_regularizer=regularizers.l1(0.001),
activation='relu'))
# L1L2正则化,lambda1为0.01,lambda2为0.01
model.add(tf.keras.layers.Dense(16, kernel_regularizer=regularizers.L1L2(0.001, 0.01),
activation='relu'))
2. Dropout正则化
dropout是在深度学习领域最常用的正则化技术。Dropout的原理很简单:假设我们的神经网络结构如下所示,在每个迭代过程中,随机选择某些节点,并且删除前向和后向连接。
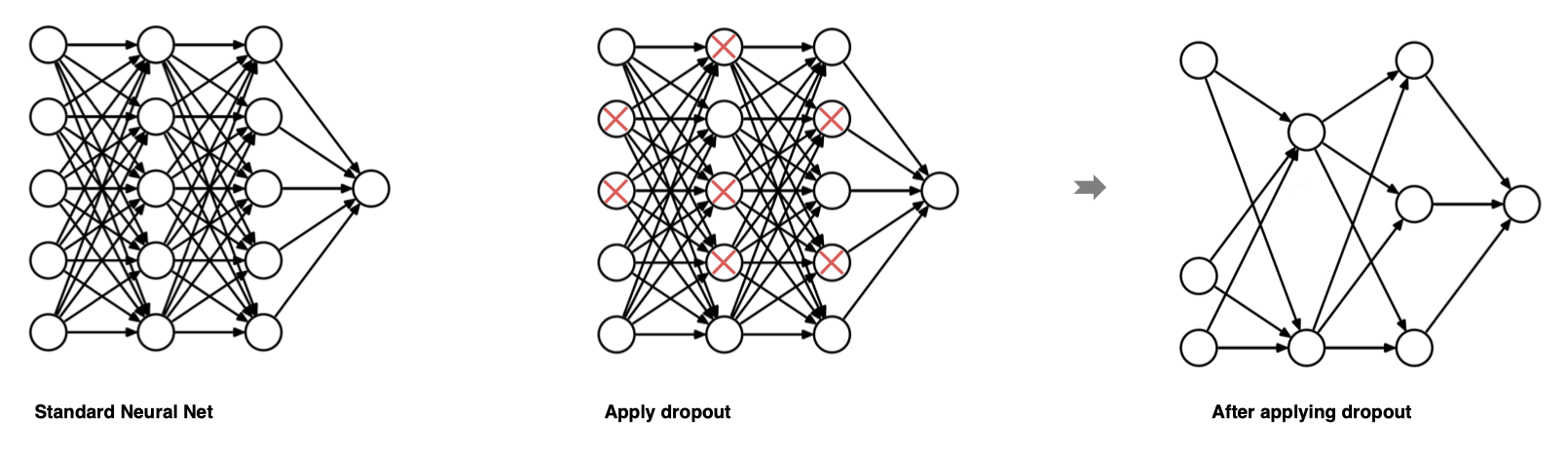
因此,每个迭代过程都会有不同的节点组合,从而导致不同的输出,这可以看成机器学习中的集成方法(ensemble technique)。集成模型一般优于单一模型,因为它们可以捕获更多的随机性。相似地,dropout使得神经网络模型优于正常的模型。
在tf.keras中实现使用的方法是dropout:
tf.keras.layers.Dropout(rate)
参数:
rate: 每一个神经元被丢弃的概率
例子:
# 导入相应的库
import numpy as np
import tensorflow as tf
# 定义dropout层,每一个神经元有0.2的概率被失活,未被失活的输入将按1 /(1-rate)放大
layer = tf.keras.layers.Dropout(0.2,input_shape=(2,))
# 定义五个批次的数据
data = np.arange(1,11).reshape(5, 2).astype(np.float32)
# 原始数据进行打印
print(data)
# 进行随机失活:在training模式中,返回应用dropout后的输出;或者在非training模式下,正常返回输出(没有dropout)
outputs = layer(data,training=True)
# 打印失活后的结果
print(outputs)
结果为:
[[ 1. 2.]
[ 3. 4.]
[ 5. 6.]
[ 7. 8.]
[ 9. 10.]]
tf.Tensor(
[[ 1.25 2.5 ]
[ 0. 5. ]
[ 6.25 7.5 ]
[ 8.75 10. ]
[ 0. 12.5 ]], shape=(5, 2), dtype=float32)
3. 提前停止
提前停止(early stopping)是将一部分训练集作为验证集(validation set)。 当验证集的性能越来越差时或者性能不再提升,则立即停止对该模型的训练。 这被称为提前停止。
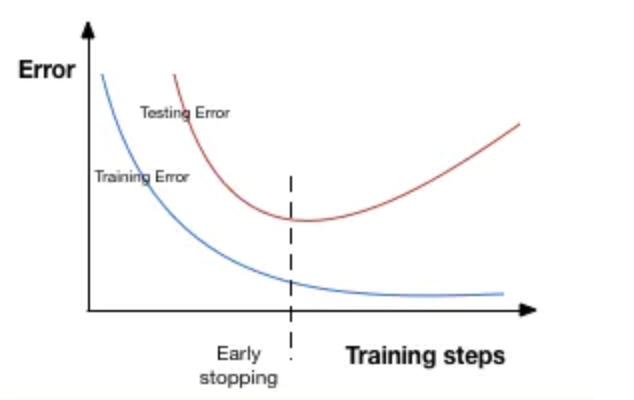
在上图中,在虚线处停止模型的训练,此时模型开始在训练数据上过拟合。
在tf.keras中,我们可以使用callbacks函数实现早期停止:
tf.keras.callbacks.EarlyStopping(
monitor='val_loss', patience=5
)
上面,monitor参数表示监测量,这里val_loss表示验证集损失。而patience参数epochs数量,当在这个过程性能无提升时会停止训练。为了更好地理解,让我们再看看上面的图片。 在虚线之后,每个epoch都会导致更高的验证集误差。 因此,虚线后patience个epoch,模型将停止训练,因为没有进一步的改善。
# 导入相应的工具包
import tensorflow as tf
import numpy as np
# 当连续3个epoch loss不下降则停止训练
callback = tf.keras.callbacks.EarlyStopping(monitor='loss', patience=3)
# 定义只有一层的神经网络
model = tf.keras.models.Sequential([tf.keras.layers.Dense(10)])
# 设置损失函数和梯度下降算法
model.compile(tf.keras.optimizers.SGD(), loss='mse')
# 模型训练
history = model.fit(np.arange(100).reshape(5, 20), np.array([0,1,2,1,2]),
epochs=10, batch_size=1, callbacks=[callback],
verbose=1)
# 打印运行的epoch
len(history.history['loss'])
输出:
Epoch 1/10
5/5 [==============================] - 0s 600us/step - loss: 145774557280600064.0000
Epoch 2/10
5/5 [==============================] - 0s 522us/step - loss: 10077891596456623723194184833695744.0000
Epoch 3/10
5/5 [==============================] - 0s 1ms/step - loss: inf
Epoch 4/10
5/5 [==============================] - 0s 1ms/step - loss: inf
# 只运行了4次
4
4. 批标准化
批标准化(BN层,Batch Normalization)是2015年提出的一种方法,在进行深度网络训练时,大多会采取这种算法,与全连接层一样,BN层也是属于网络中的一层。
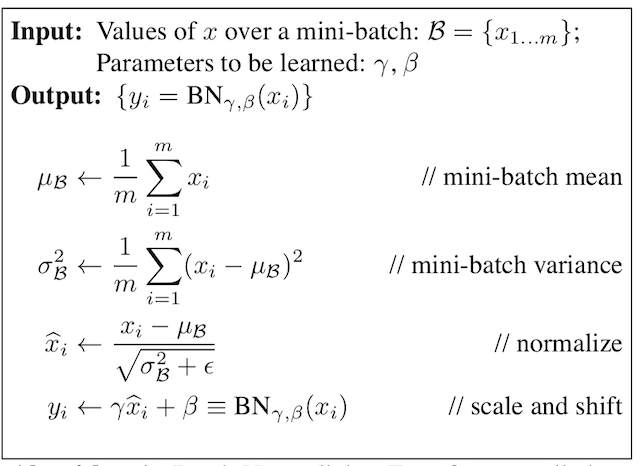
BN层是针对单个神经元进行,利用网络训练时一个 mini-batch 的数据来计算该神经元xi 的均值和方差,归一化后并重构,因而称为 Batch Normalization。在每一层输入之前,将数据进行BN,然后再送入后续网络中进行学习:
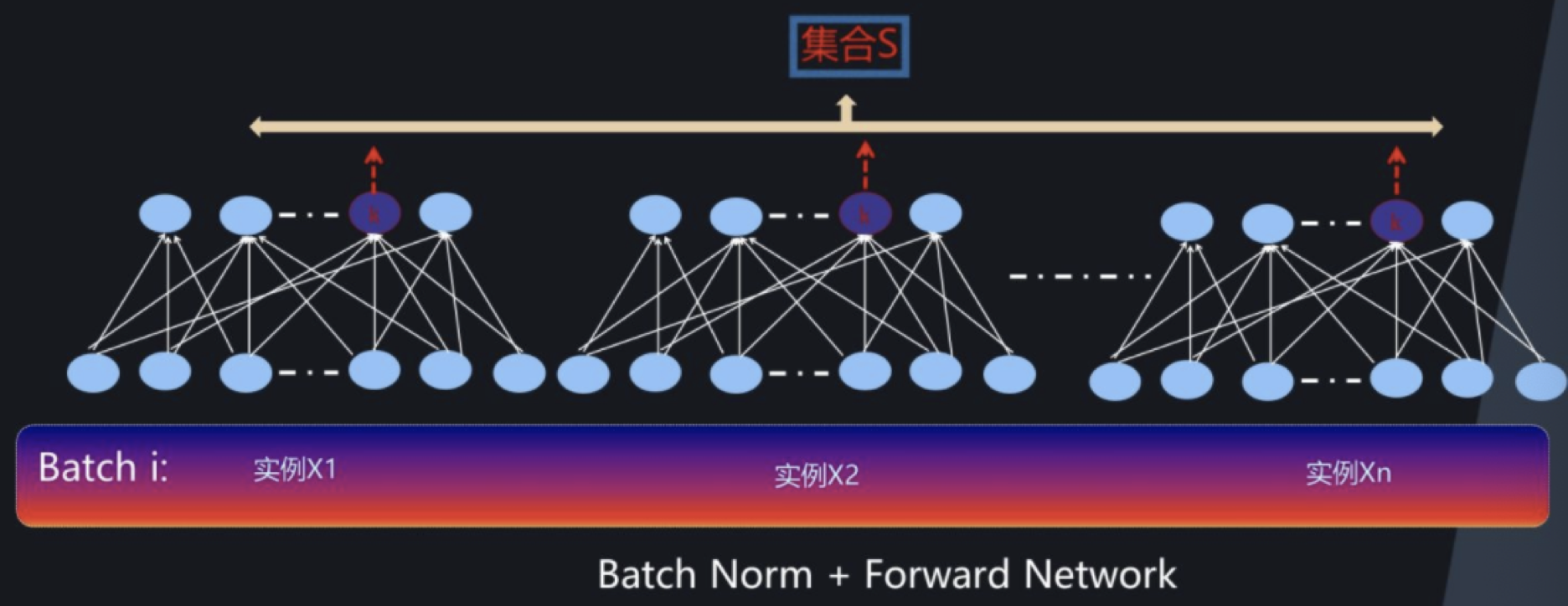
首先我们对某一批次的数据的神经元的输出进行标准化,
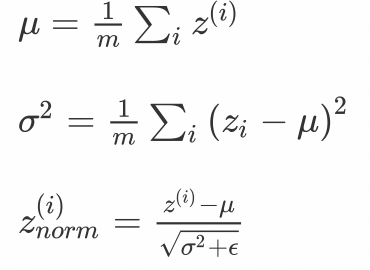
然后在使用变换重构,引入了可学习参数γ、β,如果各隐藏层的输入均值在靠近0的区域,即处于激活函数的线性区域,不利于训练非线性神经网络,从而得到效果较差的模型。因此,需要用 γ 和 β 对标准化后的结果做进一步处理:
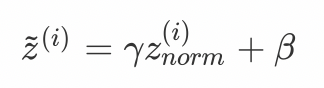
这就是BN层最后的结果。整体流程如下图所示:
在tf.keras中实现使用:
# 直接将其放入构建神经网络的结构中即可
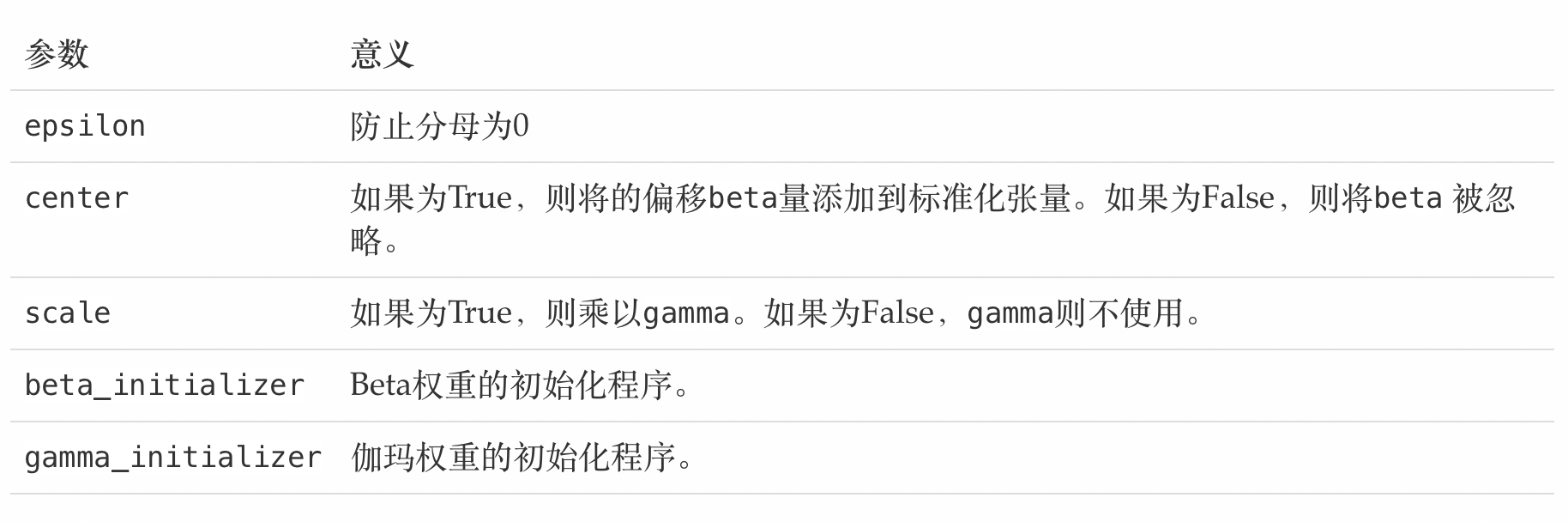
tf.keras.layers.BatchNormalization(
epsilon=0.001, center=True, scale=True,
beta_initializer='zeros', gamma_initializer='ones',
)
总结
知道L2正则化与L1正则化的方法
在损失函数(cost function)中增加一个正则项,由于添加了这个正则化项,权重矩阵的值减小,因为它假定具有更小权重矩阵的神经网络导致更简单的模型知道随机失活droupout的应用
在每个迭代过程中,随机选择某些节点,并且删除前向和后向连接知道提前停止的使用方法
当看到验证集的性能越来越差时或者性能不再提升,立即停止对该模型的训练知道BN层的使用方法
利用网络训练时一个 mini-batch 的数据来计算该神经元xi 的均值和方差,归一化后并重构,因而称为 Batch Normalization
边栏推荐
- LVGL 8.2 keyboard
- LVGL 8.2 Menu
- Some problems and ideas of data embedding point
- LVGL 8.2 List
- LeetCode 1200 最小絕對差[排序] HERODING的LeetCode之路
- flink sql-client. SH tutorial
- Implementation of macro instruction of first-order RC low-pass filter in signal processing (easy touch screen)
- 各大主流编程语言性能PK,结果出乎意料
- Solutions to the problems of miui12.5 red rice k20pro using Au or povo2
- 92. (cesium chapter) cesium building layering
猜你喜欢
Data center concept

如何搭建一支搞垮公司的技术团队?
Query optimizer for SQL optimization
Leecode learning notes - Joseph problem

The failure rate is as high as 80%. What are the challenges on the way of enterprise digital transformation?
程序员自曝接私活:10个月时间接了30多个单子,纯收入40万

Opencv learning notes - linear filtering: box filtering, mean filtering, Gaussian filtering
Digi重启XBee-Pro S2C生产,有些差别需要注意
LVGL 8.2 LED
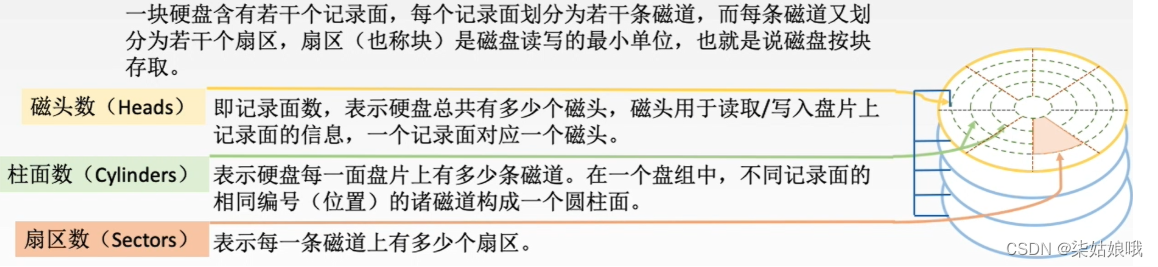
03-存储系统
随机推荐
LVGL 8.2 Menu
Nowcoder reverse linked list
LVGL 8.2 Line wrap, recoloring and scrolling
Pandora IOT development board learning (RT thread) - Experiment 3 button experiment (learning notes)
openresty 限流
韩国AI团队抄袭震动学界!1个导师带51个学生,还是抄袭惯犯
Data center concept
Chapter 17 process memory
C language personal address book management system
Count the running time of PHP program and set the maximum running time of PHP
LVLG 8.2 circular scrolling animation of a label
openresty 重定向
LVGL 8.2 LED
Implementation of macro instruction of first-order RC low-pass filter in signal processing (easy touch screen)
scratch古堡历险记 电子学会图形化编程scratch等级考试三级真题和答案解析2022年6月
Leetcode 1200 minimum absolute difference [sort] the way of leetcode in heroding
es6模块化
Nowcoder rearrange linked list
ES6 modularization
SqlServer函数,存储过程的创建和使用