当前位置:网站首页>【滤波跟踪】基于matlab捷联惯导仿真【含Matlab源码 1935期】
【滤波跟踪】基于matlab捷联惯导仿真【含Matlab源码 1935期】
2022-07-07 09:46:00 【海神之光】
一、获取代码方式
获取代码方式1:
完整代码已上传我的资源:【滤波跟踪】基于matlab捷联惯导仿真【含Matlab源码 1935期】
获取代码方式2:
通过订阅紫极神光博客付费专栏,凭支付凭证,私信博主,可获得此代码。
备注:订阅紫极神光博客付费专栏,可免费获得1份代码(有效期为订阅日起,三天内有效);
二、捷联惯导仿真简介
1 捷联惯导系统误差方程
导航系采用东北天坐标系时捷联惯导系统的误差方程为: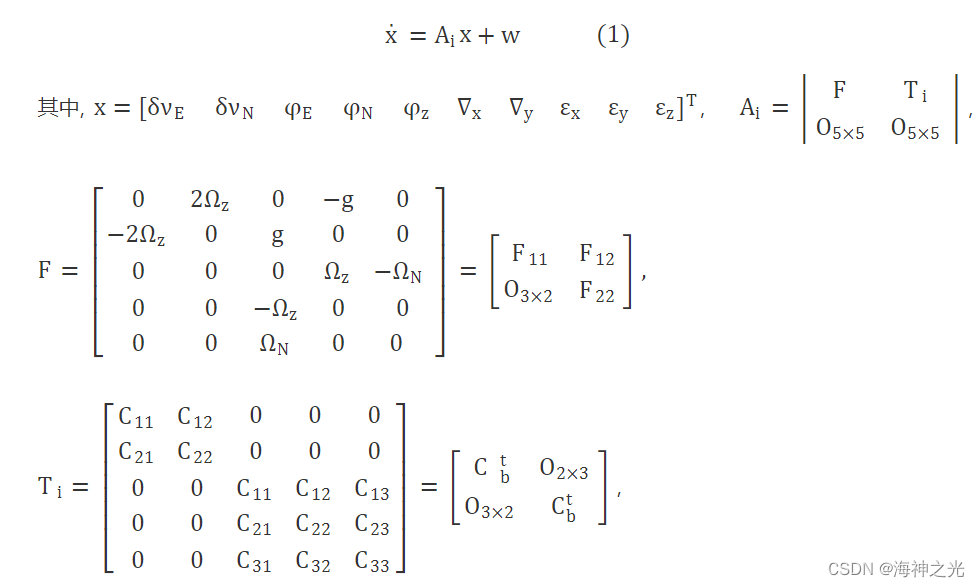
δνE、δνN为速度误差沿东、北方向的分量;φE、φN、φZ为不对准角在东、北、天方向的分量;∇x、∇x为加速度计的零偏;εx、εy、εz为陀螺漂移;ΩN、ΩZ为地球转速在北、天方向的投影;Ctb为机体系到导航系 (东北天坐标系) 的变换阵;w为白噪声向量。
用加速度计的水平输出作为测量值, 则测量方程为:
z=Cx+ν
式中C=[I2O2×8], I为单位矩阵;ν为白噪声向量。如希望卡尔曼滤波器具有满意的滤波效果, 需了解系统的可观测性。对任一固定位置
RankVi=7Vi=[CT ATiCT (ATi)2CT (ATi)3CT (ATi)4CT (ATi)5CT (ATi)6CT (ATi)7CT (ATi)8CT (ATi)9CT]T (3)
可见系统是不可观测的, 因此一位置对准不能对所有的状态进行估计。
三、部分源代码
%**************************************************************************
%纯惯导解算主函数
%IMU的b-frame是前右下,数据文件格式为:
%GPS周秒、Gx、Gy、Gz、Ax、Ay、Az (G代表陀螺,A代表加速度计)
%陀螺和加速度计数据均为增量形式,单位分别为rad和m/s
%导航坐标为北东地
%**************************************************************************
clc;
clear;
close all
format long
%WGS84椭球参数
WGS84.a = 6378137.0;%长半轴
WGS84.b=6356752.3142;%短半轴
WGS84.f = 1/298.257223563;%扁率
WGS84.e2=0.00669437999013;%第一偏心率平方
WGS84.ep2=0.006739496742227;%第二偏心率平方
WGS84.we=7.292115e-5;%地球自转角速率
WGS84.GM=3.986004418e+14;%地球引力为常数
WGS84.ge=9.7803267715;%赤道重力加速度
WGS84.gp=9.8321863685;%极地重力加速度
BLH0=[23.1373950708/180*pi; 113.3713651222/180*pi;2.175 ];%初始位置(纬rad,经rad,高m)
v0=[0;0;0];%初始速度(m/s)
Euler0(1,1)=0.0107951084511778/180*pi;%初始欧拉角roll
Euler0(2,1)=-2.14251290749072/180*pi;%pitch
Euler0(3,1)= -75.7498049314083/180*pi;%yaw
qbn0=EulerToQuaternion(Euler0);%初始姿态四元数
Cbn0=QuaternionToDCM(qbn0);%初始方向余弦阵
fid=fopen('Data1.bin','r');%打开原始数据文件
fp=fopen('Result.txt','w');%打开用来保存结果的文本
fb=fopen('Data1_PureINS.bin','r');%打开参考结果文件
fd=fopen('error.txt','w');%打开保存差值的文件
fe=fopen('Data1_PureINS.txt','w');%打开保存参考结果的文件
t0=91620.0;%初始时间
Deltatheta0=[0;0;0];%初始陀螺输出
Deltav0=[0;0;0];%初始加速度计输出
button=questdlg('是否实时绘坐标图?(实时绘图运行极慢!)','问题提示','Yes','No','No');
if strcmp(button,'Yes')==1
figure;
plot3(BLH0(1)*180/pi,BLH0(2)*180/pi,BLH0(3),'.r');
grid on;
hold on
end
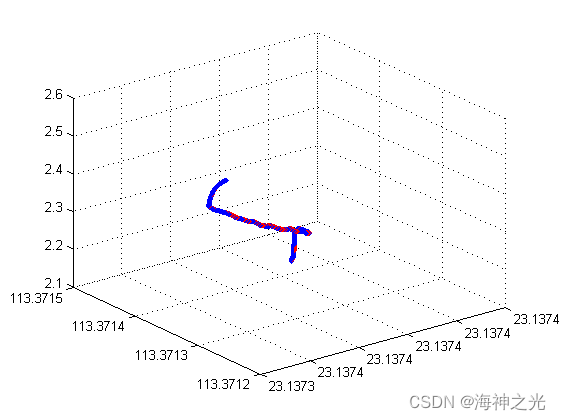
四、运行结果
五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 沈再阳.精通MATLAB信号处理[M].清华大学出版社,2015.
[2]高宝建,彭进业,王琳,潘建寿.信号与系统——使用MATLAB分析与实现[M].清华大学出版社,2020.
[3]王文光,魏少明,任欣.信号处理与系统分析的MATLAB实现[M].电子工业出版社,2018.
[4]王艳东,范跃祖.捷联惯导系统多位置对准研究[J].中国惯性技术学报. 2000,(03)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
边栏推荐
- CMU15445 (Fall 2019) 之 Project#2 - Hash Table 详解
- Zhou Yajin, a top safety scholar of Zhejiang University, is a curiosity driven activist
- 自动化测试框架
- Talk about SOC startup (IX) adding a new board to uboot
- R語言使用magick包的image_mosaic函數和image_flatten函數把多張圖片堆疊在一起形成堆疊組合圖像(Stack layers on top of each other)
- Vuthink正确安装过程
- Software design - "high cohesion and low coupling"
- LeetCode - 面试题17.24 最大子矩阵
- audit 移植
- vim 的各种用法,很实用哦,都是本人是在工作中学习和总结的
猜你喜欢
一度辍学的数学差生,获得今年菲尔兹奖
The post-90s resigned and started a business, saying they would kill cloud database
RationalDMIS2022阵列工件测量
There are so many factors that imprison you
分布式数据库主从配置(MySQL)

科普达人丨一文弄懂什么是云计算?
正在运行的Kubernetes集群想要调整Pod的网段地址

Some opinions and code implementation of Siou loss: more powerful learning for bounding box regression zhora gevorgyan

技术分享 | 抓包分析 TCP 协议

The Oracle message permission under the local Navicat connection liunx is insufficient
随机推荐
Vuthink proper installation process
'module 'object is not callable error
Poor math students who once dropped out of school won the fields award this year
MySQL安装常见报错处理大全
STM32F1与STM32CubeIDE编程实例-315M超再生无线遥控模块驱动
vim 的各种用法,很实用哦,都是本人是在工作中学习和总结的
聊聊SOC启动(七) uboot启动流程三
STM32入门开发 编写DS18B20温度传感器驱动(读取环境温度、支持级联)
Creative information was surveyed by 2 institutions: greatdb database has been deployed in 9 places
简单介绍一下闭包及它的一些应用场景
【系统设计】指标监控和告警系统
网络协议 概念
【时间格式工具函数的封装】
问下flinkcdc2.2.0的版本,支持并发,这个并发是指多并行度吗,现在发现,mysqlcdc全
R语言使用quantile函数计算评分值的分位数(20%、40%、60%、80%)、使用逻辑操作符将对应的分位区间(quantile)编码为分类值生成新的字段、strsplit函数将学生的名和姓拆分
Verilog design responder [with source code]
The annual salary of general test is 15W, and the annual salary of test and development is 30w+. What is the difference between the two?
【最短路】ACwing 1127. 香甜的黄油(堆优化的dijsktra或spfa)
博客搬家到知乎
VIM command mode and input mode switching