当前位置:网站首页>【机器人库】 awesome-robotics-libraries
【机器人库】 awesome-robotics-libraries
2022-07-06 02:00:00 【十年一梦实验室】
 http://jslee02.github.io/awesome-robotics-libraries/
http://jslee02.github.io/awesome-robotics-libraries/
A curated list of robotics simulators and libraries.
机器人仿真器和库的精选列表。
Table of Contents 目录
Simulators 仿真器
Libraries 库
Dynamics Simulation
Inverse Kinematics
Machine Learning
Motion Planning and Control
Optimization
Robot Modeling
Robot Platform
SLAM
Vision
Fluid
Multiphysics
Math
ETC
动力学仿真
逆运动学
机器学习
运动规划与控制
优化
机器人建模
机器人平台
SLAM
视觉
流体
多物理场
数学
等等
Other Awesome Lists 其他很棒的清单
Contributing 贡献
Simulators 仿真器
免费或开源
AirSim - 基于虚幻引擎Unreal Engine的自动驾驶汽车仿真器 [github AirSim]
ARGoS -基于物理的模拟器,旨在模拟大型机器人群[github ilpincy/argos3]
ARTE -Matlab工具箱专注于机器人操作臂 [github 4rtur1t0/ARTE]
CARLA -用于自动驾驶研究的开源仿真器 [github carla-simulator/carla]
CoppeliaSim - Formaly V-REP. 虚拟机器人实验平台Virtual robot experimentation platform [github CoppeliaRobotics/CoppeliaSimLib]
Gazebo - 动态多机器人仿真器 [github osrf/gazebo]
GraspIt! - 用于掌握可容纳任意手和机器人设计的研究的仿真器 [github graspit]
Habitat-Sim - 用于嵌入式人工智能研究的仿真平台[github facebookresearch/habitat-sim]
Hexapod Robot Simulator - 六足机器人仿真器-开源六足机器人逆运动学和步态可视化器 [github mithi/hexapod]
Ignition Gazebo - 开源机器人仿真器 [github ignitionrobotics/ign-gazebo]
Isaac - Nvidia的机器人虚拟仿真器
MORSE - -模块化开放式机器人模拟引擎 [github morse]
Neurorobotics Platform - 神经网络控制的机器人的Internet访问模拟 [bitbucket]
PyBullet - 一个易于使用的模拟器,用于机器人技术和深度强化学习 [github bullet3]
Robot Gui - 一个基于three.js的3D机器人界面 [github glumb/robot-gui]
Simbad - Java 3D机器人模拟器,可使用可用的传感器通过修改环境来编写自己的机器人控制器。
Unity - 流行的游戏引擎,现在提供用于机器人仿真的开源工具,教程和资源 [github Unity-Technologies/Unity-Robotics-Hub]
Webots - 提供完整开发环境的机器人仿真器 [github omichel/webots]
Commercial 商业的
Actin Simulation 肌动蛋白模拟
Artiminds - 规划,编程,操作,分析和优化Planning, programming, operation, analysis and optimization
Kineo - 工业机器人和数字模型审查应用程序的路径规划和轨迹优化Path planning and trajectory optimization for industrial robotics and digital mock-up review applications
RobotDK - 机器人的仿真和OLP
RobotStudio
Robot Virtual Worlds
Virtual Robotics Toolkit
Visual Components
Cloud 云
AWS RoboMaker - 简化大规模开发,测试和部署智能机器人应用程序的服务
Libraries 库
Dynamics Simulation 动态仿真
:警告:下表不完整。 如果发现不正确或缺失的内容,请随时举报。
Name Models Features Languages Licenses Code Popularity
ARCSim soft C++
Bullet rigid, soft ik, id, urdf, sdf C++, Python Zlib github bullet3
CHRONO::ENGINE rigid, soft, granular, fluid ik, urdf C++, Python BSD-3-Clause github chrono
DART rigid, soft ik, id, plan, urdf, sdf C++, Python BSD-2-Clause github dart
Drake rigid, aero, fluid ik, trj-opt, plan C++, Matlab BSD-3-Clause github drake
Flex rigid, soft, particle, fluid C++ github NVIDIAGameWorks/FleX
FROST rigid MATLAB BSD-3-Clause github ayonga/frost-dev
IBDS rigid, particle C++ Zlib
idyntree rigid id C++, Python, Matlab, Lua LGPL-2.1 github idyntree
KDL rigid ik C++ LGPL-2.1 github orocos_kinematics_dynamics
kindr rigid (todo) C++, Matlab BSD-3-Clause github kindr
Klampt (todo) (todo) C++, Python BSD-3-Clause github Klampt
LibrePilot uav, vehicles (todo) C++ GPL-3.0 bitbucket, github LibrePilot
MARS (todo) (todo) C++, Python LGPL-3.0 github mars
MBDyn (todo) (todo) C++ GPL-2.1 download
MBSim (todo) (todo) C++ (not specified) github mbsim-env/mbsim
MBSlib (todo) (todo) C++ LGPL-3.0 github mbslib
metapod (todo) (todo) C++ LGPL-3.0 github metapod
Moby rigid id C++ GPL-2.0 github Moby
mrpt vehicle slam, cv C++, Python, Matlab BSD-3-Clause github mrpt
MuJoCo (todo) id C++, Python licenses closed source
mvsim vehicle (todo) C++ GPL-3.0 github ual-arm-ros-pkg/mvsim
Newton Dynamics (todo) (todo) C++ Zlib github newton-dynamics
nphysics (todo) (todo) Rust BSD-3-Clause github sebcrozet/nphysics
ODE rigid C++ LGPL-2.1 or BSD-3-Clause bitbucket
OpenRAVE (todo) (todo) C++, Python LGPL-3.0 github openrave
pinocchio rigid ik, id, urdf, analytical derivatives, code generation C++, Python BSD-2-Clause github pinocchio
PositionBasedDynamics (todo) (todo) C++ MIT github PositionBasedDynamics
PhysX (todo) (todo) C++ unknown github NVIDIAGameWorks/PhysX
PyDy (todo) (todo) Python BSD-3-Clause github pydy
RBDL rigid ik,id,urdf C++, Python Zlib github rbdl
RBDyn rigid (todo) C++, Python LGPL-3.0 github RBDyn
RaiSim (todo) (todo) C++ custom github leggedrobotics/raisimLib
ReactPhysics3d (todo) (todo) C++ Zlib github reactphysics3d
RigidBodyDynamics.jl rigid (todo) Julia MIT “Expat” github RigidBodyDynamics.jl
Rigs of Rods rigid, soft, vehicle (todo) C++ GPL-3.0 github RigsOfRods/rigs-of-rods
Robopy (todo) (todo) Python 3 MIT github adityadua24/robopy
Robotics Library (todo) (todo) C++ GPL-3.0 or BSD-2-Clause github rl
RobWork (todo) (todo) C++ Apache-2.0 gitlab
siconos (todo) (todo) C++, Python Apache-2.0 github siconos
Simbody rigid, molecules id, urdf C++ Apache-2.0 github simbody
SOFA rigid, soft, medical (todo) C++ LGPL-2.1 github sofa
Tiny Differentiable Simulator rigid (todo) C++, Python Apache-2.0 github google-research/tiny-differentiable-simulator
trep rigid dm, trj-opt C, Python GPL-3.0 github trep
qu3e rigid - C++ Zlib github qu3e
为简单起见,缩写名称用于表示支持的模型和功能,如下所示:
支持的型号
rigid: 刚体
soft: 软体
aero:空气动力学
granular: 颗粒状物质(如沙子)
fluid: fluid dynamics 流体动力学
vehicles 车辆
uav: 无人机(如无人机)
medical 医疗的
molecules 分子
parallel: 并联(如Stewart平台)
仿真,分析,计划,控制设计的功能Features on Simulation, Analysis, Planning, Control Design
dm: 离散力学
ik: 反向运动学求解器(请在此列表中找到IK专用软件包)
id: 逆动力学
slam: 同时定位和映射
trj-opt: 轨迹优化
plan: 运动规划算法
cv: 计算机视觉
urdf: urdf解析器
sdf: sdf解析器
Inverse Kinematics 逆运动学
IKBT-用于以符号形式解决机器人手臂逆运动学的python程序包[github uw-biorobotics / IKBT]
RelaxedIK-准确可行的机器人手臂运动的实时合成[github uwgraphics / relaxed_ik]
Machine Learning 机器学习
DLL-C ++的深度学习库(DLL)[github wichtounet / dll]
DyNet-动态神经网络工具包[github clab / dynet]
Fido-用于嵌入式电子和机器人技术的轻量级C ++机器学习库[github FidoProject / Fido]
MiniDNN-用于深度神经网络的仅标头C ++库[github yixuan / MiniDNN]
mlpack-可扩展的C ++机器学习库[github mlpack / mlpack]
OpenAI Gym-开发和比较强化学习算法[github体育馆]
Gym-dart [github dart-env]
gym-gazebo[github dart-env]
RLLib-强化学习中的时差学习算法[github samindaa / RLLib]
tiny-dnn-C ++ 14中仅标头,无依赖项的深度学习框架[github tiny-dnn / tiny-dnn]
Motion Planning and Control 运动规划与控制
AIKIDO-解决机器人运动规划和决策问题。 [github aikido]
CuiKSuite-解决位置分析和路径规划问题的应用程序
Control Toolbox-用于机器人技术,最优和模型预测控制的开源C ++库[github ethz-adrl / control-toolbox]
GPMP2-高斯过程运动规划器2 [github gtrll / gpmp2]
HPP-杂乱无章的环境中的运动链路径规划[github]
MoveIt! -运动规划框架[github moveit]
OMPL-开放运动规划库[bitbucket,github ompl]
pymanoid-基于OpenRAVE的人形机器人原型开发环境[github stephane-caron / pymanoid]
ROS Behavior Tree-[github miccol / ROS-Behavior-Tree]
Ruckig-Real-time,时间最佳且受加加速度限制的在线轨迹生成。 [github ruckig]
Kautham项目-用于运动规划的机器人仿真工具包[github kautham]
TOPP-RA-受到运动学和动态约束的时间参数化机器人轨迹[github_hungpham2511 / toppra]
Motion Optimizer 运动优化器
TopiCo-时间最优轨迹的生成和控制[github AIS-Bonn / TopiCo]
towr-一种基于特征的轻量级C ++库,用于腿部机器人的轨迹优化[github ethz-adrl / towr]
trajopt-通过局部优化生成机器人轨迹的框架[github joschu / trajopt]
最近邻
Cover-Tree-用于快速k最近邻搜索的Cover tree数据结构[github Cover-Tree]
Mike Izbicki等人,ICML 2015,报道了更快的覆盖树。
FLANN-近似最近邻居的快速库[github flann]
nanoflann-具有KD树的最近邻搜索[github nanoflann]
3D 映射
libpointmatcher-机器人技术中用于2-D / 3-D映射的迭代最近点库[github ethz-asl / libpointmatcher]
Octree-使用Octree的快速半径邻居搜索[github jbehley / octree]
OctoMap-基于Octrees的高效概率3D映射框架[github octomap]
PCL-2D / 3D图像和点云处理[github PointCloudLibrary / pcl]
voxblox-基于灵活的基于体素的映射,着重于截断的和欧几里得符号距离字段[github voxblox]
实用软件
Goxel-免费和开源3D体素编辑器[github guillaumechereau / goxel]
优化
CasADi-用于算法微分和数值优化的符号框架[github casadi]
Ceres Solver-大型非线性优化库[github ceres-solver]
eigen-qld-将QLD QP解算器与Eigen3库一起使用的接口[github jrl-umi3218 / eigen-qld]
EXOTica-机器人平台的通用优化工具集[github ipab-slmc / exotica]
hpipm-高性能内点方法QP求解器(Ipopt,Snopt)[github giaf / hpipm]
HYPRE-稀疏线性系统的并行求解器,具有多网格方法[github hypre-space / hypre]
ifopt-非线性编程求解器(Ipopt,Snopt)的基于特征的轻量级C ++接口[github ifopt]
Ipopt-大规模非线性优化库[github Ipopt]
libcmaes-使用CMA-ES算法的黑盒随机优化[github beniz / libcmaes]
limbo-黑盒函数的高斯过程和贝叶斯优化[github resibots / limbo]
lpsolvers-具有统一API的Python中的线性编程求解器[github lpsolvers]
NLopt-非线性优化[github nlopt]
OptimLib-非线性函数数值优化方法的轻型C ++库[github kthohr / optim]
Pagmo-用于大规模并行优化的科学库[github esa / pagmo2]
pymoo-Python中的多目标优化[github msu-coinlab / pymoo]
qpsolvers-具有统一API的Python二次编程求解器[github qpsolvers]
RobOptim-机器人的数值优化。 [github roboptim / roboptim-core]
SCS-解决大型凸锥问题的数值优化[github scs]
sferes2-进化计算[github sferes2 / sferes2]
机器人建模
机器人模型描述格式
SDF-描述机器人模拟器,可视化和控制的对象和环境的XML格式(bitbucket)
urdf-表示机器人模型的XML格式[github ros / urdfdom]
建立机器人模型的实用程序
phobos-Blender的附件,用于创建URDF和SMURF机器人模型[github phobos]
机器人平台
AutoRally-用于高级感知和控制研究的高性能测试平台[github autorally / autorally]
Linorobot-ROS兼容的地面机器人[github linorobot / linorobot]
onine-基于Linorobot和Braccio Arm的服务机器人[github grassjelly / onine]
Rock-机器人系统的软件框架
ROS-编写机器人软件的灵活框架[github repos]
ROS 2-机器人操作系统(ROS)软件堆栈的2.0版[github repos]
YARP-适用于从类人动物到嵌入式设备的通信和设备接口[github robotology / yarp]
SLAM
Cartographer-跨多个平台和传感器配置的2D和3D实时SLAM [github cartographer]
DSO-用于视觉里程表的新颖的直接和稀疏公式[github dso]
ElasticFusion-实时密集视觉SLAM系统[github ElasticFusion]
fiducials-使用基准标记同时进行定位和映射[github UbiquityRobotics / fiducials]
GTSAM-机器人技术和视觉中的平滑和贴图(SAM)[bitbucket]
Kintinuous-实时大规模密集视觉SLAM系统[github Kintinuous]
LSD-SLAM-实时单眼SLAM [github lsdslam]
ORB-SLAM2-用于单眼,立体声和RGB-D摄像机的实时SLAM库[github ORB_SLAM2]
RTAP-Map-基于全局贝叶斯闭环检测器的RGB-D Graph SLAM方法[github introlab / rtabmap]
SRBA-灵活解决相对子坐标下SLAM / BA的问题,适用于不同的子映射策略[github srba]
SLAM数据集
很棒的SLAM数据集 https://github.com/youngguncho/awesome-slam-datasets
视觉
ViSP-视觉伺服平台[github lagadic / visp]
流体
Fluid Engine Dev-Jet-用于计算机图形应用程序的流体模拟引擎[github doyubkim / fluid-engine-dev]
多物理场
Kratos-用于构建并行多学科仿真软件的框架[github KratosMultiphysics / Kratos]
数学
Fastor-C ++ 11/14/17中的轻量级高性能张量代数框架[github romeric / Fastor]
linalg.h-用于C ++ 11的单头文件公共域线性代数库[github sgorsten / linalg]
manif-用于Lie理论的小型c ++ 11仅限头文件的库。 [github artivis / manif]
Sophus-使用Eigen的李群库[github strasdat / Sophus]
SpaceVelAlg-具有Eigen3的空间矢量代数[github jrl-umi3218 / SpaceVecAlg]
等等
fuse-在机器人上实时执行传感器融合的通用体系结构[github locusrobotics / fuse]
Other Awesome Lists
Awesome Robotics (Kiloreux) https://github.com/Kiloreux/awesome-robotics
Awesome Robotics (ahundt) https://github.com/ahundt/awesome-robotics
Awesome Robotic Tooling https://github.com/Ly0n/awesome-robotic-tooling
Awesome Artificial Intelligence https://github.com/owainlewis/awesome-artificial-intelligence
Awesome Collision Detection https://github.com/jslee02/awesome-collision-detection
Awesome Computer Vision https://github.com/jbhuang0604/awesome-computer-vision
Awesome Machine Learning https://github.com/josephmisiti/awesome-machine-learning
Awesome Deep Learning github.com/ChristosChristofidis/awesome-deep-learning
Awesome Gazebo github.com/fkromer/awesome-gazebo
Awesome Grasping https://github.com/Po-Jen/awesome-grasping
Awesome Human Robot Interaction https://github.com/Po-Jen/awesome-human-robot-interaction
PythonRobotics - Python sample codes for robotics algorithms https://github.com/AtsushiSakai/PythonRobotics
Robotics Coursework - A list of robotics courses you can take online https://github.com/mithi/robotics-coursework
边栏推荐
- [solution] add multiple directories in different parts of the same word document
- A basic lintcode MySQL database problem
- Exness: Mercedes Benz's profits exceed expectations, and it is predicted that there will be a supply chain shortage in 2022
- 通过PHP 获取身份证相关信息 获取生肖,获取星座,获取年龄,获取性别
- NLP fourth paradigm: overview of prompt [pre train, prompt, predict] [Liu Pengfei]
- Win10 add file extension
- Regular expressions: examples (1)
- Unity learning notes -- 2D one-way platform production method
- Cadre du Paddle: aperçu du paddlelnp [bibliothèque de développement pour le traitement du langage naturel des rames volantes]
- Leetcode sum of two numbers
猜你喜欢
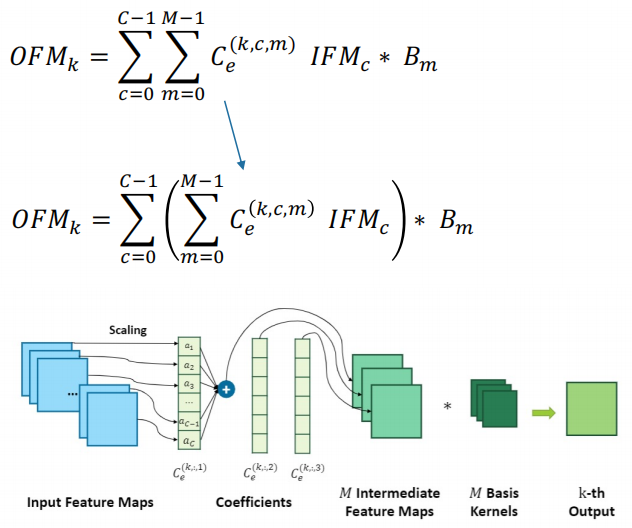
dried food! Accelerating sparse neural network through hardware and software co design
Leetcode3, implémenter strstr ()
Leetcode3. Implement strstr()
Blue Bridge Cup embedded_ STM32 learning_ Key_ Explain in detail

Know MySQL database
A basic lintcode MySQL database problem
【Flask】官方教程(Tutorial)-part2:蓝图-视图、模板、静态文件
Jisuanke - t2063_ Missile interception
安装php-zbarcode扩展时报错,不知道有没有哪位大神帮我解决一下呀 php 环境用的7.3
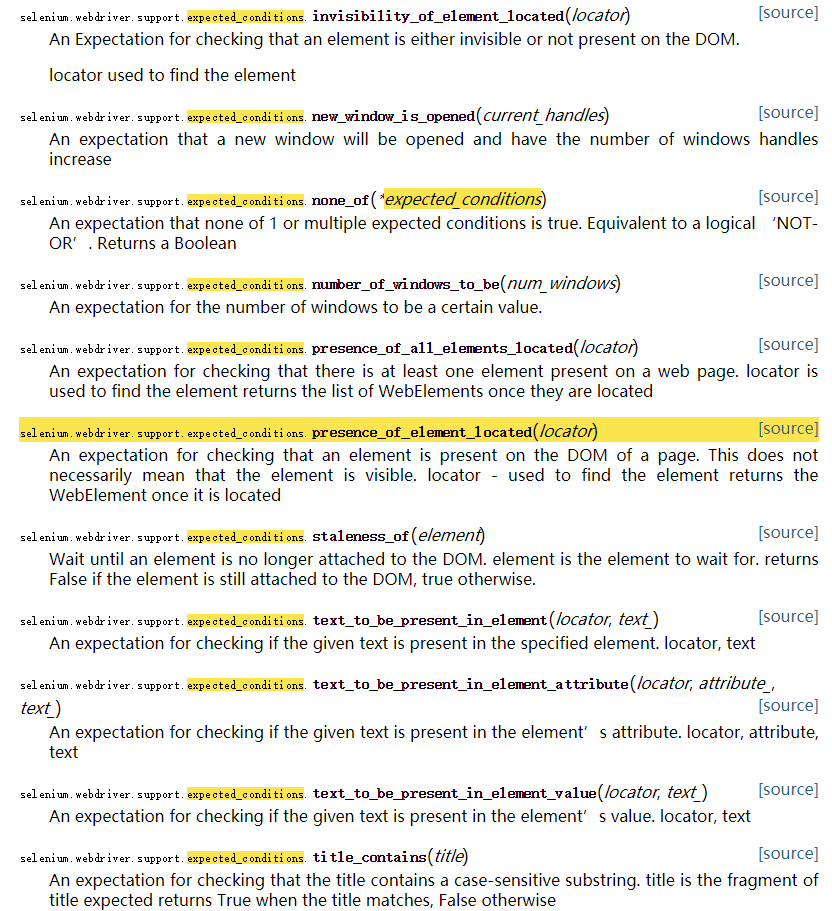
Selenium waiting mode
随机推荐
[flask] response, session and message flashing
Use image components to slide through photo albums and mobile phone photo album pages
Global and Chinese market of wheelchair climbing machines 2022-2028: Research Report on technology, participants, trends, market size and share
Mongodb problem set
【网络攻防实训习题】
PHP campus movie website system for computer graduation design
Pangolin Library: subgraph
Leetcode sum of two numbers
Xshell 7 Student Edition
[solution] every time idea starts, it will build project
VIM usage guide
Exness: Mercedes Benz's profits exceed expectations, and it is predicted that there will be a supply chain shortage in 2022
The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
RDD conversion operator of spark
阿裏測開面試題
【clickhouse】ClickHouse Practice in EOI
Kubernetes stateless application expansion and contraction capacity
Using SA token to solve websocket handshake authentication
TrueType字体文件提取关键信息
[flask] official tutorial -part2: Blueprint - view, template, static file