当前位置:网站首页>【Wing Loss】《Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks》
【Wing Loss】《Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks》
2022-07-02 07:45:00 【bryant_ meng】
CVPR-2018
List of articles
1 Background and Motivation
Key points of the face , Like the tip of the nose , Eye Center , For others such as face recognition / Facial recognition / 3D Face reconstruction and other face analysis tasks provide a wealth of geometric information
The development of deep learning has also greatly improved the face key point location task in unstructured face scenes
One crucial aspect of deep learning is to define a loss function leading to better-learnt representation from underlying data.
The author analyzes different loss Effect in face key point detection task , Put forward new losses wing loss
2 Related Work
- Different regressions are analyzed loss Advantages and disadvantages , Put forward wing loss For face key point location
- Put forward pose-based data balance
- Propose a new method of face key point detection Network structure
3 Advantages / Contributions
Network Architectures
Go straight back to
Forecast thermodynamic diagramDealing with Pose Variations
multiview models
use 3D face models
multi-task learning( Promote each other )Cascaded Networks
4 Method
1) Loss function
The loss functions commonly used in regression tasks are as follows
L1 / L2 / smooth L1
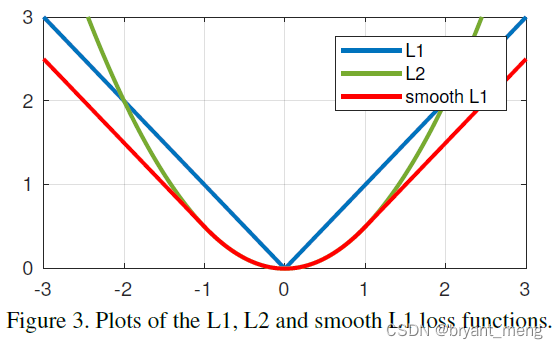
L2 loss is sensitive to outliers
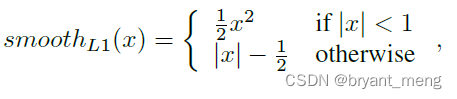
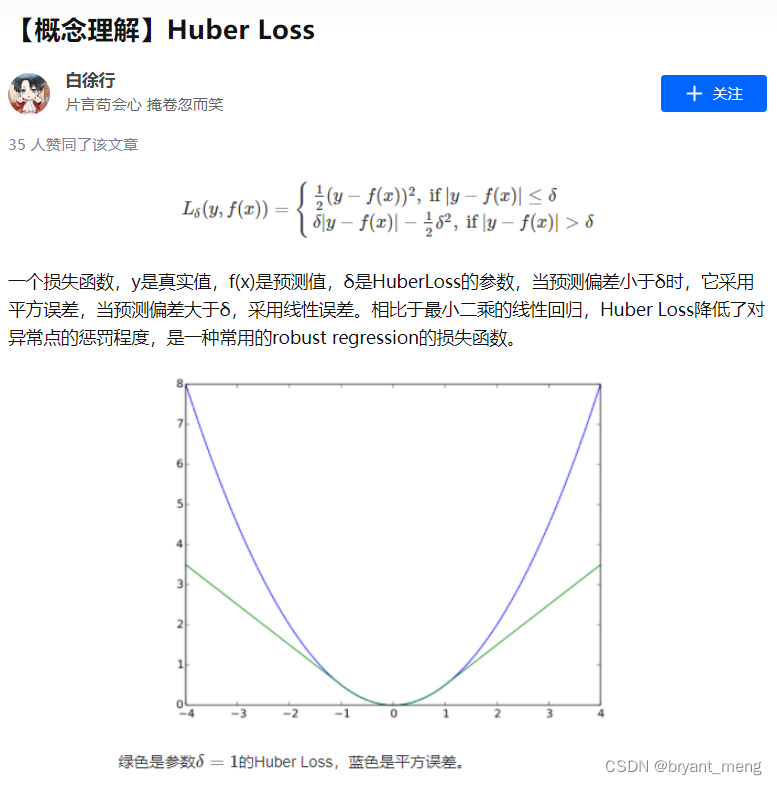
smooth L1 loss yes L1 and L2 The combination of , It's also a special case of the Huber loss
come from [ Face key point detection ] Wing loss Interpretation of the thesis

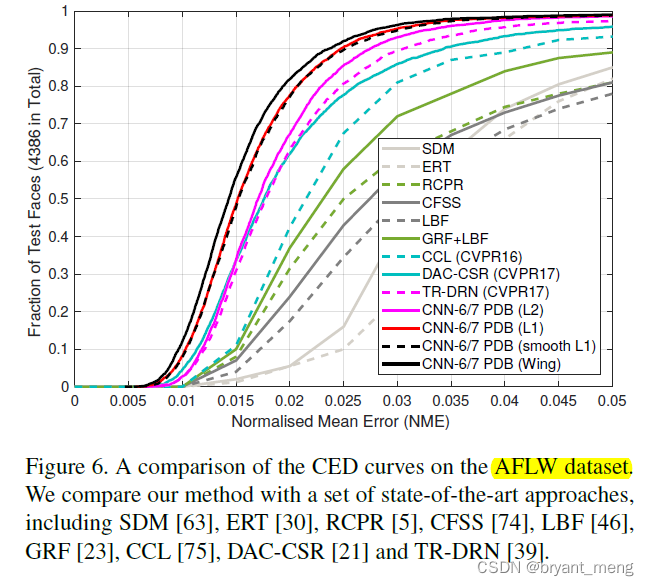
By analyzing AFLW On dataset NME(Normalised Mean Error) The cumulative distribution histogram of 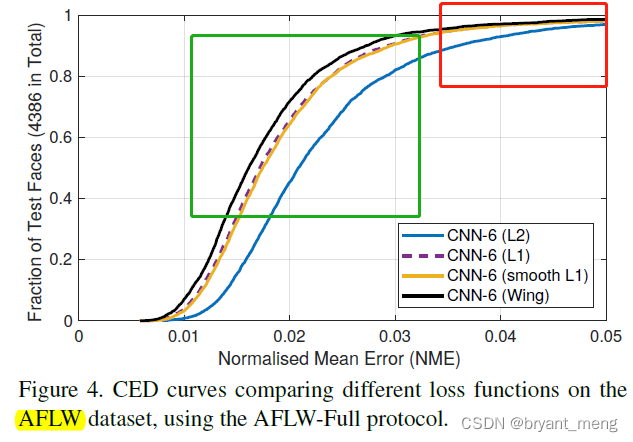
loss functions analysed in the last section(L1 / L2 / Smooth L1) perform well for large errors( That is, the roughly red framed area , Large error , But the corresponding samples are relatively few )
more attention should be paid to small and medium range errors( It's roughly a green framed area ,NME partial medium and small, There are many samples —— The curve is steep )
The author further analyzes
Error is x x x Under the circumstances
L1 The magnitude of the loss gradient is 1, Optimize step size (optimal step sizes) Then for x x x, The greater the error , The more optimization times
L2 The magnitude of the loss gradient is x x x, The optimization step is 1, The greater the error , The greater the gradient
In both cases the update towards the solution will be dominated by larger errors
That is to say ,it is hard to correct relatively small displacements
The author introduces ln x x x loss To alleviate the above L1 / L2 loss The disadvantage of being too affected by large errors ,
ln x x x Gradient magnitude 1 x \frac{1}{x} x1, The optimization step is x 2 x^2 x2, Small error when , Big gradient Small steps , Big error when , Small gradient Large step size
For large error and small error scenarios , Both gradient and step size have a good equilibrium
Considering the large initial error of face key point location task , To speed up convergence , The author introduces L1 loss(L2 Yes outline sensitive ), The overall design is as follows

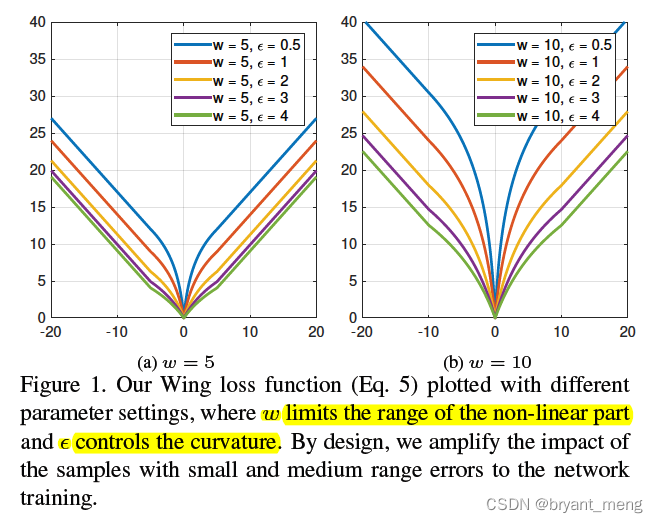
C = w − w l n ( 1 + ∣ w ∣ / ε ) C = w - wln(1+|w|/\varepsilon ) C=w−wln(1+∣w∣/ε) Constant , Ensure the smoothness of the piecewise function
ε \varepsilon ε It should not be set too small , According to the gradient − w ε + x -\frac{w}{\varepsilon+x} −ε+xw It can be seen that , ε \varepsilon ε After hours , In the face of small errors , There may be a gradient explosion
2)Pose-based data balancing
In order to solve extreme pose variations
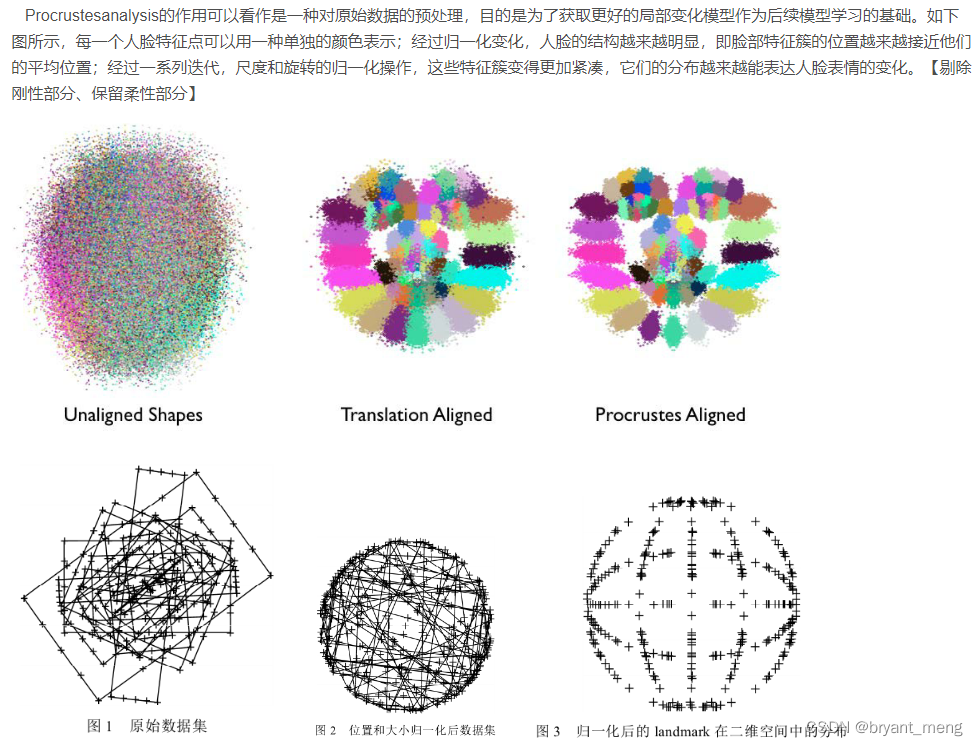
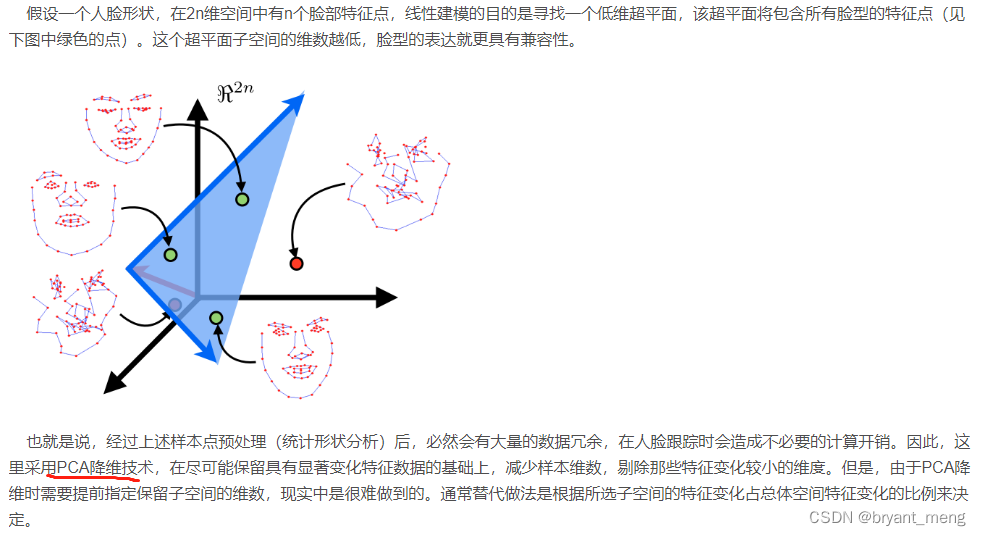
Procrustes Analysis + PAC To analyze the shape distribution of faces in the dataset
Principle comes from 《Master Opencv… Reading notes 》 Non rigid face tracking II

The distribution of projection coefficient of the training samples is represented by a histogram with K bins give the result as follows

Abscissa face angle , Number of ordinate samples
Pose-based data balancing The strategy is to put bin Face samples corresponding to relatively few positions , Repeat sampling , Make it more balanced
3) Network structure 
A focus on loss And sample strategy , The design of network structure is relatively simple
Pose-based data balancing Relieved out-of-plane head rotations problem
There are other factors that affect the final face key point location
in-plane head rotations and inaccurate bounding boxes output from a poor face detector etc.
So the author cascade For a moment
The first stage CNN6, Input 64x64x3, Output keys + Refined offset of face frame ?(refine the input image for the second network by removing the in-plane head rotation and correcting the bounding box, I can't see too much information )
The first stage CNN7, Input 128x127x3, Output keys
5 Experiments
5.1 Datasets and Metrics
AFLW:19 A little bit ,AFLW protocol The evaluation index ——NME + Face frame width
300W:68 A little bit ,NME + inter-pupil distance
5.2 Experiments
1)loss
AFLW On dataset , Different loss Comparison 
Explore the next wing loss in w w w and ε \varepsilon ε Setting of super parameters 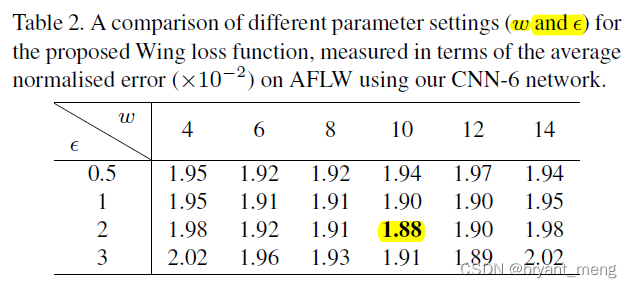
2)Pose-based data balancing Strategy

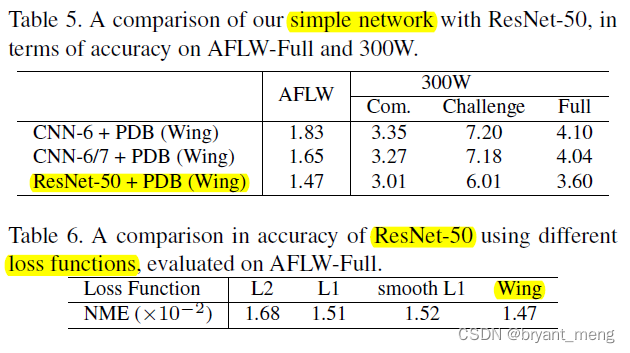
Even if CNN coordination L1 and L2 loss, Also super fierce , explain Pose-based data balancing The strategy is very effective
300W
3)Run time and network architectures

6 Conclusion(own) / Future work
CNN6 What is the output of , Ha ha ha ! I have to check the code
wing loss, chart 4 Is the core source of inspiration
Pose-based data balancing
Angle definition :
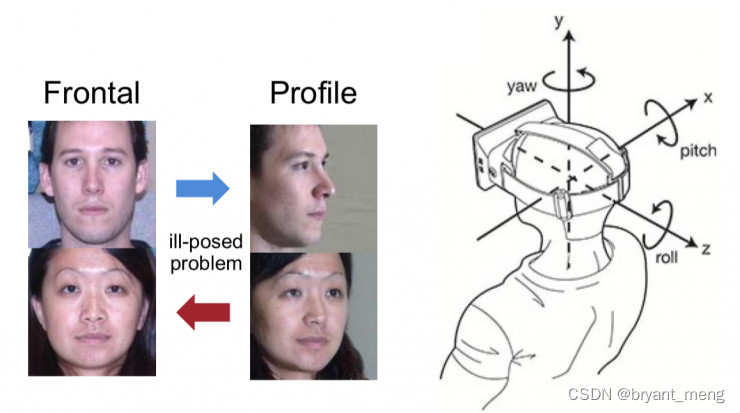
The picture is from How to rotate the face in the image ? | CVPR 2018in-plane / out-of-plane, Quote the following two answers
It should be that stress or deformation occurs in a xoy In the plane , Call in-plane, Yes z The component force or displacement of the direction is called out-of-plane
Deformation is relative to a plane , There are some deformations in this plane , Some deformations are out of plane deformations , That's the corresponding in-plane and out-of-plane
Learn others' understanding
边栏推荐
- 【MnasNet】《MnasNet:Platform-Aware Neural Architecture Search for Mobile》
- [mixup] mixup: Beyond Imperial Risk Minimization
- Calculate the total in the tree structure data in PHP
- parser. parse_ Args boolean type resolves false to true
- [CVPR‘22 Oral2] TAN: Temporal Alignment Networks for Long-term Video
- Conversion of numerical amount into capital figures in PHP
- 【Programming】
- [introduction to information retrieval] Chapter 6 term weight and vector space model
- Installation and use of image data crawling tool Image Downloader
- Thesis tips
猜你喜欢
TimeCLR: A self-supervised contrastive learning framework for univariate time series representation
Cognitive science popularization of middle-aged people
![[mixup] mixup: Beyond Imperial Risk Minimization](/img/14/8d6a76b79a2317fa619e6b7bf87f88.png)
[mixup] mixup: Beyond Imperial Risk Minimization

Machine learning theory learning: perceptron

Regular expressions in MySQL
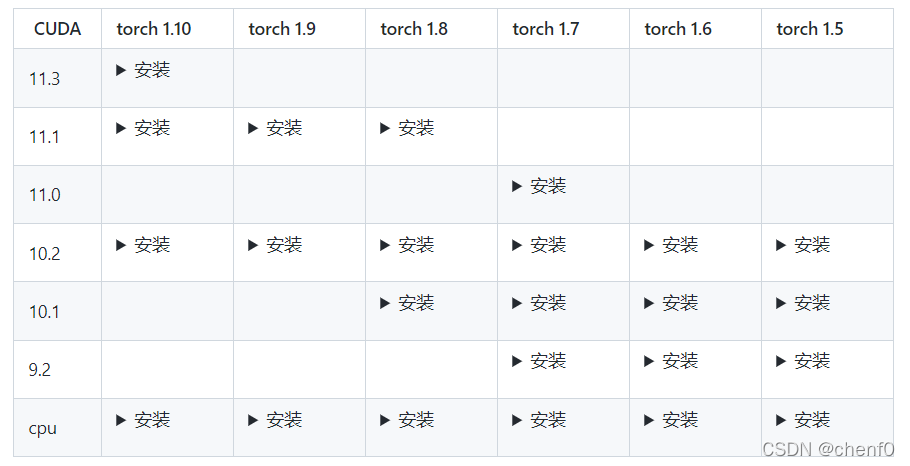
MMDetection安装问题
Execution of procedures
Play online games with mame32k

【FastDepth】《FastDepth:Fast Monocular Depth Estimation on Embedded Systems》

SSM personnel management system
随机推荐
[torch] some ideas to solve the problem that the tensor parameters have gradients and the weight is not updated
[torch] the most concise logging User Guide
Thesis tips
Implement interface Iterable & lt; T>
Drawing mechanism of view (3)
CONDA common commands
Semi supervised mixpatch
基于pytorch的YOLOv5单张图片检测实现
【Random Erasing】《Random Erasing Data Augmentation》
Play online games with mame32k
Timeout docking video generation
解决latex图片浮动的问题
MySQL has no collation factor of order by
深度学习分类优化实战
Transform the tree structure into array in PHP (flatten the tree structure and keep the sorting of upper and lower levels)
使用百度网盘上传数据到服务器上
Traditional target detection notes 1__ Viola Jones
Common machine learning related evaluation indicators
【MnasNet】《MnasNet:Platform-Aware Neural Architecture Search for Mobile》
Implementation of yolov5 single image detection based on onnxruntime