当前位置:网站首页>21.PWM应用编程
21.PWM应用编程
2022-07-05 23:08:00 【anieoo】
一、PWM操作介绍
PWM,脉宽调制技术的编程方法和LED类设备一样可以通过sysfs虚拟文件系统控制。进入到目录/sys/class/pwm目录下:

其中每个pwmchipx对应于一个pwm控制器,进入pwmchip0文件:

npwm: 这是一个只读属性,读取该文件可以得知该 PWM 控制器下共有几路 PWM 输出,如下所
示:

可以看出I.MX6ULL每个PWM控制器对应的只有一路输出。export: 与 GPIO 控制一样,在使用 PWM 之前,也需要将其导出,通过 export 属性进行导出。unexport: 将导出的 PWM 删除。当使用完 PWM 之后,我们需要将导出的 PWM 删除。
enable: 可读可写,写入"0"表示禁止 PWM;写入"1"表示使能 PWM。读取该文件获取 PWM 当前是禁止还是使能状态。
polarity: 用于设置极性,可读可写,可写入的值如:"normal":普通;"inversed":反转;period: 用于配置 PWM 周期, 可读可写;写入一个字符串数字值,以 ns(纳秒)为单位
duty_cycle: 用于配置 PWM 的占空比, 可读可写;写入一个字符串数字值, 同样也是以 ns 为单位。
二、编写应用操作
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
static char pwm_path[100];
static int pwm_config(const char *attr, const char *val) //配置PWM
{
char file_path[100];
int len;
int fd;
sprintf(file_path, "%s/%s", pwm_path, attr);
if (0 > (fd = open(file_path, O_WRONLY))) {
perror("open error");
return fd;
}
len = strlen(val);
if (len != write(fd, val, len)) {
perror("write error");
close(fd);
return -1;
}
close(fd); //关闭文件
return 0;
}
int main(int argc, char *argv[])
{
/* 校验传参 */
if (4 != argc) {
fprintf(stderr, "usage: %s <id> <period> <duty>\n",
argv[0]);
exit(-1);
}
/* 打印配置信息 */
printf("PWM config: id<%s>, period<%s>, duty<%s>\n",
argv[1], argv[2],
argv[3]);
/* 导出 pwm */
sprintf(pwm_path, "/sys/class/pwm/pwmchip%s/pwm0", argv[1]);
if (access(pwm_path, F_OK)) {//如果 pwm0 目录不存在, 则导出
char temp[100];
int fd;
sprintf(temp, "/sys/class/pwm/pwmchip%s/export", argv[1]);
if (0 > (fd = open(temp, O_WRONLY))) {
perror("open error");
exit(-1);
}
if (1 != write(fd, "0", 1)) {//导出 pwm
perror("write error");
close(fd);
exit(-1);
}
close(fd); //关闭文件
}
/* 配置 PWM 周期 */
if (pwm_config("period", argv[2]))
exit(-1);
/* 配置占空比 */
if (pwm_config("duty_cycle", argv[3]))
exit(-1);
/* 使能 pwm */
pwm_config("enable", "1");
/* 退出程序 */
exit(0);
}边栏推荐
- (4)UART應用設計及仿真驗證2 —— TX模塊設計(無狀態機)
- Spécifications techniques et lignes directrices pour la sélection des tubes TVS et ESD - Recommandation de jialichuang
- Three. Js-01 getting started
- 98. Verify the binary search tree ●●
- Multi camera stereo calibration
- poj 2762 Going from u to v or from v to u? (推断它是否是一个薄弱环节图)
- 东南亚电商指南,卖家如何布局东南亚市场?
- Latex multiple linebreaks
- Multi sensor fusion of imu/ electronic compass / wheel encoder (Kalman filter)
- When to use useImperativeHandle, useLayoutEffect, and useDebugValue
猜你喜欢
数据库基础知识(面试)

Non rigid / flexible point cloud ICP registration
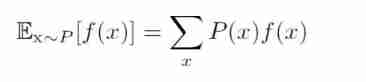
Expectation, variance and covariance
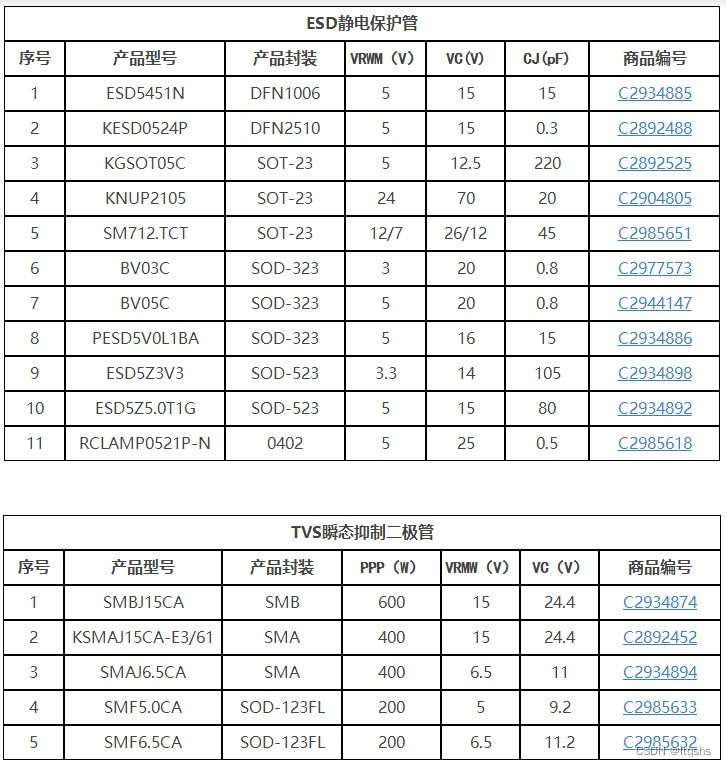
Technical specifications and model selection guidelines for TVs tubes and ESD tubes - recommended by jialichuang
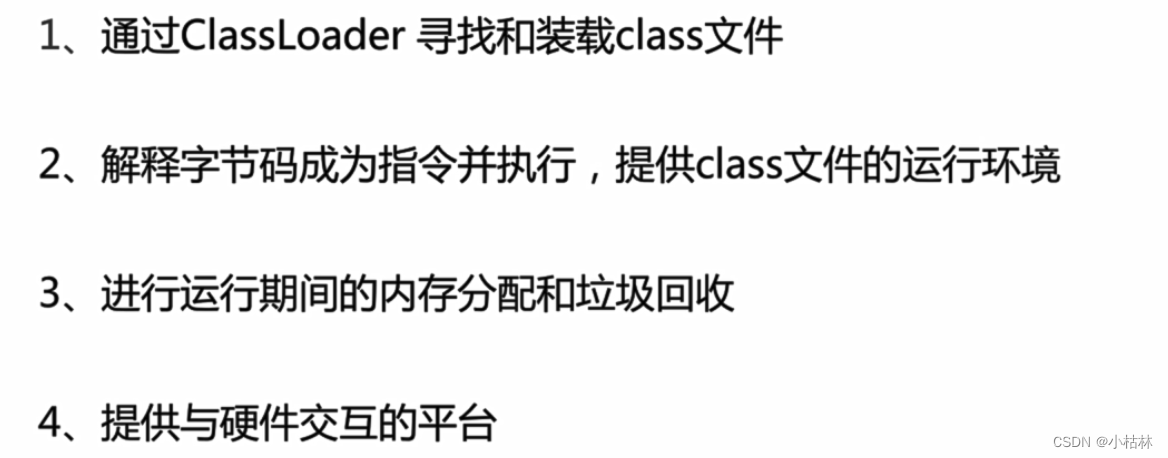
2: Chapter 1: understanding JVM specification 1: introduction to JVM;
Selenium+pytest automated test framework practice

Three. JS VR house viewing
The PNG image is normal when LabVIEW is opened, and the full black image is obtained when Photoshop is opened
CorelDRAW plug-in -- GMS plug-in development -- new project -- macro recording -- VBA editing -- debugging skills -- CDR plug-in (2)
Getting started stm32--gpio (running lantern) (nanny level)
随机推荐
[Yu Yue education] NC machining technology reference materials of Shaanxi University of science and technology
2.13 summary
Naoqi robot summary 26
Hainan Nuanshen tea recruits warmhearted people: recruitment of the product experience recommender of Nuanshen multi bubble honey orchid single cluster
(4)UART应用设计及仿真验证2 —— TX模块设计(无状态机)
golang代码检查工具
Neural structured learning - Part 2: training with natural graphs
Expectation, variance and covariance
Leetcode buys and sells stocks
东南亚电商指南,卖家如何布局东南亚市场?
代码农民提高生产力
Hj16 shopping list
14种神笔记方法,只需选择1招,让你的学习和工作效率提高100倍!
Calculating the number of daffodils in C language
TVS管和ESD管的技术指标和选型指南-嘉立创推荐
两数之和、三数之和(排序+双指针)
Judge whether the binary tree is a complete binary tree
Media query: importing resources
11gR2 Database Services for &quot; Policy&quot; and &quot; Administrator&quot; Managed databases (file I
(4) UART application design and simulation verification 2 - TX module design (stateless machine)