当前位置:网站首页>Dynamic global memory allocation and operation in CUDA
Dynamic global memory allocation and operation in CUDA
2022-07-02 06:28:00 【Little Heshang sweeping the floor】
Dynamic Global Memory Allocation and Operations
Dynamic global memory allocation and operation are only affected by computing power 2.x And later device support .
__host__ __device__ void* malloc(size_t size);
__device__ void *__nv_aligned_device_malloc(size_t size, size_t align);
__host__ __device__ void free(void* ptr);
Dynamically allocate and free memory from a fixed size heap in global memory .
__host__ __device__ void* memcpy(void* dest, const void* src, size_t size);
from src Copy the memory location pointed to size Byte to dest Point to memory location .
__host__ __device__ void* memset(void* ptr, int value, size_t size);
take ptr Of the memory block pointed to size The byte is set to value( Interpreted as an unsigned character ).
CUDA Kernel malloc() Function allocates at least size Bytes , And returns a pointer to the allocated memory , If there is not enough memory to satisfy the request , Then return to NULL. The returned pointer is guaranteed to be the same as 16 Byte boundary alignment .
Kernel CUDA __nv_aligned_device_malloc() Function allocates at least size Bytes , And returns a pointer to the allocated memory , If memory is insufficient to meet the requested size or alignment , Then return to NULL. The address to allocate memory will be align Multiple . align Must be 2 The nonzero power of .
CUDA Kernel free() Function to release ptr Memory pointed to , This memory must be previously paired malloc() or __nv_aligned_device_malloc() The call to return . If ptr by NULL, Ignore the right free() Call to . Use the same ptr Repeated calls to free() Have undefined behavior .
Given CUDA Threads pass through malloc() or __nv_aligned_device_malloc() The allocated memory is CUDA The context remains allocated throughout its lifecycle , Or until you call free() Explicit release . It can be used by any other CUDA Thread usage , This is true even when the subsequent kernel starts . whatever CUDA A thread can release the memory allocated by another thread , However, care should be taken to ensure that the same pointer is not released multiple times .
1. Heap Memory Allocation
The device memory heap has a fixed size , Must be used in any malloc()、__nv_aligned_device_malloc() or free() Specify the size before loading the program into the context . If any program uses without specifying the heap size malloc() or __nv_aligned_device_malloc() , Will be assigned 8 MB Default heap for .
following API Function to get and set the heap size :
cudaDeviceGetLimit(size_t* size, cudaLimitMallocHeapSize)cudaDeviceSetLimit(cudaLimitMallocHeapSize, size_t size)
The granted heap size is at least size Bytes . cuCtxGetLimit() and cudaDeviceGetLimit() Returns the current requested heap size .
When the module is loaded into the context , The actual memory allocation of the heap occurs , Or explicitly through CUDA The driver API( See modular ), Or implicitly through CUDA Runtime API( See CUDA Runtime ). If memory allocation fails , Module loading will produce CUDA_ERROR_SHARED_OBJECT_INIT_FAILED error .
Once module loading occurs , The heap size cannot be changed , And it will not dynamically resize as needed .
Except through the host side CUDA API call ( for example cudaMalloc()) Allocated outside the memory reserved for the device heap .
2. Interoperability with Host Memory API
Through the equipment malloc() or __nv_aligned_device_malloc() The allocated memory cannot be released by the runtime ( namely , By calling any free memory function from device memory ).
Again , Memory allocated by runtime ( namely , By calling any memory allocation function from device memory ) Cannot pass free() Release .
Besides , Call in device code malloc() or __nv_aligned_device_malloc() The allocated memory cannot be used for any runtime or driver API call ( namely cudaMemcpy、cudaMemset etc. ).
3. Examples
3.1. Per Thread Allocation
#include <stdlib.h>
#include <stdio.h>
__global__ void mallocTest()
{
size_t size = 123;
char* ptr = (char*)malloc(size);
memset(ptr, 0, size);
printf("Thread %d got pointer: %p\n", threadIdx.x, ptr);
free(ptr);
}
int main()
{
// Set a heap size of 128 megabytes. Note that this must
// be done before any kernel is launched.
cudaDeviceSetLimit(cudaLimitMallocHeapSize, 128*1024*1024);
mallocTest<<<1, 5>>>();
cudaDeviceSynchronize();
return 0;
}
The above code will output :
Thread 0 got pointer: 00057020
Thread 1 got pointer: 0005708c
Thread 2 got pointer: 000570f8
Thread 3 got pointer: 00057164
Thread 4 got pointer: 000571d0
Notice how each thread encounters malloc() and memset() command , So as to receive and initialize their own assignments . ( The exact pointer value will vary : These are illustrative .)
3.2. Per Thread Block Allocation
#include <stdlib.h>
__global__ void mallocTest()
{
__shared__ int* data;
// The first thread in the block does the allocation and then
// shares the pointer with all other threads through shared memory,
// so that access can easily be coalesced.
// 64 bytes per thread are allocated.
if (threadIdx.x == 0) {
size_t size = blockDim.x * 64;
data = (int*)malloc(size);
}
__syncthreads();
// Check for failure
if (data == NULL)
return;
// Threads index into the memory, ensuring coalescence
int* ptr = data;
for (int i = 0; i < 64; ++i)
ptr[i * blockDim.x + threadIdx.x] = threadIdx.x;
// Ensure all threads complete before freeing
__syncthreads();
// Only one thread may free the memory!
if (threadIdx.x == 0)
free(data);
}
int main()
{
cudaDeviceSetLimit(cudaLimitMallocHeapSize, 128*1024*1024);
mallocTest<<<10, 128>>>();
cudaDeviceSynchronize();
return 0;
}
3.3. Allocation Persisting Between Kernel Launches
#include <stdlib.h>
#include <stdio.h>
#define NUM_BLOCKS 20
__device__ int* dataptr[NUM_BLOCKS]; // Per-block pointer
__global__ void allocmem()
{
// Only the first thread in the block does the allocation
// since we want only one allocation per block.
if (threadIdx.x == 0)
dataptr[blockIdx.x] = (int*)malloc(blockDim.x * 4);
__syncthreads();
// Check for failure
if (dataptr[blockIdx.x] == NULL)
return;
// Zero the data with all threads in parallel
dataptr[blockIdx.x][threadIdx.x] = 0;
}
// Simple example: store thread ID into each element
__global__ void usemem()
{
int* ptr = dataptr[blockIdx.x];
if (ptr != NULL)
ptr[threadIdx.x] += threadIdx.x;
}
// Print the content of the buffer before freeing it
__global__ void freemem()
{
int* ptr = dataptr[blockIdx.x];
if (ptr != NULL)
printf("Block %d, Thread %d: final value = %d\n",
blockIdx.x, threadIdx.x, ptr[threadIdx.x]);
// Only free from one thread!
if (threadIdx.x == 0)
free(ptr);
}
int main()
{
cudaDeviceSetLimit(cudaLimitMallocHeapSize, 128*1024*1024);
// Allocate memory
allocmem<<< NUM_BLOCKS, 10 >>>();
// Use memory
usemem<<< NUM_BLOCKS, 10 >>>();
usemem<<< NUM_BLOCKS, 10 >>>();
usemem<<< NUM_BLOCKS, 10 >>>();
// Free memory
freemem<<< NUM_BLOCKS, 10 >>>();
cudaDeviceSynchronize();
return 0;
}
边栏推荐
- AtCoder Beginner Contest 253 F - Operations on a Matrix // 树状数组
- Sudo right raising
- VLAN experiment of switching technology
- FE - Eggjs 结合 Typeorm 出现连接不了数据库
- 华为MindSpore开源实习机试题
- TensorRT中的循环
- LeetCode 83. Delete duplicate elements in the sorting linked list
- CUDA中的存储空间修饰符
- LeetCode 77. combination
- CUDA and Direct3D consistency
猜你喜欢

Detailed explanation of BGP message
IDEA公布全新默认UI,太清爽了(内含申请链接)

Detailed definition of tensorrt data format

sudo提权

New version of dedecms collection and release plug-in tutorial tool

Support new and old imperial CMS collection and warehousing tutorials
Common means of modeling: combination

FE - 微信小程序 - 蓝牙 BLE 开发调研与使用
深入了解JUC并发(二)并发理论
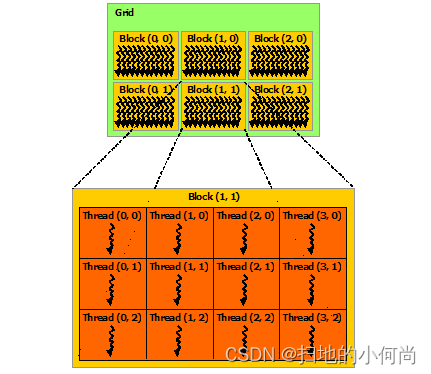
CUDA中的线程层次
随机推荐
New version of dedecms collection and release plug-in tutorial tool
sudo提权
Redis---1. Data structure characteristics and operation
Redis - hot key issues
程序员的自我修养—找工作反思篇
CUDA中的存储空间修饰符
栈(线性结构)
Does the assignment of Boolean types such as tag attribute disabled selected checked not take effect?
CUDA中的Warp matrix functions
Data science [viii]: SVD (I)
AWD学习
深入了解JUC并发(一)什么是JUC
Sublime Text 配置php编译环境
Browser principle mind map
FE - weex 开发 之 使用 weex-ui 组件与配置使用
Redis——热点key问题
数据科学【九】:SVD(二)
ModuleNotFoundError: No module named ‘jieba.analyse‘; ‘jieba‘ is not a package
深入学习JVM底层(五):类加载机制
深入学习JVM底层(二):HotSpot虚拟机对象