当前位置:网站首页>Introduction to modern control theory + understanding
Introduction to modern control theory + understanding
2022-07-04 14:49:00 【Pony Baby】
I think you have learned the theory of automatic control ( What is written at the back of this article is very casual )
The state space
We can consider controlling the vehicle ( We assume that they are all linear systems ), Our input has a steering wheel , throttle , Brake, etc . Our output has speed 、 The acceleration 、 angle 、 Angular velocity and other information . If it is automatic control theory , We build transfer functions for each input and output , Then analysis . It's troublesome , And not systematic .
Before entering modern control theory , A very important point is , We need to take Clarify the relationship between output and state . The speed we mentioned earlier 、 The acceleration 、 angle 、 Angular velocity is actually the state of the system , What we want to control is the state . Output is only a representation . It's like adding acceleration and speed together to output , Then reduce the speed and speed to output , It doesn't make any sense . But it can also restore the state of the system . The output just uses the sensor to show the state . State is something more essential than output .
therefore , We need to be more systematic 、 More essentially, it reflects The whole picture of the system , Modern control theory is coming .
What is state space :
A car moving in a straight line , x = [ r , r ˙ , r ¨ ] T x=[r,\dot r,\ddot r]^T x=[r,r˙,r¨]T The three states are position , Speed , The acceleration . These three quantities are enough to indicate the complete state of the car . And the possible assignment of all States , The space formed is the state space , If you add the direction of state change, it will form site , This is another story .
The following is what you will see when you first learn to control , Let me help you understand :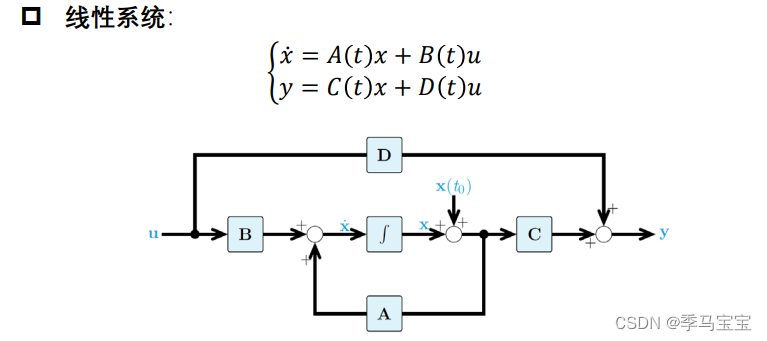
x x x Is the current state , u u u It's input , x ˙ \dot x x˙ Is the rate of change of state , The three constitute a differential equation . In discrete form, it will become x ( n ) = A x ( n − 1 ) + B x ( n − 1 ) x(n)=Ax(n-1)+Bx(n-1) x(n)=Ax(n−1)+Bx(n−1), Is it easier to understand , Namely Adding input to the current state will make the next state look like .
The second line y y y Indicative output , The expression is in the current state and input , What results will you output ( What value will your sensor detect ), Generally speaking D=0, Output is the reaction of state .
It's important : State space representation is not unique , This is actually obvious , You can take x = [ x 1 , x 2 ] T x=[x1,x2]^T x=[x1,x2]T become x = [ x 1 − x 2 , x 1 + x 2 ] T x=[x1-x2,x1+x2]^T x=[x1−x2,x1+x2]T, Through the previous state variables, we can calculate the following , The back one can also calculate the front one . The concrete manifestation is like this .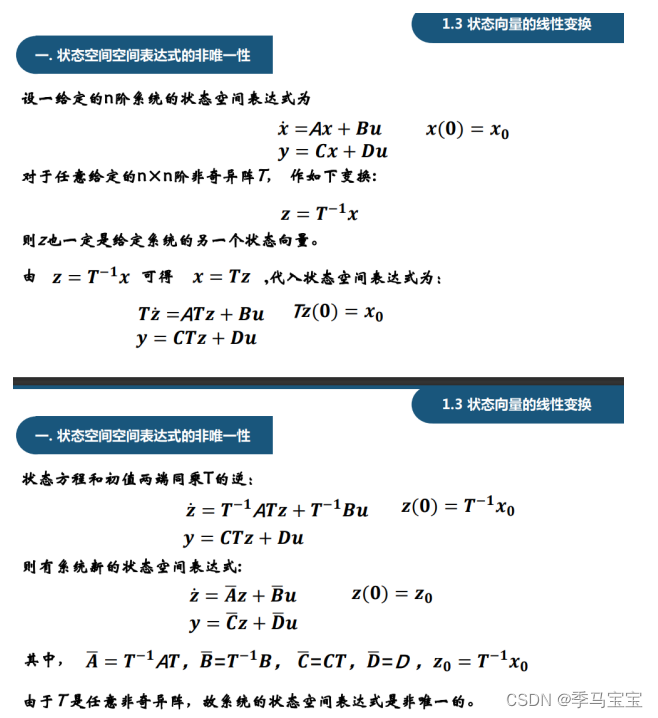
The next step will generally be how to write a state space expression according to the transfer function , Or vice versa , I won't even talk about it .
State space solution
Too lazy to write. . Let's learn how to solve it by ourselves
stability
Self control is BIBO( Bounded input , Bounded output ). The current control is different , Is to add a disturbance to a certain state , Can return to this state ( More specifically, you can take a look at this Lyapunov stability judgment )
Too lazy to write. , later .
边栏推荐
- Node mongodb installation
- LVGL 8.2 keyboard
- Query optimizer for SQL optimization
- Count the running time of PHP program and set the maximum running time of PHP
- 關於miui12.5 紅米k20pro用au或者povo2出現問題的解决辦法
- 如何配和弦
- 局部修改-渐进型开发
- Docker compose public network deployment redis sentinel mode
- LeetCode 1200 最小絕對差[排序] HERODING的LeetCode之路
- Solutions aux problèmes d'utilisation de l'au ou du povo 2 dans le riz rouge k20pro MIUI 12.5
猜你喜欢

What is the difference between Bi financial analysis in a narrow sense and financial analysis in a broad sense?

潘多拉 IOT 开发板学习(RT-Thread)—— 实验3 按键实验(学习笔记)
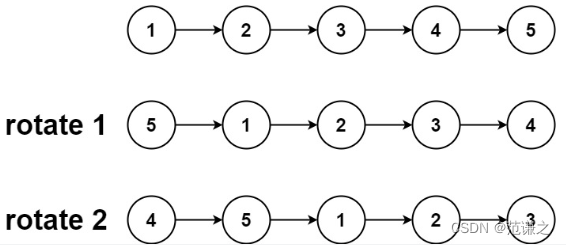
Leetcode 61: rotating linked list
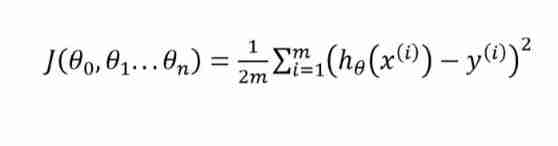
Five minutes per day machine learning: use gradient descent to complete the fitting of multi feature linear regression model

Digi XBee 3 rf: 4 protocols, 3 packages, 10 major functions
Is BigDecimal safe to calculate the amount? Look at these five pits~~
scratch古堡历险记 电子学会图形化编程scratch等级考试三级真题和答案解析2022年6月
Kubernets pod exists finalizers are always in terminating state

Free, easy-to-use, powerful lightweight note taking software evaluation: drafts, apple memo, flomo, keep, flowus, agenda, sidenote, workflow
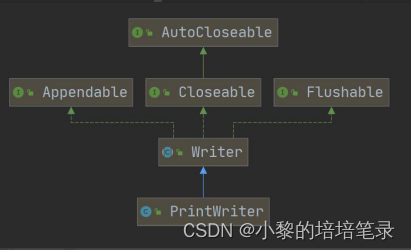
IO flow: node flow and processing flow are summarized in detail.
随机推荐
【C语言】指针笔试题
Leetcode t47: full arrangement II
關於miui12.5 紅米k20pro用au或者povo2出現問題的解决辦法
Leetcode t49: grouping of alphabetic words
Kubernets Pod 存在 Finalizers 一直处于 Terminating 状态
Opencv3.2 and opencv2.4 installation
Ranking list of databases in July: mongodb and Oracle scores fell the most
Leetcode 1200 minimum absolute difference [sort] The Path of leetcode for heroding
SAIC Maxus officially released its new brand "mifa", and its flagship product mifa 9 was officially unveiled!
LVGL 8.2 LED
LVLG 8.2 circular scrolling animation of a label
Programmer turns direction
开发中常见问题总结
如何配和弦
毕业季-个人总结
Programmers exposed that they took private jobs: they took more than 30 orders in 10 months, with a net income of 400000
leetcode:6110. The number of incremental paths in the grid graph [DFS + cache]
[information retrieval] link analysis
信号处理之一阶RC低通滤波器宏指令实现(繁易触摸屏)
How to match chords