当前位置:网站首页>Principles of several common IO models
Principles of several common IO models
2022-07-03 15:40:00 【51CTO】
1、 Server side I/O cheng
I/O In a computer, it means Input/Output, IOPS (Input/Output Per Second) That is, the input and output per second ( Or reading and writing times ), Is one of the main indicators of disk performance .IOPS It refers to what the system can handle in unit time I/O Number of requests , It's usually processed per second I/O The requested quantity is in ,I/O Requests are usually read or write data operation requests .
Once complete I/O It is the complete exchange of message between process data in user space and kernel data in kernel space , But because kernel space is strictly isolated from user space , Therefore, in the process of data exchange, the process of user space cannot directly call the memory data of kernel space , It's about going through memory data from kernel space copy To the process memory in user space , So in a nutshell I/O Is to copy the data from the memory data in kernel space to the memory of the process in user space .
Linux Of I/O
- disk I/O
- The Internet I/O : Everything is a document , The essence is right socket Reading and writing of documents
1.1、 disk I/O
disk I/O It is a process that initiates a system call to the kernel , Request a resource on the disk, such as html File or picture , Then the kernel loads the target file into the kernel memory space through the corresponding driver , After loading, copy the data from kernel memory to process memory , If it is a relatively large data, it also needs to wait time .
1.2、 The Internet I/O
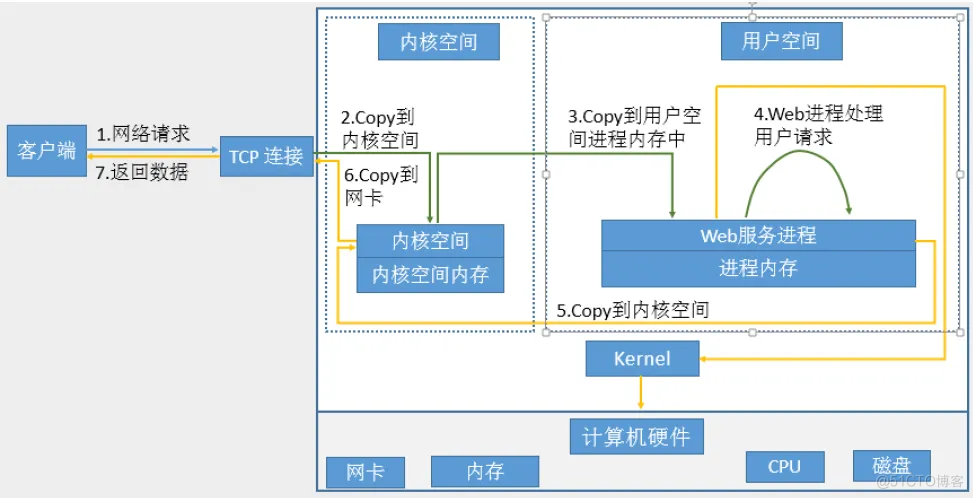
The Internet I/O Treatment process
Regardless of disk or network I/O
2、I/O Model
2.1、 System I/O Model
Sync / asynchronous : Focus on the message communication mechanism , That is, when the caller is waiting for the processing structure of something , Whether the callee provides notification of completion status .
- Sync :synchronous, The callee does not provide notification messages related to the processing results of the event , The caller needs to actively ask whether the processing is completed .
- asynchronous :asynchronous, The callee passes through the State 、 The notification or callback mechanism actively notifies the caller of the running state of the callee .

Blocking / Non blocking : Focus on the state of the caller before waiting for the result to return
- Blocking :blocking, finger IO Operation needs to be completed completely before returning to user space , Before the call result returns , The caller is suspended , I can't do anything else .
- Non blocking :nonblocking, finger IO A status value is returned to the user immediately after the operation is called , Without waiting for IO Operation complete , Before the final call result is returned , The caller will not be suspended , You can do something else .
System I/O The model combination :
2.2、 The Internet I/O Model
2.2.1、 Blocking type I/O Model (blocking IO)

Blocking IO The model is the simplest I/O Model , User thread in kernel IO Blocked during operation
User thread through system call read launch I/O Read operations , From user space to kernel space . The kernel waits until the packet arrives , Then copy the received data to user space , complete read operation
Users need to wait read Read the data to buffer after , To continue processing received data . Whole I/O During request , User threads are blocked , This causes the user to initiate IO When asked , Can't do anything , Yes CPU The utilization rate of resources is not enough
advantage : The procedure is simple , While blocking waiting for data, the process / Thread hanging , It doesn't take up much CPU resources
shortcoming : Each connection requires a separate process / Thread processing alone , When concurrent requests are large, in order to maintain the program , Memory 、 Thread switching costs a lot ,apache Of preforck This mode is used .
Synchronous blocking : The program sends to the kernel I/O Wait for the kernel to respond after the request , If the kernel handles the request IO Operation cannot return immediately , Then the process will wait And no longer accept new requests , And the process polls to see I/O Whether it is completed or not , When finished, the process will I/O The result is returned to Client, stay IO The process cannot accept requests from other clients without returning , And there's a process to check by itself I/O Whether it is completed or not , It's easy , But it's slower , Use less .
2.2.2、 Non blocking I/O Model (nonblocking IO)

User thread initiated IO Return immediately on request . But no data was read , User threads need to be initiated continuously IO request , Until the data arrives , To actually read the data , Carry on . namely “ polling ” There are two problems with the mechanism : If you have a large number of file descriptors, you have to wait , Then one by one read. This will bring a lot of Context Switch(read It's a system call , Every time you call it, you have to switch between user mode and core mode ). The polling time is not easy to grasp . Here is how long it takes to guess how long the data will arrive . The waiting time is set too long , The program response delay is too large ; Set too short , It will cause too many retries , Dry consumption CPU nothing more , It's a waste CPU The way , This model is rarely used directly , But in others IO Use non blocking in the model IO This feature .
Non blocking : The program sends to the kernel, please I/O Wait for the kernel to respond after the request , If the kernel handles the request IO Operation cannot return immediately IO result , Into the
Cheng will no longer wait , And continue to process other requests , But it still takes the process to look at the kernel at intervals I/O Whether it is completed or not .
It can be seen from the above figure , When the connection is set to non blocking , When the application process system calls recvfrom When no data is returned , The kernel will immediately return a EWOULDBLOCK error , Instead of blocking until the data is ready . As shown in the figure above, a datagram is ready for the fourth call , So the data will be copied to the application process buffer , therefore recvfrom Data returned successfully .
When an application process calls in such a loop recvfrom when , Call it polling polling. Doing so often costs a lot CPU Time , It's rarely used in practice
2.2.3、 Multiplexing I/O type (I/O multiplexing)
In the model above , Each file descriptor corresponds to IO Is monitored and processed by a thread .
Multiplexing IO It means that a thread can ( In fact, it is realized alternately , That is, concurrent completion ) Monitor and process multiple file descriptors corresponding to each other
Of IO, That is, reuse the same thread .
The reason why a thread can handle multiple at the same time IO, It is because this thread calls the... In the kernel SELECT,POLL or EPOLL Equal system adjustment
use , So as to realize multiplexing IO.
I/O multiplexing It mainly includes :select,poll,epoll Three system calls ,select/poll/epoll The good thing about it is that it's a single process You can handle multiple network connections at the same time IO.
Its basic principle is select/poll/epoll This function Will constantly poll all the socket, When a socket There's data coming in , Just inform the user of the process .
When the user process calls select, Then the whole process will be block, At the same time ,kernel Meeting “ monitor ” all select conscientious socket, When any one socket The data in is ready ,select It will return . At this time, the user process calls read operation , Take data from kernel Copy to user process .
Apache prefork Is the main process of this mode + Multi process / Single thread +select,worker Is the main process + Multi process / Multithreading +poll Pattern .
Advantages and disadvantages :
- advantage : Can be based on a blocking object , Waiting for ready on multiple descriptors at the same time , Instead of using multiple threads ( One thread per file descriptor ), This can greatly save system resources
- shortcoming : When the number of connections is small, the efficiency is better than multithreading + Blocking I/O The efficiency of the model is low , It could be more delayed , Because single connection processing requires 2 Secondary system call , The time taken up will increase
IO Multiplexing is used in the following situations :
- When the client processes multiple descriptors ( Generally interactive input and network socket interface ), You have to use I/O Reuse
- When a client processes multiple sockets at the same time , This is possible, but rarely
- When a server has to handle both listening sockets , Also deal with connected sockets , In general, it also needs to use I/O Reuse
- When a server is about to process TCP, And deal with UDP, Generally use I/O Reuse
- When a server has to process multiple services or protocols , Generally use I/O Reuse
2.2.4、 Signal driven I/O Model (signal-driven IO)
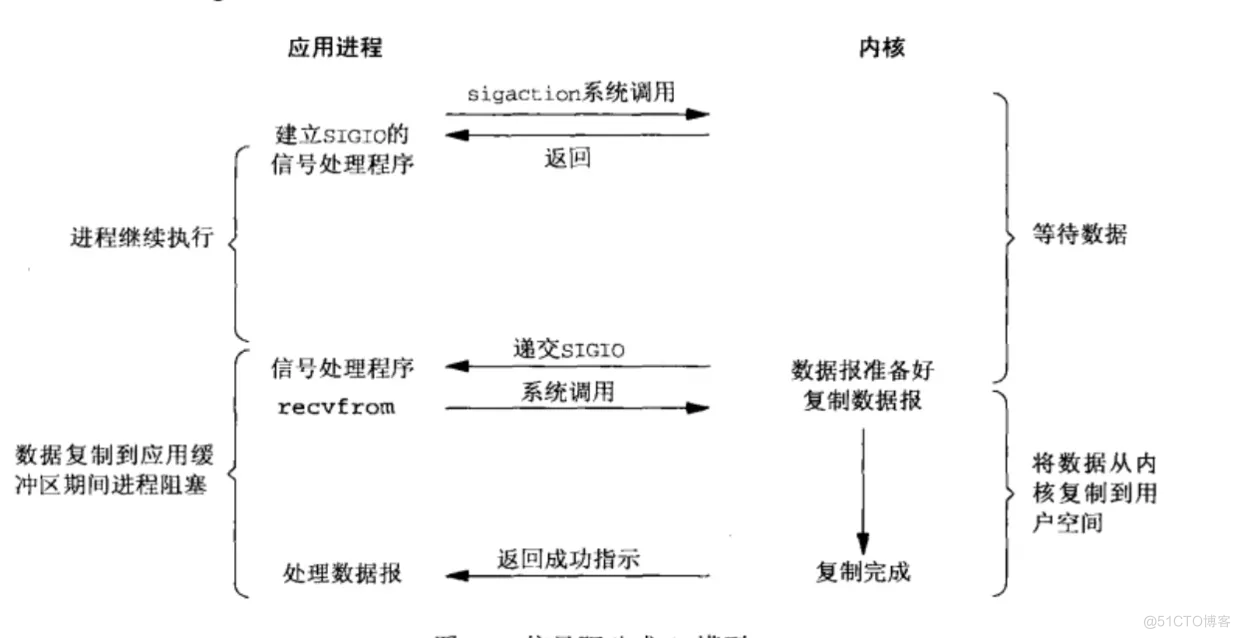
Signal driven I/O The process doesn't have to wait , You don't have to poll . Instead, let the kernel when the data is ready , Signal the process .
The call steps are , By system call sigaction , And register a callback function for signal processing , The call immediately returns , Then the main program can continue down , When there is I/O Operational readiness , That is, when the kernel data is ready , The kernel will generate a SIGIO The signal , And call back the registered signal callback function , In this way, the system can call... In the signal callback function recvfrom get data , Copy the data required by the user process from kernel space to user space .
The advantage of this model is that the process is not blocked while waiting for the datagram to arrive . The user's main program can continue to execute , Just wait for the notification from the signal processing function .
In signal driven mode I/O In the model , The application program uses socket interface to drive signal I/O, And install a signal processing function , The process continues to run without blocking
When the data is ready , The process will receive a SIGIO The signal , It can be called in the signal processing function I/O Operating functions process data .
advantage : The thread is not blocked while waiting for data , The kernel directly returns the call to receive the signal , It does not affect the process to continue to process other requests, so it can improve the utilization of resources
shortcoming : The signal I/O In large quantities IO During operation, it may be impossible to notify due to signal queue overflow
Asynchronous blocking : The program process sends... To the kernel IO After calling , Don't wait for the kernel to respond , You can continue to accept other requests , After the kernel receives the process request
On going IO If you can't return immediately , The kernel waits for the result , until IO When it is finished, the kernel notifies the process ,apache event The model is the main process + Multi process / Multithreading + Signal driven I/O Model .
2.2.5、 asynchronous I/O Model (asynchronous IO)
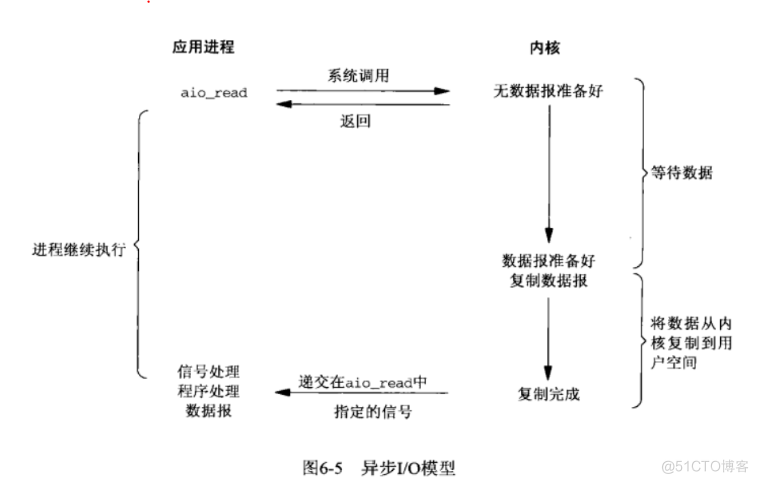
asynchronous I/O And signal driven I/O The biggest difference is , Signal driven is the kernel that tells the user when a process starts I/O operation , The asynchronous I/O The kernel notifies the user of the process I/O When is the operation completed , There is an essential difference between the two , It's equivalent to not having to eat in a restaurant , Just order a takeout , It also saves time waiting for dishes
Relative to synchronization I/O, asynchronous I/O Not in sequence . The user process goes on aio_read After the system call , Whether the kernel data is ready or not , Will be returned directly to the user process , Then the user mode process can do something else . wait until socket The data is ready , The kernel copies data directly to the process , It then sends a notification to the process from the kernel .IO Two phases , Processes are non blocking .
Signal driven IO When the kernel notifies the trigger handler , The signal handler also needs to block copying data from the kernel space buffer to the user space buffer , The asynchronous IO Directly after the second stage , The kernel directly informs the user that the thread can perform subsequent operations
advantage : asynchronous I/O Be able to make full use of DMA characteristic , Give Way I/O Operation and calculation overlap
shortcoming : To be truly asynchronous I/O, The operating system needs to do a lot of work . at present Windows Pass through IOCP True asynchrony I/O, stay Linux Under the system ,Linux 2.6 To introduce , at present AIO Is not perfect , So in Linux When implementing high concurrency network programming under IO Reuse model pattern + The architecture of multithreaded tasks can basically meet the requirements .
Linux Provides AIO Library functions implement asynchrony , But it's rarely used . There's a lot of open source asynchrony right now IO library , for example libevent、libev、libuv.
Asynchronous non-blocking : The program process sends... To the kernel IO After calling , Don't wait for the kernel to respond , You can continue to accept other requests , Called by the kernel IO If
Can't go back immediately , The kernel will continue to handle other things , until IO After completion, notify the kernel of the results , The kernel will IO The completed result is returned to the
cheng , During this period, the process can accept new requests , The kernel can also handle new things , So they don't affect each other , It can achieve larger and smaller at the same time
high IO Reuse , Therefore, asynchronous non blocking is the most used communication method .
2.2.6、 Five kinds IO contrast
These five networks I/O In the model , The later , The less congestion , Theoretically, the efficiency is also the best. The first four belong to synchronization I/O, Because the real I/O operation (revfrom) Will block the process / Threads . Only asynchrony I/O The model is related to POSIX Asynchronous defined I/O Match .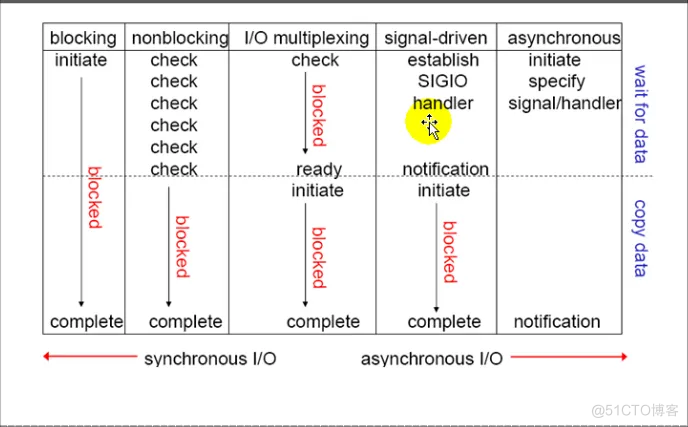
2.2.7、 Realization way
1、select:
select Ku is in linux and windows The platform basically supports Event driven model library , And the definition of the interface is basically the same , Only some parameters have slightly different meanings , Maximum concurrency limit 1024, Is the earliest event driven model .
2、poll: stay Linux The basic driving model of ,windows This driver model is not supported , yes select Upgraded version , Removed the maximum concurrency limit , Compiling nginx It can be used when –with-poll_module and –without-poll_module These two specify whether to compile select library .
3、epoll:
epoll Yes, library yes Nginx One of the highest performance event driven libraries supported by the server , Is recognized as a very good event driven model , It and select and poll There's a big difference ,epoll yes poll Upgraded version , But with the poll There's a big difference .
epoll The way to do this is to create a list of pending events , Then send this list to the kernel , When returning, check the table by polling , In order to judge whether the event happened ,epoll The maximum number of event descriptors that can be opened by a process is the maximum number of files that can be opened by the system , meanwhile epoll Library I/O The efficiency does not decrease linearly with the number of descriptors , Because it only reports to the kernel “ active ” The descriptor of the .
4、kqueue:
Used to support BSD A series of event driven models of University platform , Mainly used in FreeBSD 4.1 And above 、OpenBSD 2.0 Higher version ,NetBSD Version above grade and Mac OS X On the platform , The model is also poll A variant of Ku , So with epoll There is no essential difference , Both provide efficiency by avoiding polling operations .
5、Iocp:
Windows Implementation on the system , Corresponding to the first 5 Kind of ( asynchronous I/O) Model .
6、rtsig:
Not a common event driven , Maximum queue 1024, Not very often
7、/dev/poll:
Used to support unix Efficient event driven model of derivative platform , Mainly in the Solaris platform 、HP/UX, The model is sun The company is developing Solaris Series of platforms for the completion of the event driven mechanism , It uses virtual /dev/poll equipment , The developer adds the file descriptor to the device , And then through ioctl() Call to get event notification , Therefore, when running on the above series of platforms, please use /dev/poll Event driven mechanism .
8、eventport:
So is the programme sun The company is developing Solaris The event driven library proposed at the time , It's just Solaris 10 Version above , The driver library is designed to prevent the kernel from crashing .
2.2.8、 Summary of common models
| select | poll | epoll | |
|---|---|---|---|
| Mode of operation | Traverse | Traverse | Callback |
| Implement the bottom layer | Array | Linked list | Hashtable |
| IO efficiency | Each call is linearly traversed , The time complexity is O(n) | Each call is linearly traversed , The time complexity is O(n) | Event notification method , whenever fd be ready , The callback function registered by the system will be called , Will be ready fd Put it in relllist in , Time complexity O(1) |
| maximum connection | 1024(x86) or 2048(x64) | There is no upper limit | There is no upper limit |
| fd Copy | Every time you call select All need to put fd The collection is copied from the user to the kernel state | Every time you call poll All need to put fd The collection is copied from the user to the kernel state | call epoll_ctl Copy it into the kernel and save it , After each time epoll_wait No copy |
summary :
1、epoll It's just a group of API, Compared with select This scans all file descriptors ,epoll Read only ready file descriptors , Then add
Event based ready notification mechanism , So the performance is quite good
2、 be based on epoll Event multiplexing reduces the number of inter process switches , It makes the operating system do less useless work relative to user tasks .
3、epoll Than select In terms of multiplexing , Reduce the workload of traversal loop and memory copy , Because active connections only account for the total concurrent connections
Take a small part .
边栏推荐
猜你喜欢
Create gradle project
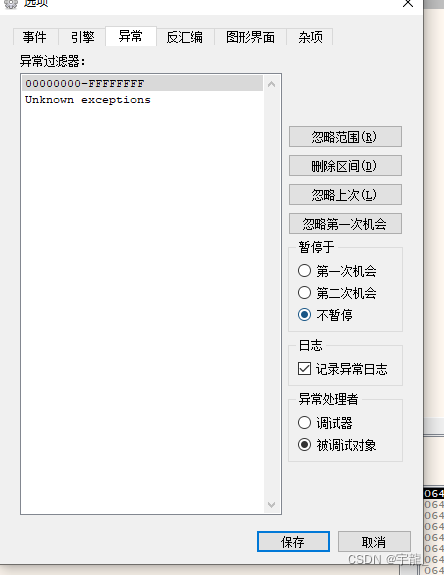
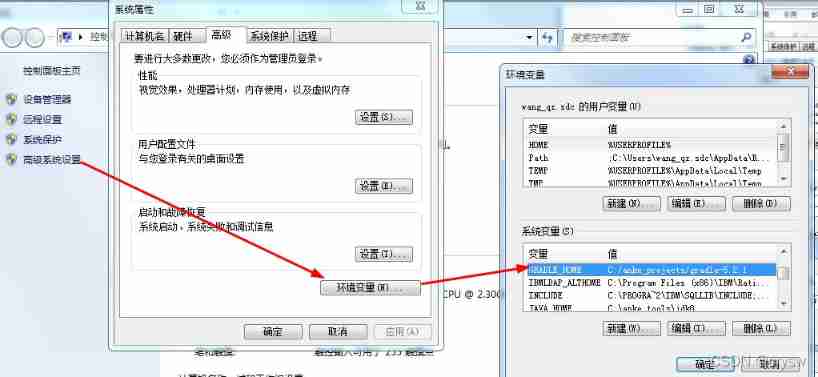
软件逆向破解入门系列(1)—xdbg32/64的常见配置及功能窗口
Microservice API gateway zuul
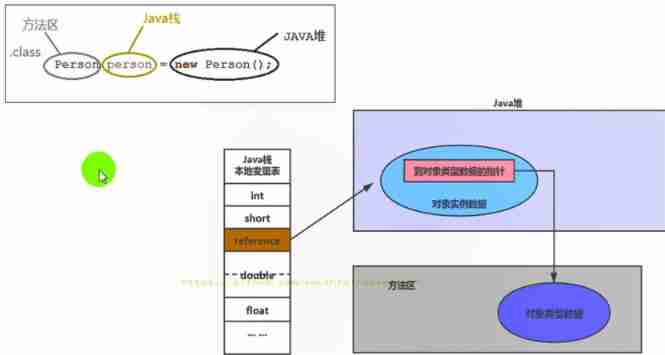
Jvm-04-runtime data area heap, method area

Visual upper system design and development (Halcon WinForm) -1 Process node design
Reading notes of "micro service design" (Part 2)
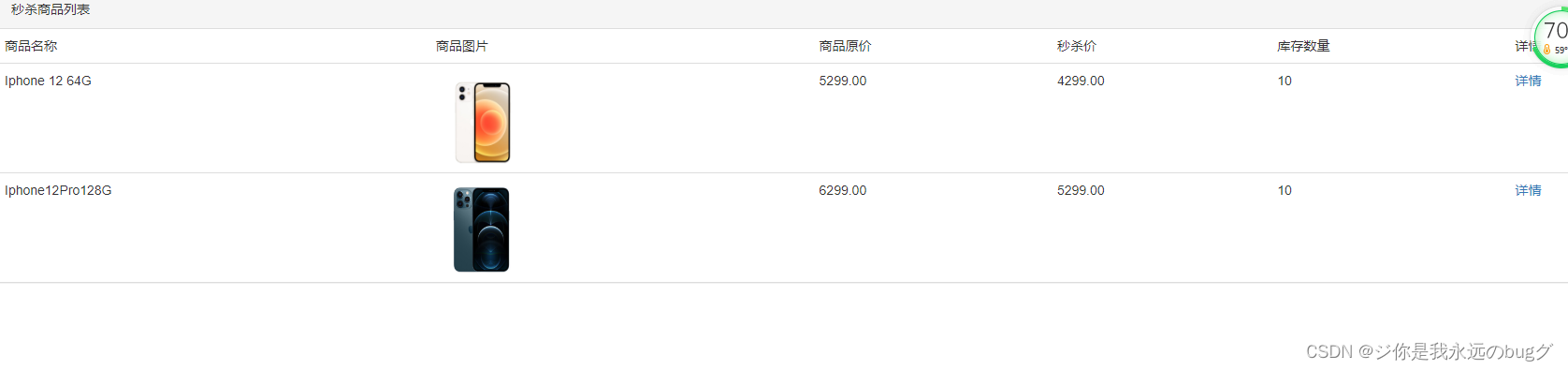
Second kill system 3 - list of items and item details
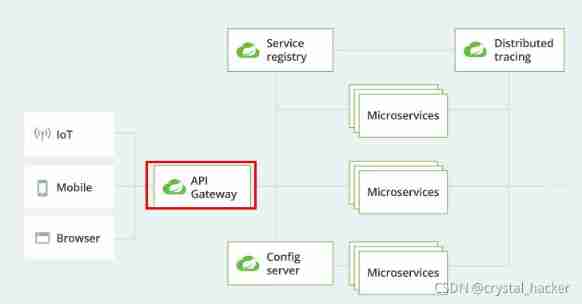
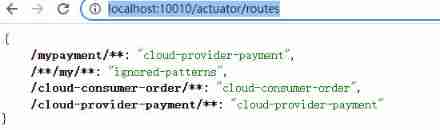
Microservice API gateway

Visual host system design and development (Halcon WinForm)
Detailed pointer advanced 2
随机推荐
Popular understanding of decision tree ID3
Enable multi-threaded download of chrome and edge browsers
阿特拉斯atlas扭矩枪 USB通讯教程基于MTCOM
软件逆向破解入门系列(1)—xdbg32/64的常见配置及功能窗口
Unityshader - materialcapture material capture effect (Emerald axe)
Microservices Seata distributed transactions
Jvm-04-runtime data area heap, method area
Redis cache penetration, cache breakdown, cache avalanche solution
Srs4.0+obs studio+vlc3 (environment construction and basic use demonstration)
Detailed explanation of string function and string function with unlimited length
Summary of JVM knowledge points
Microservice sentinel flow control degradation
Halcon与Winform学习第一节
通过进程PID获取可执行文件路径(QueryFullProcessImageName)
Intelij idea efficient skills (III)
Halcon and WinForm study section 2
函数栈帧的创建和销毁
[系统安全] 四十三.Powershell恶意代码检测系列 (5)抽象语法树自动提取万字详解
找映射关系
Halcon与Winform学习第二节