当前位置:网站首页>Hands on deep learning (34) -- sequence model
Hands on deep learning (34) -- sequence model
2022-07-04 09:36:00 【Stay a little star】
List of articles
Sequence model
One 、 What is a sequence model
Imagine you are watching Netflix( A foreign video website ) The movie on . As a great Netflix user , You decide to comment on every movie . After all , A good movie deserves the title of a good movie , And you want to see more good movies , Right ? The fact proved that , It's not that simple . as time goes on , People's views on movies will change a lot . in fact , Psychologists even name some effects :
- Anchoring (anchoring), Based on others' opinions . for example , After the Oscars , The ratings of films that get attention will rise , Although it's still the original movie . This effect will last for several months , Until people forget the awards the film once won . It turns out that , This effect will increase the score by more than half a percentage point
(Wu.Ahmed.Beutel.ea.2017). - Hedonic adaptation (hedonic adaption), That is, human beings quickly accept and adapt to a better or worse situation as the new normal . for example , After watching a lot of good movies , People expect the next film to be equally good or better . therefore , After seeing many wonderful movies , Even an ordinary movie can be considered bad .
- Seasonality (seasonality). Few viewers like watching Santa Claus movies in August .
- occasionally , Movies can become unpopular because of the misconduct of directors or actors in production .
- Some films can only become minority films because they are extremely bad .Plan 9 from Outer Space and Troll 2 That's why it's notorious .
In short , Film ratings are by no means fixed . therefore , Using time dynamics can get more accurate movie recommendations :(Koren.2009) . Of course , Sequence data is not just about movie ratings . More scenarios are given below .
- Many users have strong specific habits when using applications . for example , Social media apps are more popular after school . When the market is open, stock market trading software is more commonly used .
- It is more difficult to predict tomorrow's share price than to make up for yesterday's lost share price , Although both are only estimates of one number . After all , Foresight is much harder than hindsight . In statistics , The former ( Predictions that exceed known observations ) be called extrapolation (extrapolation), While the latter ( Estimate between existing observations ) be called Insert (interpolation).
- In essence, music 、 voice 、 Text and video are continuous . If we rearrange them , They will lose their meaning . Text title “ Dog bites man ” Far from it “ Man bites dog ” So amazing , Although the words that make up the two sentences are exactly the same .
- Earthquakes have a strong correlation , That is, after the great earthquake , There are likely to be several smaller aftershocks , These aftershocks are much larger than those without strong earthquakes . in fact , Earthquakes are spatiotemporal , in other words , Aftershocks usually occur in a short time span and close distance .
- Human interaction is also continuous , This can be seen from the quarrels and debates on twitter .
summary :
- In the time series model , The current data is related to previous observations
- Autoregressive models use their own past data to predict the future
- Markov model assumes that the current data is only related to the latest few data
- Latent variable model uses latent variables to summarize historical information
Two 、 Statistical tools for sequence models
We need statistical tools and new deep neural network structures to process sequence data . For the sake of simplicity , Our stock price is shown in the following figure ( Rich time 100 Index ) For example .

Let's use it x t x_t xt It means the price . That is to say Time step (time step) t ∈ Z + t \in \mathbb{Z}^+ t∈Z+ when , The price we observed x t x_t xt. Please note that , For the sequence in this article , t t t Usually discrete , And varies with integers or subsets . Suppose a trader wants to t t t The Japanese stock market performed well , So I predicted x t x_t xt:
x t ∼ P ( x t ∣ x t − 1 , … , x 1 ) . x_t \sim P(x_t \mid x_{t-1}, \ldots, x_1). xt∼P(xt∣xt−1,…,x1).
2.1 Autoregressive model
To achieve this , Traders can use regression models , Let's say we have linear regression model . There is only one major problem : Input x t − 1 , … , x 1 x_{t-1}, \ldots, x_1 xt−1,…,x1 The quantity of is due to t t t But different . in other words , This number will increase as the amount of data we encounter increases , Therefore, we need an approximate method to make this calculation easy to handle . Much of the rest of this chapter will focus on how to effectively estimate P ( x t ∣ x t − 1 , … , x 1 ) P(x_t \mid x_{t-1}, \ldots, x_1) P(xt∣xt−1,…,x1) an . In short , It boils down to the following two strategies .
The first strategy , Suppose a fairly long sequence in reality x t − 1 , … , x 1 x_{t-1}, \ldots, x_1 xt−1,…,x1 It may not be necessary , So we only use observation sequences x t − 1 , … , x t − τ x_{t-1}, \ldots, x_{t-\tau} xt−1,…,xt−τ, And it is satisfied that the time span is τ \tau τ. Now? , The most direct benefit is for t > τ t > \tau t>τ The number of parameters is always the same , This enables us to train a deep network mentioned above . This model is called Autoregressive model (autoregressive models), Because they are returning to themselves .
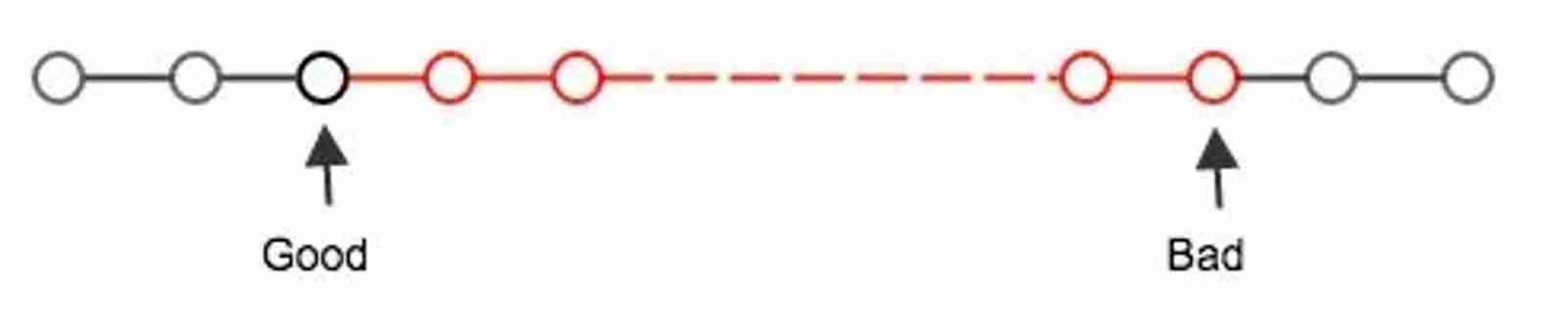
The second strategy , As shown in the figure below , It is to retain the total of some past observations h t h_t ht, Besides prediction x ^ t \hat{x}_t x^t It is also updated h t h_t ht. This produces estimates x t x_t xt and x ^ t = P ( x t ∣ h t ) \hat{x}_t = P(x_t \mid h_{t}) x^t=P(xt∣ht) Model of , And updated h t = g ( h t − 1 , x t − 1 ) h_t = g(h_{t-1}, x_{t-1}) ht=g(ht−1,xt−1). because h t h_t ht Never observed , This kind of model is also called Implicit variable autoregressive model (latent autoregressive models).

There is an obvious problem in both cases , That is, how to generate training data . A classic method is to use historical observations to predict the next observation . obviously , We don't expect time to stagnate . However , A common assumption is that the dynamics of the sequence itself will not change , Although the specific value x t x_t xt May change . This assumption is reasonable , Because the new dynamics must be affected by the new data , And we can't use the data we have now to predict the new dynamics . Statisticians call invariant dynamics Still (stationary). therefore , No matter what we do , The estimated value of the whole sequence will be obtained in the following way
P ( x 1 , … , x T ) = ∏ t = 1 T P ( x t ∣ x t − 1 , … , x 1 ) . P(x_1, \ldots, x_T) = \prod_{t=1}^T P(x_t \mid x_{t-1}, \ldots, x_1). P(x1,…,xT)=t=1∏TP(xt∣xt−1,…,x1).
Be careful , If we deal with discrete objects ( Like words ), Not consecutive numbers , Then the above considerations are still valid . The only difference is , under these circumstances , We need to use classifiers instead of regression models to estimate P ( x t ∣ x t − 1 , … , x 1 ) P(x_t \mid x_{t-1}, \ldots, x_1) P(xt∣xt−1,…,x1).
1.2 Markov model
Think about it , In the approximation method of autoregressive model , We use x t − 1 , … , x t − τ x_{t-1}, \ldots, x_{t-\tau} xt−1,…,xt−τ instead of x t − 1 , … , x 1 x_{t-1}, \ldots, x_1 xt−1,…,x1 To estimate x t x_t xt. As long as this approximation is accurate , Let's say that the sequence satisfies Markov condition (Markov condition). especially , If τ = 1 \tau = 1 τ=1, Get one First order Markov model (first-order Markov model), P ( x ) P(x) P(x) Given by the following formula :
P ( x 1 , … , x T ) = ∏ t = 1 T P ( x t ∣ x t − 1 ) where P ( x 1 ∣ x 0 ) = P ( x 1 ) . P(x_1, \ldots, x_T) = \prod_{t=1}^T P(x_t \mid x_{t-1}) \text{ where } P(x_1 \mid x_0) = P(x_1). P(x1,…,xT)=t=1∏TP(xt∣xt−1) where P(x1∣x0)=P(x1).
When x t x_t xt When only discrete values are assumed , Such a model is great , Because in this case , Using dynamic programming, the results can be calculated accurately along the Markov chain . for example , We can efficiently calculate P ( x t + 1 ∣ x t − 1 ) P(x_{t+1} \mid x_{t-1}) P(xt+1∣xt−1):
P ( x t + 1 ∣ x t − 1 ) = ∑ x t P ( x t + 1 , x t , x t − 1 ) P ( x t − 1 ) = ∑ x t P ( x t + 1 ∣ x t , x t − 1 ) P ( x t , x t − 1 ) P ( x t − 1 ) = ∑ x t P ( x t + 1 ∣ x t ) P ( x t ∣ x t − 1 ) \begin{aligned} P(x_{t+1} \mid x_{t-1}) &= \frac{\sum_{x_t} P(x_{t+1}, x_t, x_{t-1})}{P(x_{t-1})}\\ &= \frac{\sum_{x_t} P(x_{t+1} \mid x_t, x_{t-1}) P(x_t, x_{t-1})}{P(x_{t-1})}\\ &= \sum_{x_t} P(x_{t+1} \mid x_t) P(x_t \mid x_{t-1}) \end{aligned} P(xt+1∣xt−1)=P(xt−1)∑xtP(xt+1,xt,xt−1)=P(xt−1)∑xtP(xt+1∣xt,xt−1)P(xt,xt−1)=xt∑P(xt+1∣xt)P(xt∣xt−1)
Take advantage of this fact , We only need to consider the very short history observed in the past : P ( x t + 1 ∣ x t , x t − 1 ) = P ( x t + 1 ∣ x t ) P(x_{t+1} \mid x_t, x_{t-1}) = P(x_{t+1} \mid x_t) P(xt+1∣xt,xt−1)=P(xt+1∣xt). A detailed introduction to dynamic planning is beyond the scope of this section . These tools are widely used in control algorithms and reinforcement learning algorithms .
1.3 Causal relationship
In principle, , Expand in reverse order P ( x 1 , … , x T ) P(x_1, \ldots, x_T) P(x1,…,xT) it . After all , Based on the conditional probability formula , We can always write :
P ( x 1 , … , x T ) = ∏ t = T 1 P ( x t ∣ x t + 1 , … , x T ) . P(x_1, \ldots, x_T) = \prod_{t=T}^1 P(x_t \mid x_{t+1}, \ldots, x_T). P(x1,…,xT)=t=T∏1P(xt∣xt+1,…,xT).
in fact , If based on a Markov model , We can get an inverse conditional probability distribution . However , in many instances , Data has a natural direction , That is, it is advancing in time . Obviously , Future events cannot affect the past . therefore , If we change x t x_t xt, We may be able to influence x t + 1 x_{t+1} xt+1 What will happen in the future , But it cannot affect the past . in other words , If we change x t x_t xt, The distribution based on past events will not change . therefore , explain P ( x t + 1 ∣ x t ) P(x_{t+1} \mid x_t) P(xt+1∣xt) It should be better than explaining P ( x t ∣ x t + 1 ) P(x_t \mid x_{t+1}) P(xt∣xt+1) More easily . for example , In some cases , For some additive noise ϵ \epsilon ϵ, Obviously we can find x t + 1 = f ( x t ) + ϵ x_{t+1} = f(x_t) + \epsilon xt+1=f(xt)+ϵ, And vice versa (Hoyer.Janzing.Mooij.ea.2009) . That's good news , Because this is usually the direction we are interested in estimating . The book written by Peters et al . More on this topic has been explained (Peters.Janzing.Scholkopf.2017) . We only touched its fur .
Two 、 Markov Assumption MLP model training
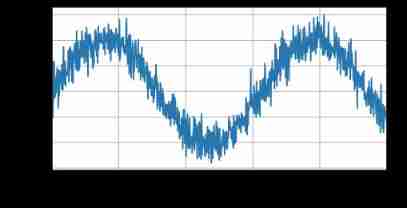
After reviewing so many statistical tools , Let's try it in practice . First , Generate some data . For the sake of simplicity , We use sine function and some additive noise to generate sequence data , The time step is 1 , 2 , … , 1000 1, 2, \ldots, 1000 1,2,…,1000.
%matplotlib inline
import torch
from torch import nn
from d2l import torch as d2l
T = 1000
time = torch.arange(1,T+1,dtype=torch.float32)
x = torch.sin(0.01*time)+torch.normal(0,0.2,(T,))
d2l.plot(time,[x],'time','x',xlim=[1,1000],figsize=(6,3))
Next , We need to transform such sequences into features and tags that our model can train . Based on embedded dimension τ \tau τ, We map the data to y t = x t y_t = x_t yt=xt and x t = [ x t − τ , … , x t − 1 ] \mathbf{x}_t = [x_{t-\tau}, \ldots, x_{t-1}] xt=[xt−τ,…,xt−1]. Astute readers may have noticed , This sample provides less data than ours τ \tau τ individual , Because we don't have enough historical records to describe τ \tau τ Data samples . A simple solution , Especially if the sequence is long enough, discard these items , Or you can fill the sequence with zeros . ad locum , We only use the pre - 600 individual “ features - label ” Train the .
# Map data to data pairs , Construct input (996,4), Use the current value as a label , The first four values are the input of the current value
tau = 4
features = torch.zeros((T-tau,tau))
for i in range(tau):
features[:,i] = x[i:T-tau+i]
labels = x[tau:].reshape((-1,1))
batch_size, n_train = 16, 600
# Only the front `n_train` Samples for training
train_iter = d2l.load_array((features[:n_train], labels[:n_train]),batch_size, is_train=True)
Design a simple multi-layer perceptron , There are two fully connected layers ,ReLU Activation function and square loss
# Initialize network parameters
def init_weights(m):
if type(m) == nn.Linear:
nn.init.xavier_uniform_(m.weight)
def get_net():
net = nn.Sequential(nn.Linear(4,10),nn.ReLU(),nn.Linear(10,1))
net.apply(init_weights)
return net
def train(net,train_iter,loss,epochs,lr):
trainer = torch.optim.Adam(net.parameters(),lr)
for epoch in range(epochs):
for X,y in train_iter:
trainer.zero_grad()
l = loss(net(X),y)
l.backward()
trainer.step()
print(f'eopoch {
epoch + 1},'
f'loss:{
d2l.evaluate_loss(net,train_iter,loss):f}')
net = get_net()
loss = nn.MSELoss()
train(net,train_iter,loss,5,0.01)
eopoch 1,loss:0.064053
eopoch 2,loss:0.056895
eopoch 3,loss:0.056115
eopoch 4,loss:0.057444
eopoch 5,loss:0.056819
3、 ... and 、 Model to predict
Because the training loss is very small , We hope the model will work well . Let's see what this means in practice . The first is to check how well the model predicts what will happen in the next time step , That is to say One step prediction (one-step-ahead prediction).
onestep_preds = net(features) # Put all the data into the network for prediction , But in fact, there are many times we need to predict according to the prediction results
d2l.plot(
[time, time[tau:]],
[x.detach().numpy(), onestep_preds.detach().numpy()], 'time', 'x',
legend=['data', '1-step preds'], xlim=[1, 1000], figsize=(6, 3))
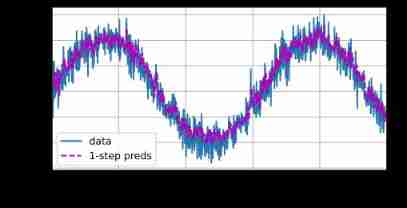
As we expected, the one-step prediction effect is good . Even if the time steps of these predictions exceed 604 604 604(n_train + tau), The results still seem credible . However, there is a small problem : If the time step of the data observation sequence is only 604 604 604, Then we don't expect to receive all the future input predicted one step in advance . contrary , We need to move forward step by step :
x ^ 605 = f ( x 601 , x 602 , x 603 , x 604 ) , x ^ 606 = f ( x 602 , x 603 , x 604 , x ^ 605 ) , x ^ 607 = f ( x 603 , x 604 , x ^ 605 , x ^ 606 ) , x ^ 608 = f ( x 604 , x ^ 605 , x ^ 606 , x ^ 607 ) , x ^ 609 = f ( x ^ 605 , x ^ 606 , x ^ 607 , x ^ 608 ) , … \hat{x}_{605} = f(x_{601}, x_{602}, x_{603}, x_{604}), \\ \hat{x}_{606} = f(x_{602}, x_{603}, x_{604}, \hat{x}_{605}), \\ \hat{x}_{607} = f(x_{603}, x_{604}, \hat{x}_{605}, \hat{x}_{606}),\\ \hat{x}_{608} = f(x_{604}, \hat{x}_{605}, \hat{x}_{606}, \hat{x}_{607}),\\ \hat{x}_{609} = f(\hat{x}_{605}, \hat{x}_{606}, \hat{x}_{607}, \hat{x}_{608}),\\ \ldots x^605=f(x601,x602,x603,x604),x^606=f(x602,x603,x604,x^605),x^607=f(x603,x604,x^605,x^606),x^608=f(x604,x^605,x^606,x^607),x^609=f(x^605,x^606,x^607,x^608),…
Usually , For until x t x_t xt The sequence of observations , It is in the time step x ^ t + k \hat{x}_{t+k} x^t+k Predicted output at t + k t+k t+k go by the name of k k k Next step prediction ( k k k-step-ahead-prediction). Because we have observed x 604 x_{604} x604, It leads k k k The prediction of step is x ^ 604 + k \hat{x}_{604+k} x^604+k. let me put it another way , We will have to use our own predictions to make multi-step predictions . Let's see if this is going well .
multistep_preds = torch.zeros(T)
multistep_preds[:n_train + tau] = x[:n_train + tau]
for i in range(n_train + tau, T):
multistep_preds[i] = net(multistep_preds[i - tau:i].reshape((1, -1)))
d2l.plot([time, time[tau:], time[n_train + tau:]], [
x.detach().numpy(),
onestep_preds.detach().numpy(),
multistep_preds[n_train + tau:].detach().numpy()], 'time', 'x',
legend=['data', '1-step preds',
'multistep preds'], xlim=[1, 1000], figsize=(6, 3))
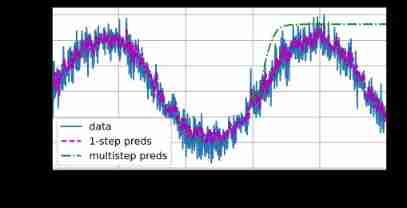
As the example above shows , It was a huge failure . After a few prediction steps , The prediction result will soon decay to a constant . Why is this algorithm so ineffective ? The final fact is that Accumulation of errors .
- Suppose in step 1 1 1 after , We accumulate some mistakes ϵ 1 = ϵ ˉ \epsilon_1 = \bar\epsilon ϵ1=ϵˉ.
- Now? , step 2 2 2 Of Input (input) Disturbed ϵ 1 \epsilon_1 ϵ1, Therefore, the accumulated errors are in order ϵ 2 = ϵ ˉ + c ϵ 1 \epsilon_2 = \bar\epsilon + c \epsilon_1 ϵ2=ϵˉ+cϵ1, among c c c For a constant , The following prediction errors are followed by analogy . So a common phenomenon is that the error may deviate from the real observation results quite quickly .
for example , future 24 Hourly weather forecasts are often quite accurate , But beyond that , The accuracy will drop rapidly . We will discuss ways to improve this in this chapter and beyond . Let's calculate k = 1 , 4 , 16 , 64 k = 1, 4, 16, 64 k=1,4,16,64 Let's take a closer look at the prediction of the whole sequence k k k The difficulty of step prediction .
max_steps = 64
features = torch.zeros((T - tau - max_steps + 1, tau + max_steps))
# Column `i` (`i` < `tau`) Is from `x` The observation of
# Its time steps from `i + 1` To `i + T - tau - max_steps + 1`
for i in range(tau):
features[:, i] = x[i:i + T - tau - max_steps + 1]
# Column `i` (`i` >= `tau`) yes (`i - tau + 1`) Step by step prediction
# Its time steps from `i + 1` To `i + T - tau - max_steps + 1`
for i in range(tau, tau + max_steps):
features[:, i] = net(features[:, i - tau:i]).reshape(-1)
steps = (1, 4, 16, 64)
d2l.plot([time[tau + i - 1:T - max_steps + i] for i in steps],
[features[:, (tau + i - 1)].detach().numpy() for i in steps], 'time',
'x', legend=[f'{
i}-step preds'
for i in steps], xlim=[5, 1000], figsize=(6, 3))
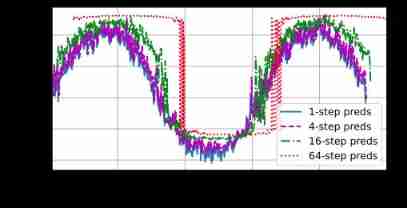
This clearly shows that when we try to further predict the future , How the quality of prediction changes . although “ 4 4 4 Next step prediction ” It still looks good , But any prediction beyond this span is almost useless .
Four 、 summary
- Interpolation and extrapolation differ greatly in difficulty . therefore , When training, always respect the chronological order of the sequence data you have , That is, never train future data .
- The estimation of sequence model needs special statistical tools . Two popular choices are : Autoregressive model and implicit variable autoregressive model .
- For causal models ( for example , Time moves forward ), Forward estimation is usually easier than backward estimation .
- For up to time steps t t t The sequence of observations , It is in the time step t + k t+k t+k The predicted output is " k k k Next step prediction ". As we further increase the forecast time k k k, Will cause error accumulation , Leading to the decline of prediction quality .
边栏推荐
- Research Report on the development trend and Prospect of global and Chinese zinc antimonide market Ⓚ 2022 ~ 2027
- Launchpad x | mode
- 2022-2028 global small batch batch batch furnace industry research and trend analysis report
- Explanation of closures in golang
- SSM online examination system source code, database using mysql, online examination system, fully functional, randomly generated question bank, supporting a variety of question types, students, teache
- 什么是uid?什么是Auth?什么是验证器?
- Solution to null JSON after serialization in golang
- C # use ffmpeg for audio transcoding
- 2022-2028 research and trend analysis report on the global edible essence industry
- The 14th five year plan and investment risk analysis report of China's hydrogen fluoride industry 2022 ~ 2028
猜你喜欢

法向量点云旋转

mmclassification 标注文件生成
Sort out the power node, Mr. Wang he's SSM integration steps
PHP personal album management system source code, realizes album classification and album grouping, as well as album image management. The database adopts Mysql to realize the login and registration f

How do microservices aggregate API documents? This wave of show~
You can see the employment prospects of PMP project management

Nurse level JDEC addition, deletion, modification and inspection exercise

Daughter love in lunch box
Ultimate bug finding method - two points
QTreeView+自定义Model实现示例
随机推荐
mmclassification 标注文件生成
Golang defer
2022-2028 research and trend analysis report on the global edible essence industry
Global and Chinese market of air fryer 2022-2028: Research Report on technology, participants, trends, market size and share
Launpad | 基礎知識
Four common methods of copying object attributes (summarize the highest efficiency)
C # use gdi+ to add text with center rotation (arbitrary angle)
2022-2028 global intelligent interactive tablet industry research and trend analysis report
The child container margin top acts on the parent container
Launpad | Basics
Analysis report on the production and marketing demand and investment forecast of tellurium dioxide in the world and China Ⓣ 2022 ~ 2027
Jianzhi offer 09 realizes queue with two stacks
IIS configure FTP website
What is permission? What is a role? What are users?
Reading notes on how to connect the network - tcp/ip connection (II)
Nurse level JDEC addition, deletion, modification and inspection exercise
2022-2028 global small batch batch batch furnace industry research and trend analysis report
Implementing expired localstorage cache with lazy deletion and scheduled deletion
How does idea withdraw code from remote push
浅谈Multus CNI