当前位置:网站首页>念念不忘,必有回响 | 悬镜诚邀您参与OpenSCA用户有奖调研
念念不忘,必有回响 | 悬镜诚邀您参与OpenSCA用户有奖调研
2022-07-02 09:37:00 【OpenSCA】

边栏推荐
- 三.芯片启动和时钟系统
- tidb-dm报警DM_sync_process_exists_with_error排查
- Luogu p4281 [ahoi2008] emergency gathering / gathering (tree doubling LCA)
- Thanos Receiver
- liftOver进行基因组坐标转换
- js中给数组添加元素的方法有哪些
- PHP tea sales and shopping online store
- enumrate的start属性的坑
- 2022 love analysis · panoramic report of digital manufacturers of state-owned enterprises
- spritejs
猜你喜欢

Why does LabVIEW lose precision in floating point numbers
金山云——2023届暑期实习
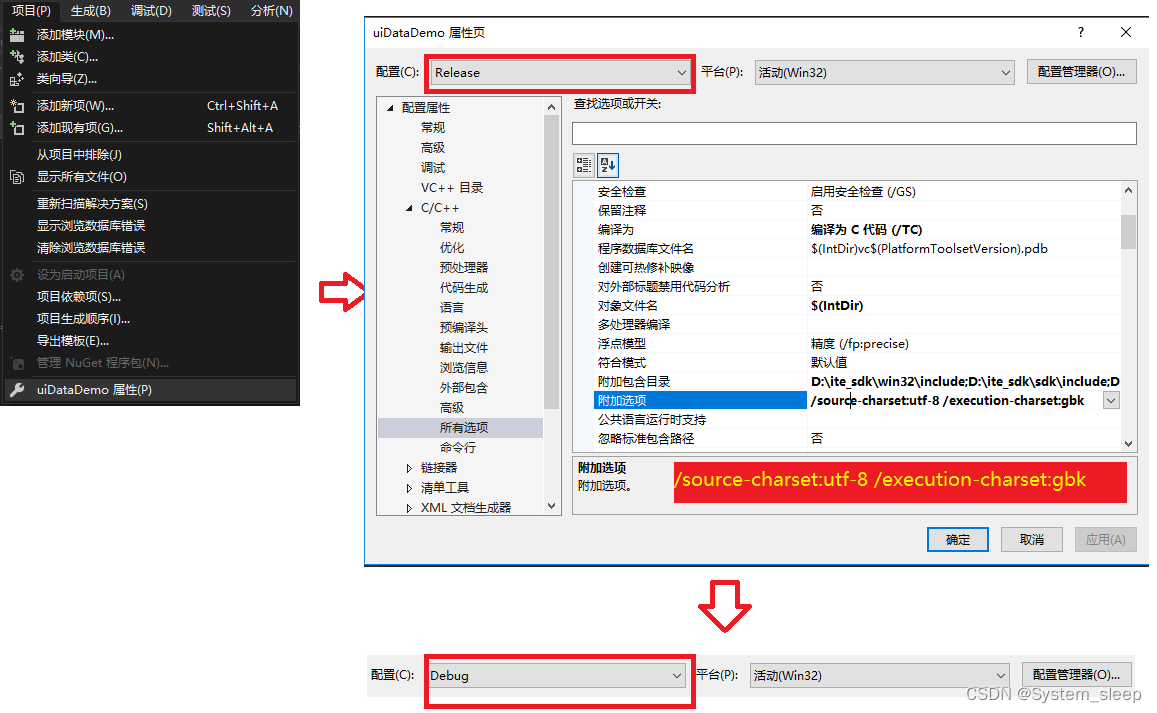
Compilation errors and printout garbled problems caused by Chinese content in vs2019 code
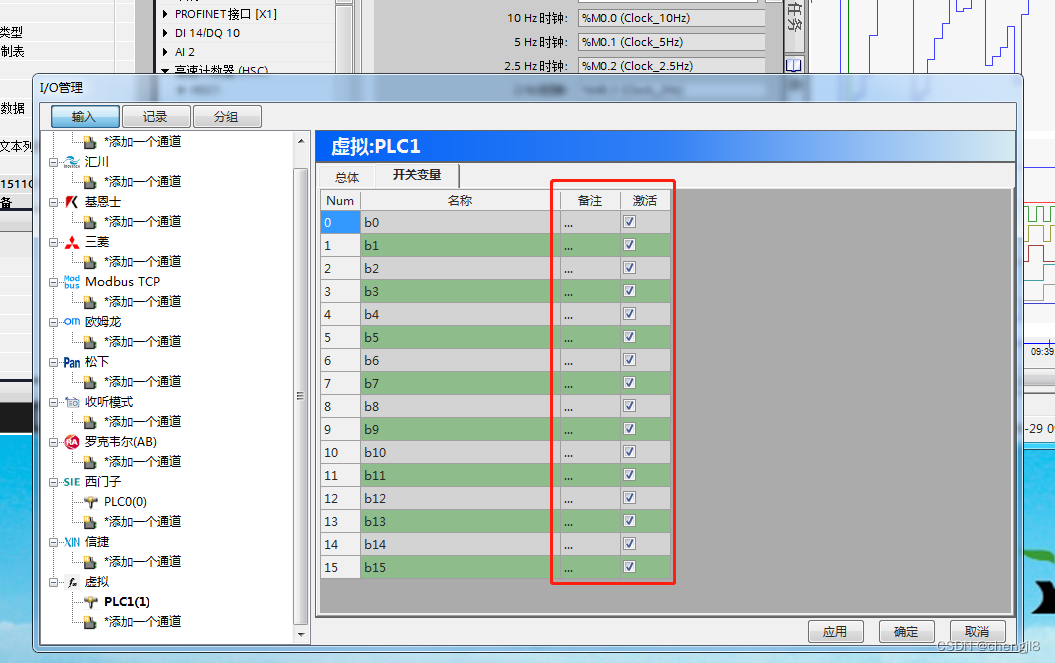
Skills of PLC recorder in quickly monitoring multiple PLC bits

C#多维数组的属性获取方法及操作注意

Special topic of binary tree -- Logu p1229 traversal problem (the number of traversals in the middle order is calculated when the pre and post order traversals of the multiplication principle are know
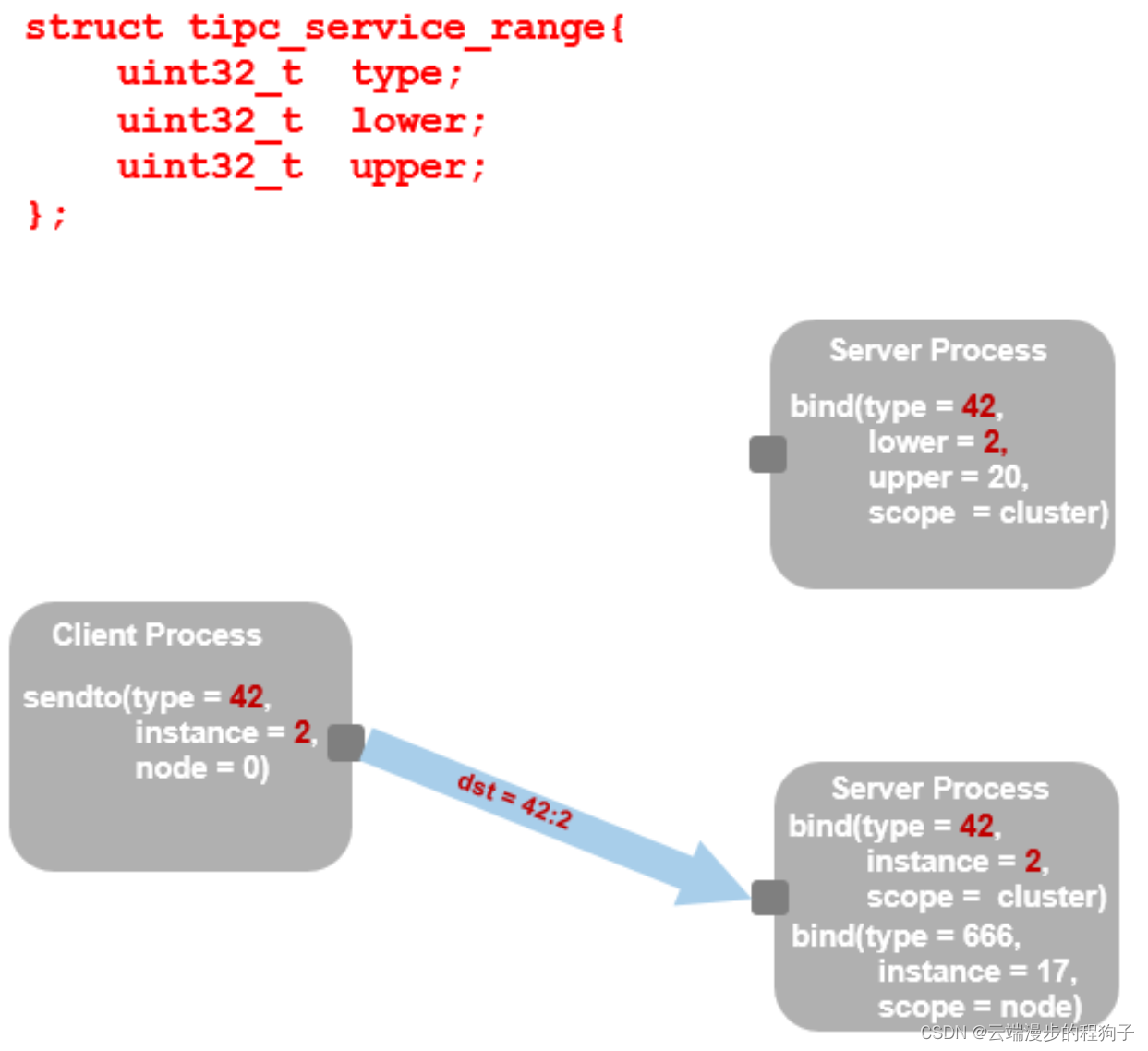
TIPC 寻址2
从攻击面视角,看信创零信任方案实践
TIPC addressing 2

二.Stm32f407芯片GPIO编程,寄存器操作,库函数操作和位段操作
随机推荐
TIPC Getting Started6
VS2019代码中包含中文内容导致的编译错误和打印输出乱码问题
The working day of the month is calculated from the 1st day of each month
III Chip startup and clock system
V2x SIM dataset (Shanghai Jiaotong University & New York University)
What are the software product management systems? Inventory of 12 best product management tools
Resources读取2d纹理 转换为png格式
Iii. Système de démarrage et d'horloge à puce
liftOver进行基因组坐标转换
flink二开,实现了个 batch lookup join(附源码)
enumrate的start属性的坑
[cloud native] 2.5 kubernetes core practice (Part 2)
mysql 基本语句
从ros1到ros2配置的一些东西
Importerror: impossible d'importer le nom « graph» de « graphviz»
Multi line display and single line display of tqdm
Resources reads 2D texture and converts it to PNG format
From the perspective of attack surface, see the practice of zero trust scheme of Xinchuang
mysql链表数据存储查询排序问题
TIPC introduction 1