当前位置:网站首页>C # joint halcon Application - Dahua Camera Collection class
C # joint halcon Application - Dahua Camera Collection class
2022-07-01 19:55:00 【123 mengno】
Dahua Camera Collection class
class Camera // Classe de caméra Dahua
{
private IDevice m_dev; /* Objet de l'appareil */
List<IGrabbedRawData> m_frameList = new List<IGrabbedRawData>(); /* Liste des caches d'images */
Thread renderThread = null; /* Afficher les fils */
bool m_bShowLoop = true; /* Variable de contrôle du fil */
Mutex m_mutex = new Mutex(); /* Verrouillage,Sécurité multithreadée garantie */
// public event Action<HObject> NewImage; // Événements d'affichage d'images
public Camera()
{
if (null == renderThread)
{
renderThread = new Thread(new ThreadStart(ShowThread));
renderThread.IsBackground = true;
renderThread.Start();
}
m_stopWatch.Start();//Le timing commence
}
/* Transcodage afficher les fils */
private void ShowThread()
{
while (m_bShowLoop)// La variable de contrôle du fil est True
{
if (m_frameList.Count == 0) //Liste des caches d'images
{
Thread.Sleep(10);
continue;
}
/* File d'attente d'images pour le dernier cadre */
m_mutex.WaitOne();//Bloquer le thread actuel, Jusqu'à ce que le signal soit reçu
IGrabbedRawData frame = m_frameList.ElementAt(0);// Renvoie l'élément à l'index spécifié dans la file d'attente
m_frameList.RemoveAt(0);
m_frameList.Clear();
m_mutex.ReleaseMutex();
/* Appel actif à la collecte des ordures */
GC.Collect();
/* Le taux d'image le plus élevé de l'affichage de contrôle est25FPS */
if (false == isTimeToDisplay())
{
continue;
}
try
{
/* L'image est transcodée enbitmapImages */
var bitmap = frame.ToBitmap(false);
// Utilisez les images acquises ici
//if (NewImage != null)
//{
// NewImage(image);
//}
}
catch
{
}
}
}
const int DEFAULT_INTERVAL = 40;// Intervalle de temps par défaut
Stopwatch m_stopWatch = new Stopwatch(); /* Compteur de temps */
/* Déterminer si l'affichage doit être effectué */
private bool isTimeToDisplay()
{
m_stopWatch.Stop();
long m_lDisplayInterval = m_stopWatch.ElapsedMilliseconds;// Obtenir le temps total mesuré par l'Instance
if (m_lDisplayInterval <= DEFAULT_INTERVAL)
{
m_stopWatch.Start();
return false;
}
else
{
m_stopWatch.Reset();
m_stopWatch.Start();
return true;
}
}
/* Rappel de la caméra allumée */
private void OnCameraOpen(object sender, EventArgs e)
{
// Enregistrez ici que la caméra est allumée
}
/* Rappel d'arrêt de la caméra */
private void OnCameraClose(object sender, EventArgs e)
{
// Enregistrez ici que la caméra est éteinte.
}
/* Rappel perdu de la caméra */
private void OnConnectLoss(object sender, EventArgs e)
{
m_dev.ShutdownGrab();
m_dev.Dispose();
m_dev = null;
}
/* Rappel des données de flux de code */
private void OnImageGrabbed(Object sender, GrabbedEventArgs e)
{
m_mutex.WaitOne();// m_mutexVerrouillage,Sécurité multithreadée garantie
m_frameList.Add(e.GrabResult.Clone());/* Liste des caches d'images */
m_mutex.ReleaseMutex();
}
/// <summary>
/// Allumez la caméra
/// </summary>
/// <returns> Une chaîne de retour vide indique une ouverture réussie , Ne pas être vide signifie que l'ouverture a échoué , Le contenu de la chaîne est une exception </returns>
/// <param name="triggerSource">Sélection de la source de déclenchement Déclenchement souple ou déclenchement externe </param>
/// <returns></returns>
public string Open(string triggerSource)
{
string sRet = string.Empty;
try
{
/* Recherche de périphériques */
List<IDeviceInfo> li = Enumerator.EnumerateDevices();
if (li.Count > 0)
{
/* Obtenir le premier appareil recherché */
m_dev = Enumerator.GetDeviceByIndex(0);
/* Enregistrer les événements liés */
m_dev.CameraOpened += OnCameraOpen;
m_dev.ConnectionLost += OnConnectLoss;
m_dev.CameraClosed += OnCameraClose;
/* Ouvrir le périphérique */
if (!m_dev.Open())
sRet = "Impossible d'allumer la caméra";
/* ParamètresTriggerSource Déclencheur souple ou externe */
m_dev.TriggerSet.Open(triggerSource);
/* Format de l'image */
using (IEnumParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImagePixelFormat])
{
p.SetValue("Mono8");
}
/* Définir le nombre de caches à 8(La valeur par défaut est16) */
m_dev.StreamGrabber.SetBufferCount(8);
/* Enregistrement des événements de rappel de flux */
m_dev.StreamGrabber.ImageGrabbed += OnImageGrabbed;
/* Activer le flux de code */
if (!m_dev.GrabUsingGrabLoopThread())
sRet = " Impossible d'ouvrir le flux de code ";
}
else
{
sRet = " Appareil photo introuvable ";
}
}
catch (Exception e)
{
sRet = e.Message;
}
return sRet;
}
/// <summary>
/// Éteignez la caméra.
/// </summary>
/// <returns> La chaîne de retour vide indique un arrêt réussi , Ne pas être vide signifie que la fermeture a échoué , Le contenu de la chaîne est une exception </returns>
public string Close()
{
string sRet = String.Empty;
1 try
{
if (m_dev == null)
{
sRet = "Device is invalid";
}
m_dev.StreamGrabber.ImageGrabbed -= OnImageGrabbed; /* Rappel non enregistré */
m_dev.ShutdownGrab(); /* Arrêter le flux de code */
m_dev.Close(); /* Éteignez la caméra. */
}
catch (Exception e)
{
sRet = e.Message;
}
return sRet;
}
/* Fermeture de la fenêtre */
public void OnClosed(EventArgs e)
{
if (m_dev != null)
{
m_dev.Dispose();
m_dev = null;
}
m_bShowLoop = false;
renderThread.Join();
}
/// <summary>
/// Définir le mode de déclenchement Réglage sous déclenchement souple On Tirant d'eau libre arrière (Déclenchement continu)Off(Déclencheur unique)
/// </summary>
/// <param name="value"></param>
public string SetTriggerMode(string value = "On")
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " Caméra non allumée ";
}
using (IEnumParameter p = m_dev.ParameterCollection[ParametrizeNameSet.TriggerMode])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Réglage de l'exposition
/// </summary>
/// <param name="value"></param>
public string SetExposureTime(float value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " Caméra non allumée ";
}
double min = GetMinExposureTime();
double max = GetMaxExposureTime();
if (value < min || value > max)
{
return string.Format(" La valeur du paramètre n'est pas dans la plage ,min:{0},max:{1}", min, max);
}
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ExposureTime])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Réglage du gain
/// </summary>
/// <param name="value"></param>
public string SetGainRaw(float value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " Caméra non allumée ";
}
double min = GetMinGainRaw();
double max = GetMaxGainRaw();
if (value < min || value > max)
{
return string.Format(" La valeur du paramètre n'est pas dans la plage ,min:{0},max:{1}", min, max);
}
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.GainRaw])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Définir la largeur de l'image
/// </summary>
/// <param name="value"></param>
/// <returns></returns>
public string SetImageWidth(int value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " Caméra non allumée ";
}
double min = GetMinImageWidth();
double max = GetMaxImageWidth();
if (value < min || value > max)
{
return string.Format(" La valeur du paramètre n'est pas dans la plage ,min:{0},max:{1}", min, max);
}
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageWidth])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Définir la largeur de l'image
/// </summary>
/// <param name="value"></param>
/// <returns></returns>
public string SetImageHeight(int value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " Caméra non allumée ";
}
double min = GetMinImageHeight();
double max = GetMaxImageHeight();
if (value < min || value > max)
{
return string.Format(" La valeur du paramètre n'est pas dans la plage ,min:{0},max:{1}", min, max);
}
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageHeight])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Définir le décalage d'image X
/// </summary>
/// <param name="value"></param>
/// <returns></returns>
public string SetImageOffsetX(int value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " Caméra non allumée ";
}
double min = GetMinImageOffsetX();
double max = GetMaxImageOffsetX();
if (value < min || value > max)
{
return string.Format(" La valeur du paramètre n'est pas dans la plage ,min:{0},max:{1}", min, max);
}
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetX])
{
p.SetValue(value);
}
return "";
}
/// <summary>
/// Définir le décalage d'image Y
/// </summary>
/// <param name="value"></param>
/// <returns></returns>
public string SetImageOffsetY(int value)
{
if (m_dev == null)
{
return "Device is invalid";
}
if (!m_dev.IsOpen)
{
return " Caméra non allumée ";
}
double min = GetMinImageOffsetY();
double max = GetMaxImageOffsetY();
if (value < min || value > max)
{
return string.Format(" La valeur du paramètre n'est pas dans la plage ,min:{0},max:{1}", min, max);
}
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetY])
{
p.SetValue(value);
}
return "";
}
#region Obtient la plage de valeurs des paramètres de la caméra
public double GetMinExposureTime()
{
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ExposureTime])
{
return p.GetMinimum();
}
}
public double GetMaxExposureTime()
{
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ExposureTime])
{
return p.GetMaximum();
}
}
public double GetMinGainRaw()
{
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.GainRaw])
{
return p.GetMinimum();
}
}
public double GetMaxGainRaw()
{
using (IFloatParameter p = m_dev.ParameterCollection[ParametrizeNameSet.GainRaw])
{
return p.GetMaximum();
}
}
public long GetMinImageWidth()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageWidth])
{
return p.GetMinimum();
}
}
public long GetMaxImageWidth()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageWidth])
{
return p.GetMaximum();
}
}
public long GetMinImageHeight()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageHeight])
{
return p.GetMinimum();
}
}
public long GetMaxImageHeight()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageHeight])
{
return p.GetMaximum();
}
}
public long GetMinImageOffsetX()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetX])
{
return p.GetMinimum();
}
}
public long GetMaxImageOffsetX()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetX])
{
return p.GetMaximum();
}
}
public long GetMinImageOffsetY()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetY])
{
return p.GetMinimum();
}
}
public long GetMaxImageOffsetY()
{
using (IIntegraParameter p = m_dev.ParameterCollection[ParametrizeNameSet.ImageOffsetY])
{
return p.GetMaximum();
}
}
#endregion
/// <summary>
/// bitmapTransfert d'imageHObject
/// </summary>
/// <param name="bmp"></param>
/// <returns></returns>
//private HObject Bitmap2HObjectBpp24(Bitmap bmp)
//{
// HObject Hobj;
// HOperatorSet.GenEmptyObj(out Hobj);
// try
// {
// Rectangle rect = new Rectangle(0, 0, bmp.Width, bmp.Height);
// BitmapData srcBmpData = bmp.LockBits(rect, ImageLockMode.ReadOnly, PixelFormat.Format24bppRgb);
// HOperatorSet.GenImageInterleaved(out Hobj, srcBmpData.Scan0, "bgr", bmp.Width, bmp.Height, 0, "byte", 0, 0, 0, 0, -1, 0);
// bmp.UnlockBits(srcBmpData);
// }
// catch (Exception e)
// {
// }
// return Hobj;
//}
}
边栏推荐
- Anaconda安装虚拟环境到指定路径
- Unreal Engine packaging project
- Linux下安装Redis,并配置环境
- Remove line breaks from MySQL query results
- How can a programmer grow rapidly
- How to correctly use vertx to operate redis (3.9.4 with source code analysis)
- 较真儿学源码系列-InheritableThreadLocal(逐行源码带你分析作者思路)
- EasyCVR集群视频广场页面切换时,请求流未能终止的问题优化
- Use of common built-in classes of JS
- math_利用微分算近似值
猜你喜欢
Uni app wechat applet one click login to obtain permission function

Why must we move from Devops to bizdevops?
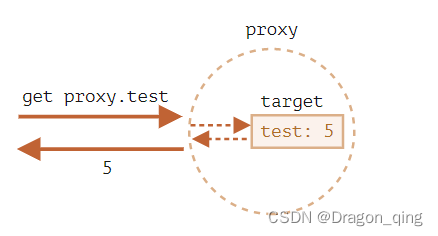
JS的Proxy

Technology T3 domestic platform! Successfully equipped with "Yihui domestic real-time system sylixos"

产品模块化设计的前世今生

GaussDB(for MySQL) :Partial Result Cache,通过缓存中间结果对算子进行加速

Bind this of the current scope for callback functions in other cases such as timers and delayers

Oracle physical architecture

Cookie和Session的相关概念

【AI服务器搭建】CUDA环境
随机推荐
Stack Overflow 2022 开发者调查:行业走向何方?
A quietly rising domestic software, low-key and powerful!
JS的Proxy
Using win7 vulnerability to crack the system login password
How to configure webrtc video streaming format for easygbs, a new version of national standard gb28181 video platform?
EasyCVR通过国标GB28181协议接入设备,出现设备自动拉流是什么原因?
解决VSCode下载慢或下载失败的问题
Detailed configuration of network security "Splunk" in national vocational college skills competition
Arduino Stepper库驱动28BYJ-48步进电机测试程序
HLS4ML报错The board_part definition was not found for tul.com.tw:pynq-z2:part0:1.0.
再回顾集合容器
Mysql查询结果去除换行
Redo和Undo的区别
[SQL optimization] the difference between with as and temporary tables
利用win7漏洞进行系统登录密码破解
mysql 報錯 Can‘t create table ‘demo01.tb_Student‘ (errno: 150)*
通过js实现金字塔(星号金字塔,回文对称数字金字塔)
MYSLQ十种锁,一篇文章带你全解析
为定时器和延时器等其它情况的回调函数绑定当前作用域的this
Tensorflow reports an error, could not load dynamic library 'libcudnn so. eight