当前位置:网站首页>[robot library] awesome robots Libraries
[robot library] awesome robots Libraries
2022-07-06 02:12:00 【Ten year dream laboratory】
 http://jslee02.github.io/awesome-robotics-libraries/
http://jslee02.github.io/awesome-robotics-libraries/
A curated list of robotics simulators and libraries.
A select list of robot simulators and libraries .
Table of Contents Catalog
Simulators Emulator
Libraries library
Dynamics Simulation
Inverse Kinematics
Machine Learning
Motion Planning and Control
Optimization
Robot Modeling
Robot Platform
SLAM
Vision
Fluid
Multiphysics
Math
ETC
Dynamic simulation
Inverse kinematics
machine learning
Motion planning and control
Optimize
Robot modeling
Robot platform
SLAM
Vision
Fluid
Multiple physical fields
mathematics
wait
Other Awesome Lists Other great lists
Contributing contribution
Simulators Emulator
Free or open source
AirSim - Based on the Unreal Engine Unreal Engine Autonomous Vehicle Simulator [github AirSim]
ARGoS - Physics based simulator , Designed to simulate large robot groups [github ilpincy/argos3]
ARTE -Matlab The tool box focuses on the robot manipulator [github 4rtur1t0/ARTE]
CARLA - Open source simulator for autonomous driving research [github carla-simulator/carla]
CoppeliaSim - Formaly V-REP. Virtual robot experimental platform Virtual robot experimentation platform [github CoppeliaRobotics/CoppeliaSimLib]
Gazebo - Dynamic multi robot simulator [github osrf/gazebo]
GraspIt! - A simulator for mastering research that can accommodate any hand and robot design [github graspit]
Habitat-Sim - Simulation platform for embedded artificial intelligence research [github facebookresearch/habitat-sim]
Hexapod Robot Simulator - Hexapod robot simulator - Open source hexapod robot inverse kinematics and gait visualizer [github mithi/hexapod]
Ignition Gazebo - Open source robot simulator [github ignitionrobotics/ign-gazebo]
Isaac - Nvidia Robot virtual simulator
MORSE - - Modular open robot simulation engine [github morse]
Neurorobotics Platform - Neural network controlled robot Internet Access simulation [bitbucket]
PyBullet - An easy-to-use simulator , For robotics and deep reinforcement learning [github bullet3]
Robot Gui - One is based on three.js Of 3D Robot interface [github glumb/robot-gui]
Simbad - Java 3D Robot simulator , You can use the available sensors to write your own robot controller by modifying the environment .
Unity - Popular game engines , Open source tools for robot simulation are now available , Tutorials and resources [github Unity-Technologies/Unity-Robotics-Hub]
Webots - A robot simulator that provides a complete development environment [github omichel/webots]
Commercial commercial
Actin Simulation Actin simulation
Artiminds - planning , Programming , operation , Analysis and optimization Planning, programming, operation, analysis and optimization
Kineo - Path planning and trajectory optimization for industrial robots and digital model review applications Path planning and trajectory optimization for industrial robotics and digital mock-up review applications
RobotDK - Robot simulation and OLP
RobotStudio
Robot Virtual Worlds
Virtual Robotics Toolkit
Visual Components
Cloud cloud
AWS RoboMaker - Simplify large-scale development , Services for testing and deploying intelligent robot applications
Libraries library
Dynamics Simulation Dynamic simulation
: Warning : The following table is incomplete . If incorrect or missing content is found , Please report at any time .
Name Models Features Languages Licenses Code Popularity
ARCSim soft C++
Bullet rigid, soft ik, id, urdf, sdf C++, Python Zlib github bullet3
CHRONO::ENGINE rigid, soft, granular, fluid ik, urdf C++, Python BSD-3-Clause github chrono
DART rigid, soft ik, id, plan, urdf, sdf C++, Python BSD-2-Clause github dart
Drake rigid, aero, fluid ik, trj-opt, plan C++, Matlab BSD-3-Clause github drake
Flex rigid, soft, particle, fluid C++ github NVIDIAGameWorks/FleX
FROST rigid MATLAB BSD-3-Clause github ayonga/frost-dev
IBDS rigid, particle C++ Zlib
idyntree rigid id C++, Python, Matlab, Lua LGPL-2.1 github idyntree
KDL rigid ik C++ LGPL-2.1 github orocos_kinematics_dynamics
kindr rigid (todo) C++, Matlab BSD-3-Clause github kindr
Klampt (todo) (todo) C++, Python BSD-3-Clause github Klampt
LibrePilot uav, vehicles (todo) C++ GPL-3.0 bitbucket, github LibrePilot
MARS (todo) (todo) C++, Python LGPL-3.0 github mars
MBDyn (todo) (todo) C++ GPL-2.1 download
MBSim (todo) (todo) C++ (not specified) github mbsim-env/mbsim
MBSlib (todo) (todo) C++ LGPL-3.0 github mbslib
metapod (todo) (todo) C++ LGPL-3.0 github metapod
Moby rigid id C++ GPL-2.0 github Moby
mrpt vehicle slam, cv C++, Python, Matlab BSD-3-Clause github mrpt
MuJoCo (todo) id C++, Python licenses closed source
mvsim vehicle (todo) C++ GPL-3.0 github ual-arm-ros-pkg/mvsim
Newton Dynamics (todo) (todo) C++ Zlib github newton-dynamics
nphysics (todo) (todo) Rust BSD-3-Clause github sebcrozet/nphysics
ODE rigid C++ LGPL-2.1 or BSD-3-Clause bitbucket
OpenRAVE (todo) (todo) C++, Python LGPL-3.0 github openrave
pinocchio rigid ik, id, urdf, analytical derivatives, code generation C++, Python BSD-2-Clause github pinocchio
PositionBasedDynamics (todo) (todo) C++ MIT github PositionBasedDynamics
PhysX (todo) (todo) C++ unknown github NVIDIAGameWorks/PhysX
PyDy (todo) (todo) Python BSD-3-Clause github pydy
RBDL rigid ik,id,urdf C++, Python Zlib github rbdl
RBDyn rigid (todo) C++, Python LGPL-3.0 github RBDyn
RaiSim (todo) (todo) C++ custom github leggedrobotics/raisimLib
ReactPhysics3d (todo) (todo) C++ Zlib github reactphysics3d
RigidBodyDynamics.jl rigid (todo) Julia MIT “Expat” github RigidBodyDynamics.jl
Rigs of Rods rigid, soft, vehicle (todo) C++ GPL-3.0 github RigsOfRods/rigs-of-rods
Robopy (todo) (todo) Python 3 MIT github adityadua24/robopy
Robotics Library (todo) (todo) C++ GPL-3.0 or BSD-2-Clause github rl
RobWork (todo) (todo) C++ Apache-2.0 gitlab
siconos (todo) (todo) C++, Python Apache-2.0 github siconos
Simbody rigid, molecules id, urdf C++ Apache-2.0 github simbody
SOFA rigid, soft, medical (todo) C++ LGPL-2.1 github sofa
Tiny Differentiable Simulator rigid (todo) C++, Python Apache-2.0 github google-research/tiny-differentiable-simulator
trep rigid dm, trj-opt C, Python GPL-3.0 github trep
qu3e rigid - C++ Zlib github qu3e
For the sake of simplicity , Abbreviated names are used to indicate supported models and functions , As shown below :
Supported models
rigid: rigid body
soft: software
aero: aerodynamics
granular: Granular material ( Like sand )
fluid: fluid dynamics Hydrodynamics
vehicles vehicle
uav: Unmanned aerial vehicle (uav) ( Unmanned aerial vehicle )
medical Medical
molecules molecular
parallel: parallel connection ( Such as Stewart platform )
Simulation , analysis , plan , Control the function of the design Features on Simulation, Analysis, Planning, Control Design
dm: Discrete mechanics
ik: Inverse Kinematics solver ( Please find in this list IK Special software package )
id: Inverse dynamics
slam: Locate and map at the same time
trj-opt: Trajectory optimization
plan: Motion planning algorithm
cv: Computer vision
urdf: urdf Parser
sdf: sdf Parser
Inverse Kinematics Inverse kinematics
IKBT- Used to solve the inverse kinematics of robot arm in symbolic form python Package [github uw-biorobotics / IKBT]
RelaxedIK- Accurate and feasible real-time synthesis of robot arm motion [github uwgraphics / relaxed_ik]
Machine Learning machine learning
DLL-C ++ Deep learning library (DLL)[github wichtounet / dll]
DyNet- Dynamic neural network toolkit [github clab / dynet]
Fido- Lightweight for embedded electronics and robotics C ++ Machine learning library [github FidoProject / Fido]
MiniDNN- Header only for deep neural networks C ++ library [github yixuan / MiniDNN]
mlpack- Extensible C ++ Machine learning library [github mlpack / mlpack]
OpenAI Gym- Develop and compare reinforcement learning algorithms [github Gymnasium ]
Gym-dart [github dart-env]
gym-gazebo[github dart-env]
RLLib- TDOA learning algorithm in reinforcement learning [github samindaa / RLLib]
tiny-dnn-C ++ 14 Only headers in , A dependency free deep learning framework [github tiny-dnn / tiny-dnn]
Motion Planning and Control Motion planning and control
AIKIDO- Solve the problem of robot motion planning and decision . [github aikido]
CuiKSuite- Applications that solve location analysis and path planning problems
Control Toolbox- For Robotics , Open source of optimal and model predictive control C ++ library [github ethz-adrl / control-toolbox]
GPMP2- Gaussian process motion planner 2 [github gtrll / gpmp2]
HPP- Motion chain path planning in a chaotic environment [github]
MoveIt! - Motion planning framework [github moveit]
OMPL- Open motion planning Library [bitbucket,github ompl]
pymanoid- be based on OpenRAVE Humanoid robot prototype development environment [github stephane-caron / pymanoid]
ROS Behavior Tree-[github miccol / ROS-Behavior-Tree]
Ruckig-Real-time, Online trajectory generation with optimal time and limited acceleration . [github ruckig]
Kautham project - Robot simulation toolkit for Motion Planning [github kautham]
TOPP-RA- Time parameterized robot trajectory subject to kinematic and dynamic constraints [github_hungpham2511 / toppra]
Motion Optimizer Motion optimizer
TopiCo- Generation and control of time optimal trajectory [github AIS-Bonn / TopiCo]
towr- A feature-based lightweight C ++ library , For trajectory optimization of leg robot [github ethz-adrl / towr]
trajopt- Generate the framework of robot trajectory through local optimization [github joschu / trajopt]
Nearest neighbor
Cover-Tree- For fast k Nearest neighbor search Cover tree data structure [github Cover-Tree]
Mike Izbicki wait forsomeone ,ICML 2015, Reported faster coverage of trees .
FLANN- A fast library similar to the nearest neighbor [github flann]
nanoflann- have KD Tree nearest neighbor search [github nanoflann]
3D mapping
libpointmatcher- Used in robotics for 2-D / 3-D Mapped iterative closest point Library [github ethz-asl / libpointmatcher]
Octree- Use Octree Fast radius neighbor search [github jbehley / octree]
OctoMap- be based on Octrees Efficient probability 3D Mapping framework [github octomap]
PCL-2D / 3D Image and point cloud processing [github PointCloudLibrary / pcl]
voxblox- Based on flexible voxel based mapping , Focus on truncated and Euclidean symbolic distance fields [github voxblox]
Practical software
Goxel- Free and open source 3D Voxel editor [github guillaumechereau / goxel]
Optimize
CasADi- Symbolic framework for algorithm differentiation and numerical optimization [github casadi]
Ceres Solver- Large nonlinear optimization Library [github ceres-solver]
eigen-qld- take QLD QP Solver and Eigen3 Interfaces used with libraries [github jrl-umi3218 / eigen-qld]
EXOTica- General optimization tool set for robot platform [github ipab-slmc / exotica]
hpipm- High performance interior point method QP solver (Ipopt,Snopt)[github giaf / hpipm]
HYPRE- Parallel solver for sparse linear systems , With multi grid method [github hypre-space / hypre]
ifopt- Nonlinear programming solver (Ipopt,Snopt) Feature based lightweight C ++ Interface [github ifopt]
Ipopt- Large scale nonlinear optimization Library [github Ipopt]
libcmaes- Use CMA-ES Black box random optimization of Algorithm [github beniz / libcmaes]
limbo- Gaussian process of black box function and Bayesian Optimization [github resibots / limbo]
lpsolvers- Have a unified API Of Python Linear programming solver in [github lpsolvers]
NLopt- Nonlinear optimization [github nlopt]
OptimLib- Light weight of numerical optimization method of nonlinear function C ++ library [github kthohr / optim]
Pagmo- Scientific library for large-scale parallel optimization [github esa / pagmo2]
pymoo-Python Multi objective optimization in [github msu-coinlab / pymoo]
qpsolvers- Have a unified API Of Python Quadratic programming solver [github qpsolvers]
RobOptim- Numerical optimization of robot . [github roboptim / roboptim-core]
SCS- Numerical optimization for solving large convex cone problems [github scs]
sferes2- Evolutionary computing [github sferes2 / sferes2]
Robot modeling
Robot model description format
SDF- Describe the robot simulator , Visualization and control of objects and environments XML Format (bitbucket)
urdf- Representing the robot model XML Format [github ros / urdfdom]
Utility program for building robot model
phobos-Blender Attachments to , Used to create URDF and SMURF Robot models [github phobos]
Robot platform
AutoRally- High performance test platform for advanced perception and control research [github autorally / autorally]
Linorobot-ROS Compatible ground robots [github linorobot / linorobot]
onine- be based on Linorobot and Braccio Arm Service robots [github grassjelly / onine]
Rock- Software framework of robot system
ROS- Write a flexible framework for robot software [github repos]
ROS 2- Robot operating system (ROS) Of the software stack 2.0 edition [github repos]
YARP- It is suitable for communication and device interface from humanoid animals to embedded devices [github robotology / yarp]
SLAM
Cartographer- Configured across multiple platforms and sensors 2D and 3D real time SLAM [github cartographer]
DSO- Novel direct and sparse formulas for visual odometer [github dso]
ElasticFusion- Real time dense vision SLAM System [github ElasticFusion]
fiducials- Use datum marks to locate and map at the same time [github UbiquityRobotics / fiducials]
GTSAM- Smoothing and mapping in robotics and vision (SAM)[bitbucket]
Kintinuous- Real time massive dense vision SLAM System [github Kintinuous]
LSD-SLAM- Real time monocular SLAM [github lsdslam]
ORB-SLAM2- For monocular , Stereo and RGB-D Real time camera SLAM library [github ORB_SLAM2]
RTAP-Map- Based on global Bayesian closed-loop detector RGB-D Graph SLAM Method [github introlab / rtabmap]
SRBA- Flexible solution under relative sub coordinates SLAM / BA The problem of , Applicable to different sub mapping strategies [github srba]
SLAM Data sets
Great SLAM Data sets https://github.com/youngguncho/awesome-slam-datasets
Vision
ViSP- Visual servo platform [github lagadic / visp]
Fluid
Fluid Engine Dev-Jet- Fluid simulation engine for computer graphics applications [github doyubkim / fluid-engine-dev]
Multiple physical fields
Kratos- Framework for building parallel multidisciplinary simulation software [github KratosMultiphysics / Kratos]
mathematics
Fastor-C ++ 11/14/17 Lightweight high-performance tensor algebra framework in [github romeric / Fastor]
linalg.h- be used for C ++ 11 Single header file common field linear algebra Library [github sgorsten / linalg]
manif- be used for Lie Theoretical miniaturization c ++ 11 Only the libraries of header files . [github artivis / manif]
Sophus- Use Eigen Li Qunku [github strasdat / Sophus]
SpaceVelAlg- have Eigen3 Space vector algebra [github jrl-umi3218 / SpaceVecAlg]
wait
fuse- A general architecture for real-time sensor fusion on robots [github locusrobotics / fuse]
Other Awesome Lists
Awesome Robotics (Kiloreux) https://github.com/Kiloreux/awesome-robotics
Awesome Robotics (ahundt) https://github.com/ahundt/awesome-robotics
Awesome Robotic Tooling https://github.com/Ly0n/awesome-robotic-tooling
Awesome Artificial Intelligence https://github.com/owainlewis/awesome-artificial-intelligence
Awesome Collision Detection https://github.com/jslee02/awesome-collision-detection
Awesome Computer Vision https://github.com/jbhuang0604/awesome-computer-vision
Awesome Machine Learning https://github.com/josephmisiti/awesome-machine-learning
Awesome Deep Learning github.com/ChristosChristofidis/awesome-deep-learning
Awesome Gazebo github.com/fkromer/awesome-gazebo
Awesome Grasping https://github.com/Po-Jen/awesome-grasping
Awesome Human Robot Interaction https://github.com/Po-Jen/awesome-human-robot-interaction
PythonRobotics - Python sample codes for robotics algorithms https://github.com/AtsushiSakai/PythonRobotics
Robotics Coursework - A list of robotics courses you can take online https://github.com/mithi/robotics-coursework
边栏推荐
- Virtual machine network, networking settings, interconnection with host computer, network configuration
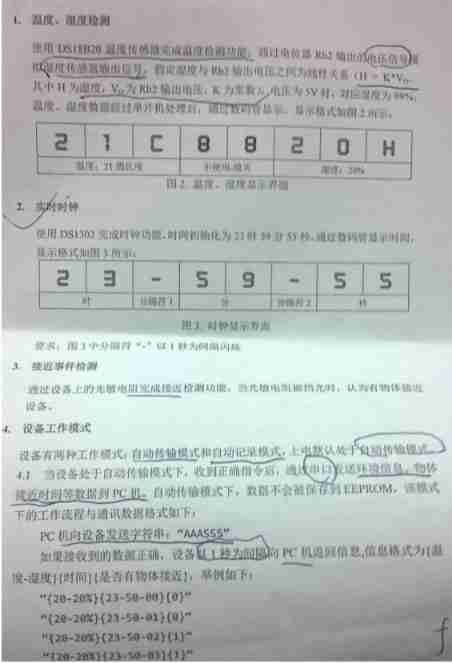
- Blue Bridge Cup embedded_ STM32_ New project file_ Explain in detail
- 2 power view
- 在线怎么生成富文本
- 【机器人库】 awesome-robotics-libraries
- Selenium waiting mode
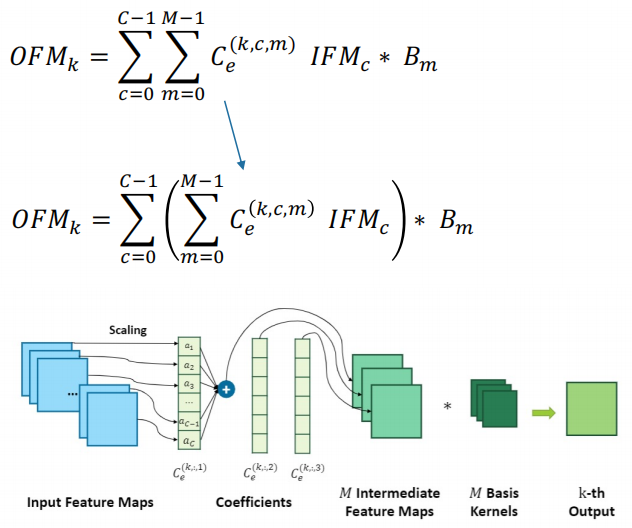
- dried food! Accelerating sparse neural network through hardware and software co design
- Shutter doctor: Xcode installation is incomplete
- Selenium element positioning (2)
- 0211 embedded C language learning
猜你喜欢
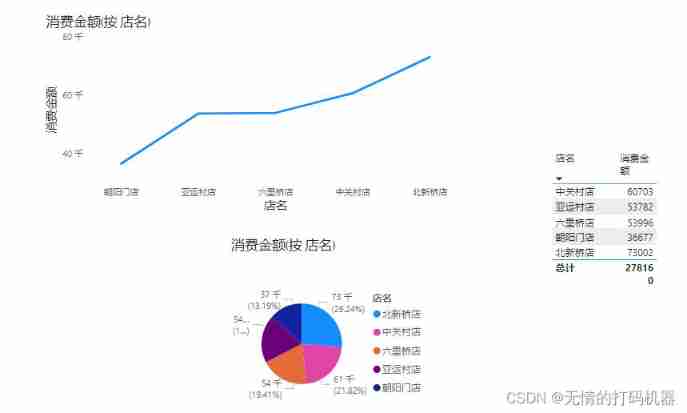
2 power view
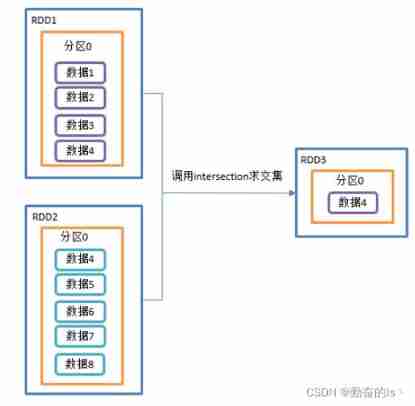
RDD conversion operator of spark
Multi function event recorder of the 5th National Games of the Blue Bridge Cup

Adapter-a technology of adaptive pre training continuous learning

How to improve the level of pinduoduo store? Dianyingtong came to tell you

The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower

2022 PMP project management examination agile knowledge points (8)
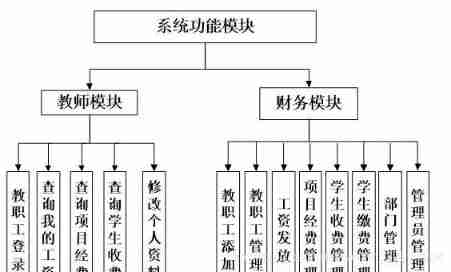
PHP campus financial management system for computer graduation design

Basic operations of databases and tables ----- default constraints
dried food! Accelerating sparse neural network through hardware and software co design
随机推荐
Overview of spark RDD
Flowable source code comments (36) process instance migration status job processor, BPMN history cleanup job processor, external worker task completion job processor
VIM usage guide
使用npm发布自己开发的工具包笔记
Using SA token to solve websocket handshake authentication
[depth first search] Ji Suan Ke: Betsy's trip
Initialize MySQL database when docker container starts
National intangible cultural heritage inheritor HD Wang's shadow digital collection of "Four Beauties" made an amazing debut!
Ali test Open face test
[width first search] Ji Suan Ke: Suan tou Jun goes home (BFS with conditions)
PHP campus movie website system for computer graduation design
Redis-列表
How to set an alias inside a bash shell script so that is it visible from the outside?
leetcode3、實現 strStr()
[depth first search notes] Abstract DFS
I like Takeshi Kitano's words very much: although it's hard, I will still choose that kind of hot life
Visualstudio2019 compilation configuration lastools-v2.0.0 under win10 system
Comments on flowable source code (XXXV) timer activation process definition processor, process instance migration job processor
Unreal browser plug-in
GBase 8c数据库升级报错