当前位置:网站首页>Kill -9 system call used by PID to kill process
Kill -9 system call used by PID to kill process
2022-07-06 17:53:00 【TABE_】
Here's the catalog title
kill Command Introduction
kill The command sends a signal to the operating system kernel ( Most of them are termination signals ) And target process PID, And then the system kernel depends on the type of signal it receives , Process the specified process .
kill( Options )( Parameters )
-a: When processing the current process , There is no limit to the correspondence between the command name and the process number ;
-l < Information number >: If not add < Information number > Options , be -l Parameter will list all information names ;
-p: Appoint kill The command only prints the process number of the relevant process , Without sending any signals ;
-s < Information name or number >: Specify the message to send ;
-u: Designated user .
Only the first one 9 Signals (SIGKILL) To terminate the process unconditionally , Other signaling processes have the right to ignore , Here are some common signals
HUP 1 Terminal disconnection ( Smooth restart process )
INT 2 interrupt ( Same as Ctrl + C)
QUIT 3 sign out ( Same as Ctrl + \)
TERM 15 End
KILL 9 Mandatory termination
CONT 18 continue ( And STOP contrary , fg/bg command )
STOP 19 Pause ( Same as Ctrl + Z)
Example :
[[email protected].com ~]#ps -ef |grep chronyd
chrony 30365 1 0 19:58 ? 00:00:00 /usr/sbin/chronyd
root 30385 29218 0 19:58 pts/1 00:00:00 grep --color=auto chronyd
[[email protected].com ~]#kill -9 30483
[[email protected].com ~]#ps -ef |grep chronyd
root 30508 29218 0 20:00 pts/1 00:00:00 grep --color=auto chronyd
kill The principle of command
perform kill -9 <PID>, First of all, we need to generate signals . perform kill The program needs a pid, According to this pid Find the process task_struct( This is Linux The following represents the process / Thread structure ), Then write down this signal in the specific member variables of this structure . At this time, the signal is generated but has not been processed by a specific process , be called Pending signal.
Wait until the next time CPU When this process is scheduled , The kernel guarantees to execute first do_signal This function checks whether there is a signal that needs to be processed , If you have any , Then deal with ; If there is no , Then continue the process directly . So we see , stay Linux Next , Signals do not behave asynchronously like interrupts , Instead, every time you schedule this process, you check whether there are unprocessed signals .
Signal transmission
call kill After the command , Signal and target process PID Sent by the user to the kernel .
kill It's a program in itself , Is the source code , Its code can be found in Linux Of coreutils Found in . The code is very long , I won't copy it all , Those who are interested can go and have a closer look .kill The core code of the command is like this :
static int send_signals (int signum, char *const *argv) {
…
kill (pid, signum);
…
}
int main (int argc, char **argv) {
…
send_signals (signum, argv + optind);
…
}
kill Command called send_signals (signum, argv + optind) function ,send_signals (signum, argv + optind) System call is called again kill (pid, signum), The system call is in Linux kernel linux-3.16.3/kernel/signal.c To realize , It describes the structure of the process task_struct To operate , stay task_struct Write down the signals to be transmitted in the specific member variables in .task_struct The signal related parts of the structure are as follows :
struct task_struct {
… /* signal handlers */
struct signal_struct *signal; /* All threads of a process share one signal */
struct sighand_struct *sighand; sigset_t blocked,real_blocked; /* Which signals are blocked */
sigset_t saved_sigmask; /* restored if set_restore_sigmask() was used */
struct sigpending pending; /* Multiple threads in the process have their own pending */
…
}
kill (pid, signum) The core code of the system call is as follows , For ease of understanding , I added comments to the core logic :
SYSCALL_DEFINE2(kill, pid_t, pid, int, sig) {
…
return kill_something_info(sig, &info, pid);
}
static int kill_something_info(int sig, struct siginfo * info, pid_t pid) {
int ret;
// If pid Greater than 0, Send the signal to the specified process
if (pid > 0) {
ret = kill_pid_info(sig, info, find_vpid(pid));
return ret;
}
// If pid <=0 And it's not equal to -1, Send a signal to -pid Specified process group
if (pid != -1) {
ret = __kill_pgrp_info(sig, info, pid ? find_vpid( - pid) : task_pgrp(current));
}
else {
// Otherwise, it sends a signal to all processes except its own process
int retval = 0,
count = 0;
struct task_struct * p;
for_each_process(p) {
if (task_pid_vnr(p) > 1 && !same_thread_group(p, current)) {
int err = group_send_sig_info(sig, info, p); ++count;
if (err != -EPERM) retval = err;
}
}
ret = count ? retval: -ESRCH;
}
return ret;
}
kill (pid, signum) Would call kill_something_info(sig, &info, pid),kill_something_info(sig, &info, pid) Will be based on pid To determine whether to send to a specific process or a process group , Let's mainly look at the situation of sending to a specific process , That is to call kill_pid_info(sig, info, find_vpid(pid)), The code for this function is as follows :
int kill_pid_info(int sig, struct siginfo * info, struct pid * pid) {
int error = -ESRCH;
struct task_struct * p;
p = pid_task(pid, PIDTYPE_PID);
if (p) {
error = group_send_sig_info(sig, info, p);
}
return error;
}```
kill_pid_info(sig, info, find_vpid(pid)) We mentioned above task_strcut, This is Linux The following represents each process / Thread structure , according to struct pid Find this structure , It's called group_send_sig_info(sig, info, p), The code for this function is as follows :
int group_send_sig_info(int sig, struct siginfo * info, struct task_struct * p) {
int ret;
ret = do_send_sig_info(sig, info, p, true);
return ret;
}
int do_send_sig_info(int sig, struct siginfo * info, struct task_struct * p, bool group) {
unsigned long flags;
int ret = -ESRCH;
if (lock_task_sighand(p, &flags)) {
ret = send_signal(sig, info, p, group);
unlock_task_sighand(p, &flags);
}
return ret;
}
static int send_signal(int sig, struct siginfo * info, struct task_struct * t, int group) {
int from_ancestor_ns = 0;
#ifdef CONFIG_PID_NS from_ancestor_ns = si_fromuser(info) && !task_pid_nr_ns(current, task_active_pid_ns(t));
#endif
return __send_signal(sig, info, t, group, from_ancestor_ns);
}
static int __send_signal(int sig, struct siginfo * info, struct task_struct * t, int group, int from_ancestor_ns) {
struct sigpending * pending;
struct sigqueue * q;
int override_rlimit;
int ret = 0,result; // The difference between sending to a process and a thread is here , If it's a process , be &t->signal->shared_pending, otherwise &t->pending pending = group ? &t->signal->shared_pending : &t->pending;
/* * fast-pathed signals for kernel-internal things like SIGSTOP * or SIGKILL. */
if (info == SEND_SIG_FORCED) goto out_set;
…
out_set: // Notify the signal listening
signalfd. signalfd_notify(t, sig); // take sig Add to the signal bitmap of the target process , Next time CPU Read when scheduling
sigaddset(&pending->signal, sig); // Used to determine which process / The thread processes the signal , then wake_up This process / Threads
complete_signal(sig, t, group);
ret:
trace_signal_generate(sig, info, t, group, result);
return ret;
}
You can see , Finally call to __send_signal, Set the data structure of the signal , Wake up processes that need to process signals , The whole signal transmission process is over . At this time, the signal has not been processed by the process , Or a pending signal.
signal processing ( kernel )
When the kernel schedules the process , Would call do_notify_resume() To process the signals in the signal queue , Then this function will call do_signal(), Call again handle_signal(), No code is needed to explain the specific process , Finally, we will find the processing function of each signal , The problem is how to find the signal processing function ?
Remember what I mentioned above task_struct Do you , There's a member variable in it sighand_struct It is used to store the processing function of each signal .
struct sighand_struct {
atomic_t count; /* Reference count */
struct k_sigaction action[_NSIG]; /* Store the structure of the processing function */
spinlock_t siglock; /* spinlocks */
wait_queue_head_t signalfd_wqh; /* Waiting in line */
};
struct k_sigaction {
struct sigaction sa;
}
struct sigaction {
__sighandler_t sa_handler;
}
among sa_handler It points to the signal processing program .
边栏推荐
- Alertmanager sends the alarm email and specifies it as the Alibaba mailbox of the company
- Scratch epidemic isolation and nucleic acid detection Analog Electronics Society graphical programming scratch grade examination level 3 true questions and answers analysis June 2022
- Openharmony developer documentation open source project
- 【MySQL入门】第一话 · 初入“数据库”大陆
- C语言指针*p++、*(p++)、*++p、*(++p)、(*p)++、++(*p)对比实例
- 基于STM32+华为云IOT设计的智能路灯
- Xin'an Second Edition: Chapter 26 big data security demand analysis and security protection engineering learning notes
- Run xv6 system
- 【Android】Kotlin代码编写规范化文档
- C# NanoFramework 点灯和按键 之 ESP32
猜你喜欢
Grafana 9 is officially released, which is easier to use and more cool!

Establishment of graphical monitoring grafana
What is the reason why the video cannot be played normally after the easycvr access device turns on the audio?

【MySQL入门】第四话 · 和kiko一起探索MySQL中的运算符
![[rapid environment construction] openharmony 10 minute tutorial (cub pie)](/img/b5/feb9c56a65c3b07403710e23078a6f.jpg)
[rapid environment construction] openharmony 10 minute tutorial (cub pie)
Chrome prompts the solution of "your company management" (the startup page is bound to the company's official website and cannot be modified)
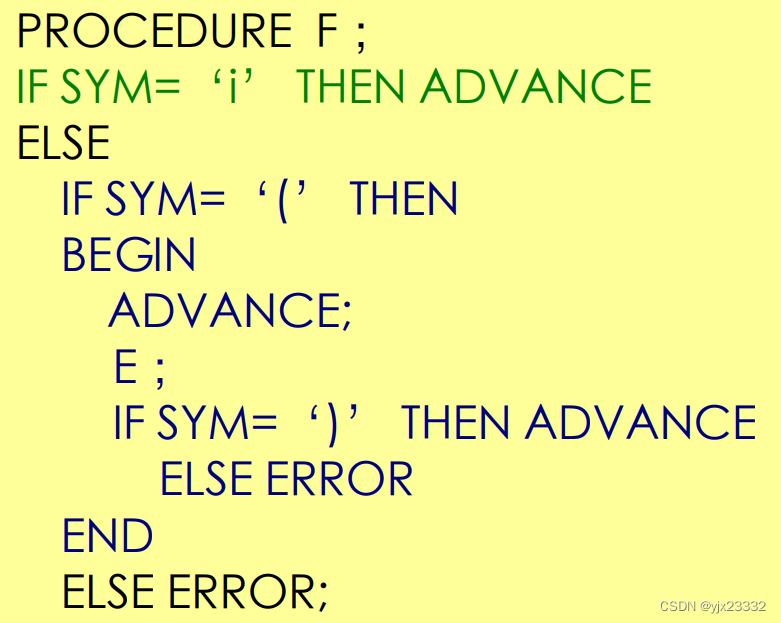
编译原理——自上而下分析与递归下降分析构造(笔记)

Open source and safe "song of ice and fire"

8位MCU跑RTOS有没有意义?

一体化实时 HTAP 数据库 StoneDB,如何替换 MySQL 并实现近百倍性能提升
随机推荐
二分(整数二分、实数二分)
EasyCVR授权到期页面无法登录,该如何解决?
【MySQL入门】第三话 · MySQL中常见的数据类型
Wechat applet obtains mobile number
kivy教程之在 Kivy 中支持中文以构建跨平台应用程序(教程含源码)
OpenEuler 会长久吗
在一台服务器上部署多个EasyCVR出现报错“Press any to exit”,如何解决?
Interview shock 62: what are the precautions for group by?
李书福为何要亲自挂帅造手机?
MarkDown语法——更好地写博客
带你穿越古罗马,元宇宙巴士来啦 #Invisible Cities
The easycvr authorization expiration page cannot be logged in. How to solve it?
The solution that flutterweb browser cannot be rolled back after refreshing
[elastic] elastic lacks xpack and cannot create template unknown setting index lifecycle. name index. lifecycle. rollover_ alias
BearPi-HM_ Nano development environment
高精度运算
【MySQL入门】第四话 · 和kiko一起探索MySQL中的运算符
Unity tips - draw aiming Center
78 岁华科教授逐梦 40 载,国产数据库达梦冲刺 IPO
VR panoramic wedding helps couples record romantic and beautiful scenes