当前位置:网站首页>Pandora IOT development board learning (HAL Library) - Experiment 3 key input experiment (learning notes)
Pandora IOT development board learning (HAL Library) - Experiment 3 key input experiment (learning notes)
2022-07-02 23:12:00 【Xiaohui_ Super】
This code refers to the punctual atomic routine
List of articles
Experimental function
Routine source code :(main.c)
This experiment realizes the control through key input LED and BEEP, The main knowledge involved is GPIO Input .
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "key.h"
#include "beep.h"
/********************************************************************************* ___ _ _____ _____ _ _ _____ _____ _ __ / _ \ | | |_ _|| ___|| \ | ||_ _|| ___|| | / / / /_\ \| | | | | |__ | \| | | | | |__ | |/ / | _ || | | | | __| | . ` | | | | __| | \ | | | || |_____| |_ | |___ | |\ | | | | |___ | |\ \ \_| |_/\_____/\___/ \____/ \_| \_/ \_/ \____/ \_| \_/ * ****************************************************************************** * The punctual atoms Pandora STM32L475 IoT Development board experiment 3 * Key input experiment HAL Library version * Technical support :www.openedv.com * Taobao shop :http://openedv.taobao.com * Focus on wechat public platform wechat :" The punctual atoms ", Free access STM32 Information . * Guangzhou Xingyi Electronic Technology Co., Ltd * author : The punctual atoms @ALIENTEK * ******************************************************************************/
int main(void)
{
u8 key;
HAL_Init();
SystemClock_Config(); // Initialize the system clock to 80M
delay_init(80); // Initialization delay function 80M The system clock
LED_Init(); // initialization LED
BEEP_Init(); // Initialize buzzer
KEY_Init(); // initialization KEY
while(1)
{
key = KEY_Scan(0); // Key scan , Continuous press is not supported
switch(key)
{
case WKUP_PRES: // Control the buzzer state to flip
BEEP_TogglePin;
break;
case KEY2_PRES: // control LED_B The red light status is reversed
LED_B_TogglePin;
break;
case KEY1_PRES: // control LED_G The green light status turns
LED_G_TogglePin;
break;
case KEY0_PRES: // control LED_R The blue light status turns over
LED_R_TogglePin;
break;
default:
break;
}
delay_ms(10);
}
}
Code analysis
HAL_Init()
HAL_Init() The definition is as follows :( See notes for specific functions )
HAL_StatusTypeDef HAL_Init(void)
{
HAL_StatusTypeDef status = HAL_OK;
/* To configure Flash Prefetch , Instruction cache , Data caching */
/* Default configuration is : Pre access is closed Instruction cache and data cache are enabled */
#if (INSTRUCTION_CACHE_ENABLE == 0) // Flash Enable pre access configuration , Can accelerate CPU Execution of code
__HAL_FLASH_INSTRUCTION_CACHE_DISABLE();
#endif /* INSTRUCTION_CACHE_ENABLE */
#if (DATA_CACHE_ENABLE == 0)
__HAL_FLASH_DATA_CACHE_DISABLE();
#endif /* DATA_CACHE_ENABLE */
#if (PREFETCH_ENABLE != 0)
__HAL_FLASH_PREFETCH_BUFFER_ENABLE();
#endif /* PREFETCH_ENABLE */
/* Set Interrupt Group Priority */
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_2); // To configure NVIC Priority groups
/* Use SysTick as time base source and configure 1ms tick (default clock after Reset is MSI) */
if (HAL_InitTick(TICK_INT_PRIORITY) != HAL_OK) // Initialize tick timer , The clock beat is set to 1ms
{
status = HAL_ERROR;
}
else
{
/* Init the low level hardware */
HAL_MspInit(); // Low speed peripheral initialization , such as GPIO、 Interrupt, etc ( Use STM32CubeMx Low speed peripherals are initialized when generating code
// The code is in this kind of function , In other cases, this function can be ignored
}
/* Return function status */
return status;
}
HAL_InitTick()
Tick timer clock beat initialization function
__weak HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
HAL_StatusTypeDef status = HAL_OK;
/*Configure the SysTick to have interrupt in 1ms time basis*/
if (HAL_SYSTICK_Config(SystemCoreClock/1000UL) != 0U) // The system clock /1000, The interruption period is 1ms
{
status = HAL_ERROR;
}
else
{
/*Configure the SysTick IRQ priority */
HAL_NVIC_SetPriority(SysTick_IRQn, TickPriority, 0); // Set the interrupt priority of the tick timer to the highest
}
/* Return function status */
return status;
}
SystemClock_Config()
SystemClock_Config() The function is defined as follows :( See notes for specific functions , For reference only )
void SystemClock_Config(void)
{
HAL_StatusTypeDef ret = HAL_OK;
RCC_OscInitTypeDef RCC_OscInitStruct; // Define oscillator initialization structure variables
RCC_ClkInitTypeDef RCC_ClkInitStruct; // Define clock initialization structure variables
__HAL_RCC_PWR_CLK_ENABLE(); // Enable power control clock
/*Initializes the CPU, AHB and APB busses clocks*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; // take HSE( External high-speed clock ) As a clock source
RCC_OscInitStruct.HSEState = RCC_HSE_ON; // Turn on HSE
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; // Turn on PLL( PLL )
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; // take HSE As PLL The clock source of
RCC_OscInitStruct.PLL.PLLM = 1; // PLL-VCO Input clock frequency division coefficient ,1 Express 2 frequency division (8 / 2 = 4M, The external crystal oscillator frequency of the development board is 8MHz)
RCC_OscInitStruct.PLL.PLLN = 20; // PLL-VCO Output clock frequency multiplication coefficient ,4 * 20 = 80M, That is, the output clock frequency is 80MHz
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV7; // SAI Frequency division coefficient of clock
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2; // SDMMC1, RNG and USB Clock frequency division coefficient
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2; // Frequency division coefficient of the main system clock
ret = HAL_RCC_OscConfig(&RCC_OscInitStruct); // Initialize clock configuration
if(ret != HAL_OK) while(1);
/*Initializes the CPU, AHB and APB busses clocks*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK
| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2; // Configure all clocks at the same time
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; // take PLL As the clock source of the system
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; // AHB Regardless of the frequency
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; // APB1 Regardless of the frequency
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; // APB2 Regardless of the frequency
ret = HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4); // Configure the initial structure variable of the clock ,
// Use Flash Delay 4, Wait state ( Delay ) The quantity of should be according to CPU The clock (HCLK) Frequency and internal voltage range , How to
// Please refer to the chip manual
if(ret != HAL_OK) while(1);
/*Configure the main internal regulator output voltage*/
ret = HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1); // Internal register output voltage configuration
// Here is HAL_PWREx_ControlVoltageScaling() Part of the function description :
//PWR_REGULATOR_VOLTAGE_SCALE1 Regulator voltage output range 1 mode, typical output voltage
// at 1.2 V, system frequency up to 80 MHz.
if(ret != HAL_OK) while(1);
}
delay_init()
The tick timer is already HAL_Init() Initialization in , The following function is actually for fac_us Given a value ( At present, the operating system is not involved , Other code will not be studied for the time being ).
static u32 fac_us = 0; //us Delay multiplier
/** * @brief Initialization delay function ,SYSTICK The clock is fixed to AHB The clock * * @param SYSCLK System clock frequency * * @return void */
void delay_init(u8 SYSCLK)
{
#if SYSTEM_SUPPORT_OS // If support is needed OS.
u32 reload;
#endif
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);//SysTick The frequency is HCLK
fac_us = SYSCLK; // Whether used or not OS,fac_us You need to use
#if SYSTEM_SUPPORT_OS // If support is needed OS.
reload = SYSCLK; // The number of counts per second Unit is K
reload *= 1000000 / delay_ostickspersec; // according to delay_ostickspersec Set the overflow time
//reload by 24 Bit register , Maximum :16777216, stay 80M Next , about 209.7ms about
fac_ms = 1000 / delay_ostickspersec; // representative OS The minimum unit that can delay
SysTick->CTRL |= SysTick_CTRL_TICKINT_Msk; // Turn on SYSTICK interrupt
SysTick->LOAD = reload; // Every time 1/OS_TICKS_PER_SEC Second break once
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk; // Turn on SYSTICK
#else
#endif
}
KEY_Init()
/** * @brief Key initialization function * * @param void * * @return void */
void KEY_Init(void)
{
/* KEY0 - PD10 KEY1 - PD9 KEY2 - PD8 WK_UP - PC13 */
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOC_CLK_ENABLE(); // Turn on GPIOC The clock
__HAL_RCC_GPIOD_CLK_ENABLE(); // Turn on GPIOD The clock
GPIO_Initure.Pin = GPIO_PIN_8 | GPIO_PIN_9 | GPIO_PIN_10 ; //PD8.9.10
GPIO_Initure.Mode = GPIO_MODE_INPUT; // Input
GPIO_Initure.Pull = GPIO_PULLDOWN; // The drop-down
GPIO_Initure.Speed = GPIO_SPEED_HIGH; // High speed
HAL_GPIO_Init(GPIOD, &GPIO_Initure);
GPIO_Initure.Pin = GPIO_PIN_13; //PC13
GPIO_Initure.Mode = GPIO_MODE_INPUT; // Input
GPIO_Initure.Pull = GPIO_PULLUP; // Pull up
GPIO_Initure.Speed = GPIO_SPEED_HIGH; // High speed
HAL_GPIO_Init(GPIOC, &GPIO_Initure);
}
delay_ms()
delay_ms() What runs in the is delay_us(), delay_us() Delay by ticking timer . above delay_init() Have already put fac_us Set up in order to 80, Tick timer counts 80 Time required 10-6 second ( The system clock is 80MHz), namely 1us.
/** * @brief Delay milliseconds (ms) function * * @param nms How many milliseconds does it take * * @return void */
void delay_ms(u16 nms)
{
u32 i;
for(i = 0; i < nms; i++) delay_us(1000);
}
/** * @brief Delay microseconds (us) function * * @remark nus:0~190887435( The maximum value is 2^32/[email protected]_us=22.5) * * @param nus How many microseconds do you need to delay * * @return void */
void delay_us(u32 nus)
{
u32 ticks;
u32 told, tnow, tcnt = 0;
u32 reload = SysTick->LOAD; //LOAD Value
ticks = nus * fac_us; // The number of beats needed
told = SysTick->VAL; // Counter value at the time of first entry
while(1)
{
tnow = SysTick->VAL;
if(tnow != told)
{
if(tnow < told)tcnt += told - tnow; // Notice here SYSTICK It's a decreasing counter .
else tcnt += reload - tnow + told;
told = tnow;
if(tcnt >= ticks)break; // For more than / Equal to the time to delay , The exit .
}
}
}
KEY_Scan()
The most basic functions of key scanning are the following four , That is, read the corresponding IO The level state of ,
#define KEY0 HAL_GPIO_ReadPin(GPIOD,GPIO_PIN_10)
#define KEY1 HAL_GPIO_ReadPin(GPIOD,GPIO_PIN_9)
#define KEY2 HAL_GPIO_ReadPin(GPIOD,GPIO_PIN_8)
#define WK_UP HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_13)
The following key scanning mechanism should be familiar to you , It's easy to understand :
/** * @brief Key handling functions * * @remark Note that this function has response priority ,KEY0>KEY1>KEY2>WK_UP!! * * @param mode 0: Continuous press is not supported ,1: Support continuous press * * @return u8 Return to key value * 0: There's no key press ,1:KEY0 Press down ,2:KEY1 Press down ,3:KEY2 Press down ,4:WK_UP Press down */
u8 KEY_Scan(u8 mode)
{
static u8 key_up = 1; // Key release sign
if(mode == 1)key_up = 1; // Support to click
if(key_up && (KEY0 == 0 || KEY1 == 0 || KEY2 == 0 || WK_UP == 1))
{
delay_ms(10);
key_up = 0;
if(KEY0 == 0) return KEY0_PRES;
else if(KEY1 == 0) return KEY1_PRES;
else if(KEY2 == 0) return KEY2_PRES;
else if(WK_UP == 1) return WKUP_PRES;
}
else if(KEY0 == 1 && KEY1 == 1 && KEY2 == 1 && WK_UP == 0)key_up = 1;
return 0; // No key press
}
LED BEEP Operation function
LED And the control function of the buzzer is a macro function , We used HAL_GPIO_WritePin() and HAL_GPIO_TogglePin() Two library functions .
#define LED_R(n) (n?HAL_GPIO_WritePin(GPIOE,GPIO_PIN_7,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOE,GPIO_PIN_7,GPIO_PIN_RESET))
#define LED_R_TogglePin HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_7)
#define LED_G(n) (n?HAL_GPIO_WritePin(GPIOE,GPIO_PIN_8,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOE,GPIO_PIN_8,GPIO_PIN_RESET))
#define LED_G_TogglePin HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_8)
#define LED_B(n) (n?HAL_GPIO_WritePin(GPIOE,GPIO_PIN_9,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOE,GPIO_PIN_9,GPIO_PIN_RESET))
#define LED_B_TogglePin HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_9)
#define BEEP(n) (n?HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_SET):HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_RESET))
#define BEEP_TogglePin HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_2)
Interrupt service function
Four buttons
/** * @brief EXTI9_5 Interrupt service function * * @param void * * @return void */
void EXTI9_5_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_8);// Call the interrupt handling common function
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_9);// Call the interrupt handling common function
}
/** * @brief EXTI15_10 Interrupt service function * * @param void * * @return void */
void EXTI15_10_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_10);// Call the interrupt handling common function
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_13);// Call the interrupt handling common function
}
边栏推荐
- Typical case of data annotation: how does jinglianwen technology help enterprises build data solutions
- 20220527_ Database process_ Statement retention
- 从底层结构开始学习FPGA----Xilinx ROM IP的定制与测试
- 中国信通院、清华大学、腾讯安全,云原生安全产学研用强强联合!
- 门牌制作 C语言
- Boot actuator - Prometheus use
- [Solved] Splunk: Cannot get username when all users are selected“
- Splunk audit 的设定
- Detailed explanation and application of merging and sorting
- Learning Websites commonly used by circuit designers
猜你喜欢

首批 | 腾讯云完成国内首个云原生安全成熟度评估
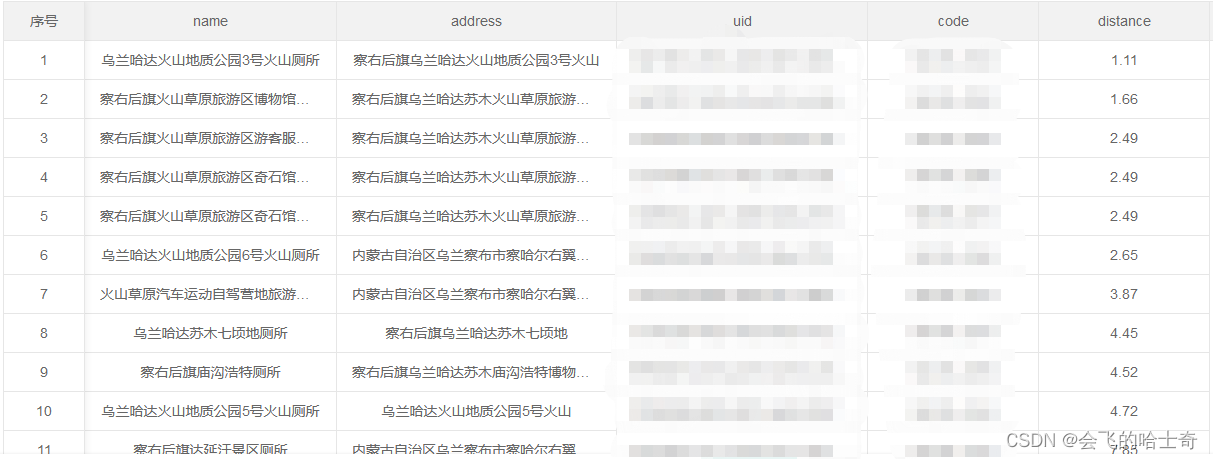
MySQL queries nearby data And sort by distance

从底层结构开始学习FPGA----Xilinx ROM IP的定制与测试

力扣刷题(2022-6-28)

地平线2022年4月最新方案介绍

创新实力再获认可!腾讯安全MSS获2022年度云原生安全守护先锋
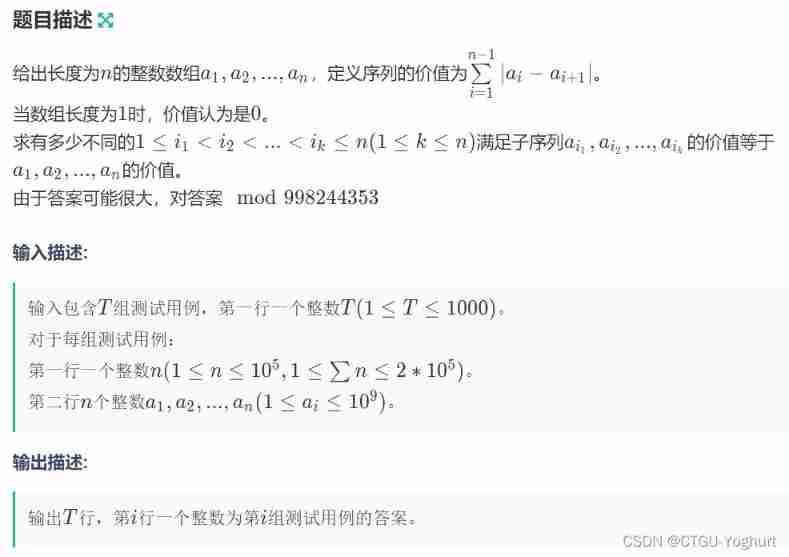
Value sequence < detailed explanation of daily question >

中国信通院、清华大学、腾讯安全,云原生安全产学研用强强联合!
![[Solved] Splunk: Cannot get username when all users are selected“](/img/13/1e824c8005701e21fc5b4e73308d53.png)
[Solved] Splunk: Cannot get username when all users are selected“

Redis 过期策略+conf 记录
随机推荐
STM32串口DAM接收253字节就死机原因排查
Use the scroll bar of souI when using the real window in souI
提交代码流程
Static file display problem
Prometheus deployment
golang入门:for...range修改切片中元素的值的另类方法
Set right click to select vs code to open the file
2016. 增量元素之间的最大差值
P7072 [csp-j2020] live broadcast Award
Learning Websites commonly used by circuit designers
C#中Linq用法汇集
20220527_数据库过程_语句留档
Is 408 not fragrant? The number of universities taking the 408 examination this year has basically not increased!
Sword finger offer II 099 Sum of minimum paths - double hundred code
[Solved] Splunk: Cannot get username when all users are selected“
静态文件显示问题
Go multithreaded data search
Alibaba cloud award winning experience: how to use polardb-x
移动端 1px 像素兼容性问题,实现1px 边框
The motivation of AES Advanced Encryption Protocol