摘要:本文以Diagonal算子为例,介绍并详细讲解如何利用迭代器对n维Tensor进行基于位置坐标的大批量数据读取工作。
本文分享自华为云社区《CANN算子:利用迭代器高效实现Tensor数据切割分块处理》,作者: CatherineWang 。
任务场景及目标
在CANN aicpu算子开发实现中,经常需要对n维Tensor进行切片(slice)、切块(dice)、转置(transpose)、交换指定维度数据(shuffle)等操作。上述操作实质上是按照指定规律依次进行数据读取,并将读取到的数据写入新的数据地址中。
本文以Diagonal算子为例,介绍并详细讲解如何利用迭代器对n维Tensor进行基于位置坐标的大批量数据读取工作。
Diagonal算子希望对指定两个维度的数据进行对角元素的提取,最终返回张量的对角线元素。本质上该算子通过属性dim1和dim2确定一个矩阵,返回该矩阵的对角元素(存在偏移量offset),并将其放置在最后一维。非dim1和dim2的维度,将会被当成batch维度处理。
常规方案:
方案一:将shape为s,元素个数为numel的 输入Tensor:x转化为Eigen::Tensor:eigen_x;对eigen_x进行shuffle操作,将dim1和dim2换至倒数第二和倒数第一维;通过reshape操作将eigen_x变化为一个三维Eigen::Tensor:reshape_x,shape=(numel/ s[dim1]/s[dim2],s[dim1],s[dim2]);对后两维数据取对角元素,并将最终数据赋值给输出数据地址。注意:由于Eigen::Tensor<typename T, int NumIndices_>不能够动态设置维度,即NumIndices_项必须是一个具体的值,因此需要提前定义对应维度的Eigen::Tensor备用。
方案二:对于一个n维的Tensor,利用n层for循环进行数据的定位读取,并取对角值。
可以看出上述两个方案对动态大小的输入计算实现处理都较为繁琐,需要提前分情况设置对应维度的Eigen::Tensor或是for循环逻辑结构,即存在维数限制。
准备知识及分析
我们知道再AICPU中,对于一个Tensor,我们能够通过GetTensorShape、GetData等函数获得Tensor形状大小、具体数据地址等信息。但我们不能通过位置坐标的形式直接获得指定位置的数据值。
1.步长
首先介绍步长(stride)这一概念(对这部分知识已掌握的可以直接跳转下一部分内容)。stride是在指定维度dim中从一个元素跳到下一个元素所必需的步长。例如,对于一个shape=(2, 3, 4, 5)的Tensor,其stride=(60, 20, 5, 1)。因此如果想要获取到上述Tensor中位置坐标为[1, 2, 1, 3]的数据,只需要找到数据地址中第108(=60*1+20*2+5*1+3)位对应值。
2.迭代器
定义迭代器PositionIterator,包含私有成员pos_和shape_,其中pos_为初始位置,shape_为标准形状。通过重载++符号,对pos_进行修改,实现迭代器的自增操作。基于上述迭代器,可以实现对给定的shape依次取位操作。如给定对于给定的shape=(d_1,d_2,…,d_n),从初始位置(0,0,…,0)开始,依次取(0,0,…,0,0), (0,0,…,0,1),…,(0,0,…,0,d_n-1), (0,0,…,1,0), (0,0,…,1,1),…, (d_1 - 1,d_2 - 1,…,d_{n-1}-1,d_{n}-1).
事实上,可以将上述迭代器理解为一种进制,对于给定的标准形状shape_=(d_1,d_2,…,d_n),第i位运算时便是逢d_i进1。同时通过PositionIterator .End()控制迭代器的结束。具体实现如下:
template <typename T> class PositionIterator { public: PositionIterator(){}; ~PositionIterator(){}; PositionIterator(std::vector<T> stt, std::vector<T> sh) { if (stt.size() != sh.size()) { PositionIterator(); } else { for (unsigned int i = 0; i < sh.size(); i++) { if (stt[i] >= sh[i]) { PositionIterator(); } } pos_ = stt; shape_ = sh; } } PositionIterator operator++() { pos_[shape_.size() - 1] += 1; for (unsigned int i = shape_.size() - 1; i > 0; i--) { if (pos_[i] / shape_[i] != 0) { pos_[i - 1] += pos_[i] / shape_[i]; pos_[i] = pos_[i] % shape_[i]; } } return *this; } bool End() { if (pos_[0] != shape_[0]) { return false; } return true; } std::vector<T> GetPos() { return pos_; } std::vector<T> GetShape() { return shape_; } private: std::vector<T> pos_; std::vector<T> shape_; };
Diagonal算子的实现
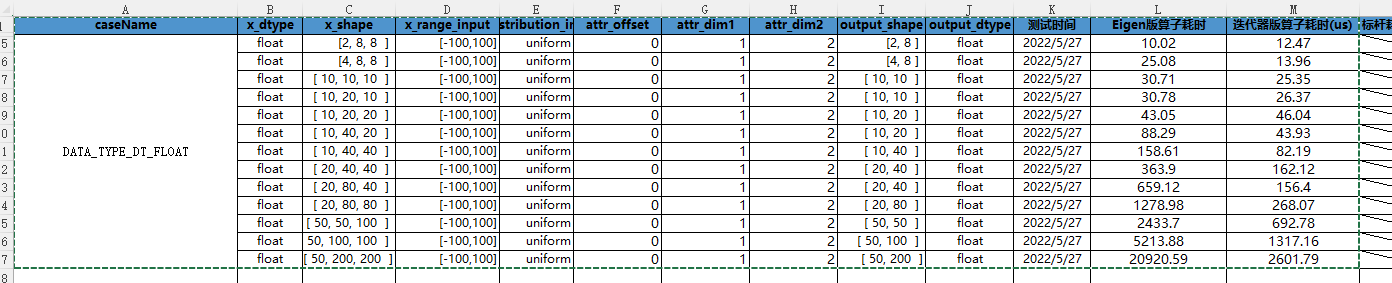
利用迭代器,在一般情况下,我们只需要两层for循环,便可以实现Diagonal算子的计算过程。第一层for循环用于确定除dim1和dim2维度的位置坐标,第二层for循环用于对dim1和dim2对应维度确定对角元素位置,通过这样的两层for循环,便可将对角元素位置确定。通过这样的取值处理,相较于Eigen实现思路,计算速度有着明显的提升,且无维度限制,st测试结果对比如下:
具体实现可参见如下代码:
template <typename T> uint32_t DiagonalCpuKernel::DoComputeType(CpuKernelContext &ctx, const int64_t &offset, const int64_t &dim1, const int64_t &dim2) { // Get the inuput and output Tensor *input_x = ctx.Input(0); Tensor *y = ctx.Output(0); // Get some information of input auto x_shape = input_x->GetTensorShape(); std::vector<int64_t> x_shape_ = x_shape->GetDimSizes(); const int64_t x_dim = x_shape->GetDims(); auto dataptr = reinterpret_cast<T *>(ctx.Input(0)->GetData()); auto y_dataptr = reinterpret_cast<T *>(y->GetData()); // Compute // 首先计算出对角线元素个数 int64_t dsize = OffsetSize(offset, dim1, dim2, x_shape_); // 生成输入Tensor的步长向量x_stride std::vector<int64_t> x_stride = ConstructStride<int64_t>(x_shape_); // 分情况讨论,2维和大于2维的情况 if (x_dim != N2) { //set the vx_shape and vx_stride // 生成x_shape和x_stride中除去dim1和dim2对应值的vx_shape与vx_stride std::vector<int64_t> vx_shape, vx_stride; for (unsigned int tmp_dim = 0; tmp_dim < x_shape_.size(); tmp_dim++) { if (tmp_dim != dim1 && tmp_dim != dim2) { vx_shape.push_back(x_shape_[tmp_dim]); vx_stride.push_back(x_stride[tmp_dim]); } } // set the y_shape, y_stride, vy_stride // 生成输出Tensor的形状及步长向量:y_shape和y_stride std::vector<int64_t> y_shape = vx_shape; y_shape.push_back(dsize); std::vector<int64_t> y_stride = ConstructStride<int64_t>(y_shape); // 生成输出Tensor的出去最后一维的步长向量:vy_stride std::vector<int64_t> vy_stride = y_stride; vy_stride.pop_back(); // 读取对角数据 std::vector<int64_t> v_start(vx_shape.size(), 0); for (PositionIterator<int64_t> myiter(v_start, vx_shape); !myiter.End(); ++myiter) { // 利用迭代器确定除dim1和dim2维度的位置坐标 auto p = myiter.GetPos(); // 通过步长向量和位置坐标计算出输入和输出的基础位置值base_pos1和outbase_pos int64_t base_pos1 = MulSum<int64_t>(p, vx_stride); int64_t outbase_pos = MulSum<int64_t>(p, vy_stride); for (int i = 0; i < dsize; i++) { // 结合前面计算出的基础位置值,对dim1和dim2对应维度确定对角元素位置,并赋值给输出数据地址(get_data涉及对上对角还是下对角取元素,不影响对迭代器作用的理解) int64_t base_pos2 = i * (x_stride[dim1] + x_stride[dim2]); int64_t arr[N2] = {x_stride[dim1], x_stride[dim2]}; y_dataptr[outbase_pos + i] = get_data(base_pos1 + base_pos2, offset, arr, dataptr); } } } else { for (int i = 0; i < dsize; i++) { int64_t base_pos = i * (x_stride[dim1] + x_stride[dim2]); int64_t arr[N2] = {x_stride[dim1], x_stride[dim2]}; y_dataptr[i] = get_data(base_pos, offset, arr, dataptr); } } return KERNEL_STATUS_OK; }
迭代器的其他用法
1、数据切条:如Sort算子中,用迭代器对Tensor数据关于tmp_axis维度进行取条,以进行后续的排序操作。
for (position_iterator<int64_t> mit(v_start, v_shape); !mit.end(); ++mit) { auto p = mit.get_pos(); int axis_len = input_shape_[tmp_axis]; std::vector<ValueIndex<T>> data_(axis_len); int base_pos = mul_sum<int64_t>(p, v_stride); for (int32_t i = 0; i < axis_len; i++) { data_[i].value = x_dataptr[base_pos + i * input_stride[tmp_axis]]; data_[i].index = i; }
2、数据切块:切块处理可以利用两个迭代器循环叠加,也可以利用一个迭代器和两个坐标位置for循环
3、关于指定维度dim,对Tensor降维拆分为N子Tensor:如UniqueConsecutive算子中,首先需要关于属性axis维,将原本的Tensor数据拆分为input_shape[axis]个子Tensor(此处用vector存储Tensor中的数据)。
std::vector<std::vector<T1>> data_; for (int64_t i = 0; i < dim0; i++) { std::vector<T1> tmp_v1; for (PositionIterator<int64_t> mit(v_start, v_shape); !mit.End(); ++mit) { auto pos = mit.GetPos(); tmp_v1.push_back( x_dataptr[MulSum<int64_t>(pos, v_stride) + i * input_stride[axis]]); } data_.push_back(tmp_v1); }

![Cadence physical library lef file syntax learning [continuous update]](/img/d5/0671935b074e538a2147dbe51a5a70.jpg)