当前位置:网站首页>The intelligent material transmission system of the 6th National Games of the Blue Bridge Cup
The intelligent material transmission system of the 6th National Games of the Blue Bridge Cup
2022-07-06 02:07:00 【Miseñor】
This one is much simpler than previous ones , Finally, I can finish all the tasks smoothly . Among them, we should pay attention to two times eeprom In the process of data saving, we need a small delay, Or you'll make a mistake !
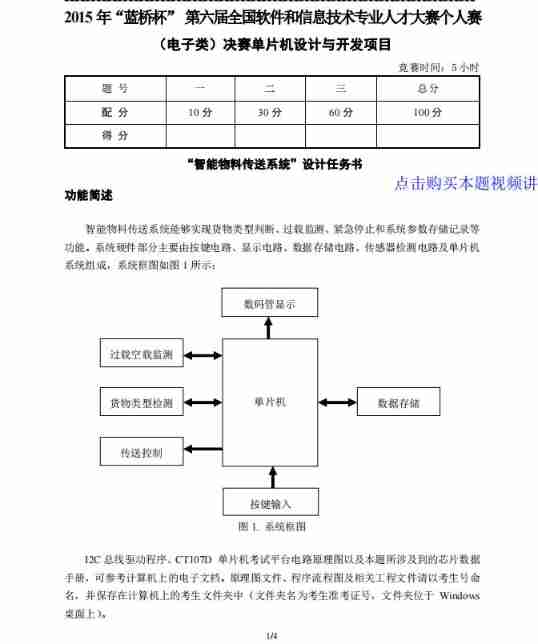
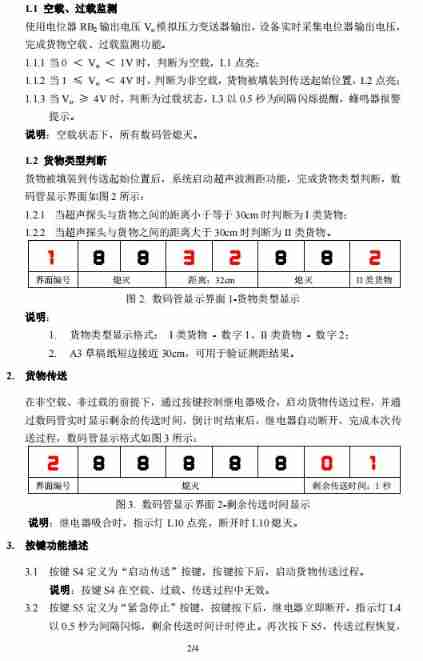
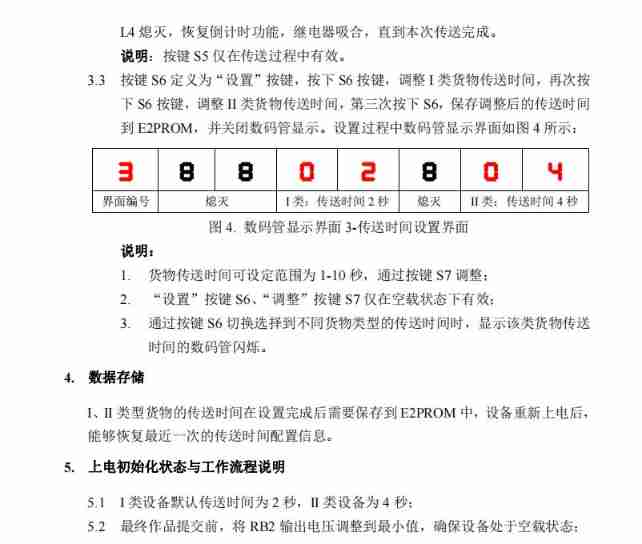
subject :
Code :
main.c
#include <STC12C5A60S2.H>
#include"intrins.h"
#include"iic.h"
sbit TX=P1^0;
sbit RX=P1^1;
int led_work=0xff;
int rb_2;
int L3_mode=0;
int distance;
int Y5_work=0x00;
char last_time_1=2;// Delivery time of class I goods
char last_time_2=4;// Delivery time of class II goods
int weight_mode=0;
int smg_mode=1;
int work_mode; // Type of goods
sbit S4=P3^3;
sbit S5=P3^2;
sbit S6=P3^1;
sbit S7=P3^0;
int running=0;// Whether to run
int last_time;
int L4_work=0;
int set_mode=0;
unsigned int code xianshi[]={
0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff};
void choose_573(int i)
{
switch(i)
{
case(0):P2=(P2&0x1f)|0x00;break;
case(4):P2=(P2&0x1f)|0x80;break;
case(5):P2=(P2&0x1f)|0xa0;break;
case(6):P2=(P2&0x1f)|0xc0;break;
case(7):P2=(P2&0x1f)|0xe0;break;
}
}
void init_system()
{
choose_573(4);
P0=0xff;
choose_573(5);
P0=0x00;
choose_573(0);
}
//============================== Timer 0
void Timer0Init(void) //5 millisecond @11.0592MHz
{
AUXR |= 0x80; // Timer clock 1T Pattern
TMOD &= 0xF0; // Set timer mode
TL0 = 0x00; // Set the initial timing value
TH0 = 0x28; // Set the initial timing value
TF0 = 0; // eliminate TF0 sign
TR0 = 1; // Timer 0 Start timing
ET0=1;
EA=1;
}
int count_1=0;int count_2=0;
void service_timer0() interrupt 1
{
count_1++;
if(count_1>=100)
{
count_1=0;
L3_mode++;
if(L3_mode>=2)
{
L3_mode=0;
}
}
if(running!=0&&last_time!=0)
{
count_2++;
if(count_2>=200)
{
count_2=0;
last_time--;
if(last_time==0)
{
running=0;
smg_mode=1;
Y5_work=(Y5_work&0xef)|0x00;
choose_573(5);
P0=Y5_work;
choose_573(0);
}
}
}
}
//==============================
//==============================led
void rb_2_display()
{
rb_2=get_rb2();
}
void led_display()
{
//L1
if(rb_2<100)
{
weight_mode=1;
led_work=(led_work&0xfe)|0x00;
choose_573(4);
P0=led_work;
choose_573(0);
}
else
{
led_work=(led_work&0xfe)|0x01;
choose_573(4);
P0=led_work;
choose_573(0);
}
//L2
if(rb_2>=100&&rb_2<400)
{
weight_mode=2;
led_work=(led_work&0xfd)|0x00;
choose_573(4);
P0=led_work;
choose_573(0);
}
else
{
led_work=(led_work&0xfd)|0x02;
choose_573(4);
P0=led_work;
choose_573(0);
}
//L3
if(rb_2>=400&&L3_mode==1)
{
weight_mode=3;
led_work=(led_work&0xfb)|0x00;
Y5_work=(Y5_work&0xbf)|0x40;
choose_573(4);
P0=led_work;
choose_573(5);
P0=Y5_work;
choose_573(0);
}
else if(rb_2>=400&&L3_mode==0)
{
weight_mode=3;
led_work=(led_work&0xfb)|0x04;
Y5_work=(Y5_work&0xbf)|0x40;
choose_573(4);
P0=led_work;
choose_573(5);
P0=Y5_work;
choose_573(0);
}
else if(rb_2<400)
{
led_work=(led_work&0xfb)|0x04;
Y5_work=(Y5_work&0xbf)|0x00;
choose_573(4);
P0=led_work;
choose_573(5);
P0=Y5_work;
choose_573(0);
}
}
//==============================
//============================== ultrasonic
void Delay12us() //@12.000MHz
{
unsigned char i;
_nop_();
_nop_();
i = 33;
while (--i);
}
void send_wave()
{
int i;
for(i=0;i<8;i++)
{
TX=1;
Delay12us();
TX=0;
Delay12us();
}
}
void get_distance()
{
unsigned int time=0;
AUXR |= 0x40; // Timer clock 1T Pattern
TMOD &= 0x0F; // Set timer mode
TL1 = 0x00; // Set the initial timing value
TH1 = 0x00; // Set the initial timing value
TF1 = 0; // eliminate TF1 sign
TR1 = 0; // Timer 1 Start timing
send_wave();
TR1=1;
while(RX==1&&TF1==0);
TR1=0;
if(TF1==0)
{
time=TH1;
time=(time<<8)|TL1;
distance=time*0.017;
distance=distance/12;
}
else
{
distance=999;
TF1=0;
}
TH1=TL1=0;
if(distance<=30)
{
work_mode=1;
}
else if(distance>30)
{
work_mode=2;
}
}
//==============================
//============================== Key
void Delay10ms() //@11.0592MHz
{
unsigned char i, j;
i = 108;
j = 145;
do
{
while (--j);
} while (--i);
}
void key_board()
{
//S4
if(S4==0&&weight_mode==2)
{
Delay10ms();
if(S4==0&&weight_mode==2)
{
smg_mode=2;
Y5_work=(Y5_work&0xef)|0x10;
choose_573(5);
P0=Y5_work;
choose_573(0);
running=1;
if(work_mode==1)
{
last_time=last_time_1;
}
if(work_mode==2)
{
last_time=last_time_2;
}
}
while(!S4);
}
//S5
if(S5==0&&smg_mode==2)
{
Delay10ms();
if(S5==0&&smg_mode==2)
{
if(running==1)
{
running=0;
Y5_work=(Y5_work&0xef)|0x00;
choose_573(5);
P0=Y5_work;
choose_573(0);
L4_work=1;
}
else
{
running=1;
Y5_work=(Y5_work&0xef)|0x10;
choose_573(5);
P0=Y5_work;
choose_573(0);
L4_work=0;
}
}
while(!S5);
}
//S6
if(S6==0&&weight_mode==1)
{
Delay10ms();
if(S6==0&&weight_mode==1)
{
smg_mode=3;
set_mode++;
if(set_mode>=3)
{
set_mode=0;
smg_mode=1;
}
}
while(!S6);
}
//S7
if(S7==0&&smg_mode==3)
{
Delay10ms();
if(S7==0&&smg_mode==3)
{
if(set_mode==1)
{
last_time_1++;
if(last_time_1>10)
{
last_time_1=1;
}
}
if(set_mode==2)
{
last_time_2++;
if(last_time_2>10)
{
last_time_2=1;
}
}
}
while(!S7);
}
}
//==============================
//==============================L4
void L4_display()
{
if(L4_work==1)
{
if(L3_mode==1)
{
led_work=(led_work&0xf7)|0x00;
choose_573(4);
P0=led_work;
choose_573(0);
}
else
{
led_work=(led_work&0xf7)|0x08;
choose_573(4);
P0=led_work;
choose_573(0);
}
}
else if(L4_work==0)
{
led_work=(led_work&0xf7)|0x08;
choose_573(4);
P0=led_work;
choose_573(0);
}
}
//==============================
//==============================smg
void Delay400us() //@11.0592MHz
{
unsigned char i, j;
i = 5;
j = 74;
do
{
while (--j);
} while (--i);
}
void SMG(int wei,int dat)
{
choose_573(6);
P0=0x80>>(wei-1);
choose_573(7);
P0=xianshi[dat];
choose_573(0);
Delay400us();
choose_573(7);
P0=xianshi[10];
choose_573(0);
}
void smg_display()
{
// test
// SMG(1,distance%10);
// SMG(2,(distance%100)/10);
// SMG(3,(distance%1000)/100);
// SMG(4,weight_mode);
// SMG(5,10);
// SMG(6,smg_mode);
// SMG(7,10);
// SMG(8,10);
if(smg_mode==1)
{
SMG(1,work_mode);
SMG(2,10);
SMG(3,10);
SMG(4,distance%10);
SMG(5,(distance%100)/10);
SMG(6,10);
SMG(7,10);
SMG(8,smg_mode);
}
if(smg_mode==2)
{
SMG(1,last_time%10);
SMG(2,(last_time%100)/10);
SMG(3,10);
SMG(4,10);
SMG(5,10);
SMG(6,10);
SMG(7,10);
SMG(8,smg_mode);
}
if(smg_mode==3)
{
if(set_mode==2&&L3_mode==1)
{
SMG(1,last_time_2%10);
SMG(2,(last_time_2%100)/10);
}
else if(set_mode==2&&L3_mode==0)
{
SMG(1,10);
SMG(2,10);
}
else if(set_mode!=2)
{
SMG(1,last_time_2%10);
SMG(2,(last_time_2%100)/10);
}
SMG(3,10);
if(set_mode==1&&L3_mode==1)
{
SMG(4,last_time_1%10);
SMG(5,(last_time_1%100)/10);
}
else if(set_mode==1&&L3_mode==0)
{
SMG(4,10);
SMG(5,10);
}
else if(set_mode!=1)
{
SMG(4,last_time_1%10);
SMG(5,(last_time_1%100)/10);
}
SMG(6,10);
SMG(7,10);
SMG(8,smg_mode);
}
}
//==============================
//==============================eeprom
void eeprom_work()
{
if(set_mode==0)
{
write_EEPROM(0x01,last_time_1);
Delay10ms();
write_EEPROM(0x33,last_time_2);
}
}
//==============================
void main()
{
init_system();
Timer0Init();
last_time_1=read_EEPROM(0x01);
Delay10ms();
last_time_2=read_EEPROM(0x33);
while(1)
{
rb_2_display();
led_display();
smg_display();
get_distance();
key_board();
L4_display();
eeprom_work();
}
}
iic.c
/* Program description : IIC Bus driver Software environment : Keil uVision 4.10 Hardware environment : CT107 SCM comprehensive training platform 8051,12MHz Japan period : 2011-8-9 */
#include "reg52.h"
#include "intrins.h"
#define DELAY_TIME 5
#define SlaveAddrW 0xA0
#define SlaveAddrR 0xA1
// Bus pin definition
sbit SDA = P2^1; /* cable */
sbit SCL = P2^0; /* Clock line */
void IIC_Delay(unsigned char i)
{
do{
_nop_();}
while(i--);
}
// Bus start condition
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
// Bus stop condition
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
// Send reply
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit; // 0: The reply ,1: Non response
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
// Waiting for an answer
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
// adopt I2C The bus sends data
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
// from I2C Data is received on the bus
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
int temp_1;
int get_rb2()
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x03);
IIC_WaitAck();
IIC_Stop();
IIC_Start();
IIC_SendByte(0x91);
IIC_WaitAck();
temp_1=IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
temp_1=temp_1*1.96+0.5;
return temp_1;
}
void write_EEPROM(int add,int dat)
{
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_SendByte(dat);
IIC_WaitAck();
IIC_Stop();
}
int read_EEPROM(int add)
{
int temp;
IIC_Start();
IIC_SendByte(0xa0);
IIC_WaitAck();
IIC_SendByte(add);
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);
IIC_WaitAck();
temp=IIC_RecByte();
IIC_SendAck(1);
IIC_Stop();
return temp;
}
iic.h
#ifndef _IIC_H
#define _IIC_H
void IIC_Start(void);
void IIC_Stop(void);
bit IIC_WaitAck(void);
void IIC_SendAck(bit ackbit);
void IIC_SendByte(unsigned char byt);
unsigned char IIC_RecByte(void);
int get_rb2();
read_EEPROM(int add);
write_EEPROM(int add,int dat);
#endif
边栏推荐
- Using SA token to solve websocket handshake authentication
- 01.Go语言介绍
- NiO related knowledge (II)
- Card 4G industrial router charging pile intelligent cabinet private network video monitoring 4G to Ethernet to WiFi wired network speed test software and hardware customization
- I like Takeshi Kitano's words very much: although it's hard, I will still choose that kind of hot life
- Basic operations of database and table ----- delete data table
- Redis守护进程无法停止解决方案
- 【网络攻防实训习题】
- Redis-列表
- Cadre du Paddle: aperçu du paddlelnp [bibliothèque de développement pour le traitement du langage naturel des rames volantes]
猜你喜欢
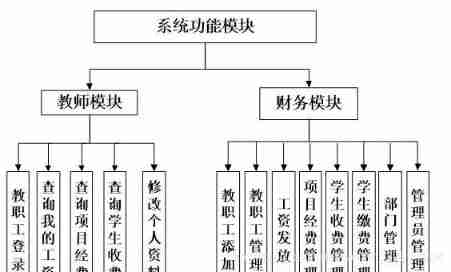
Computer graduation design PHP part-time recruitment management system for College Students
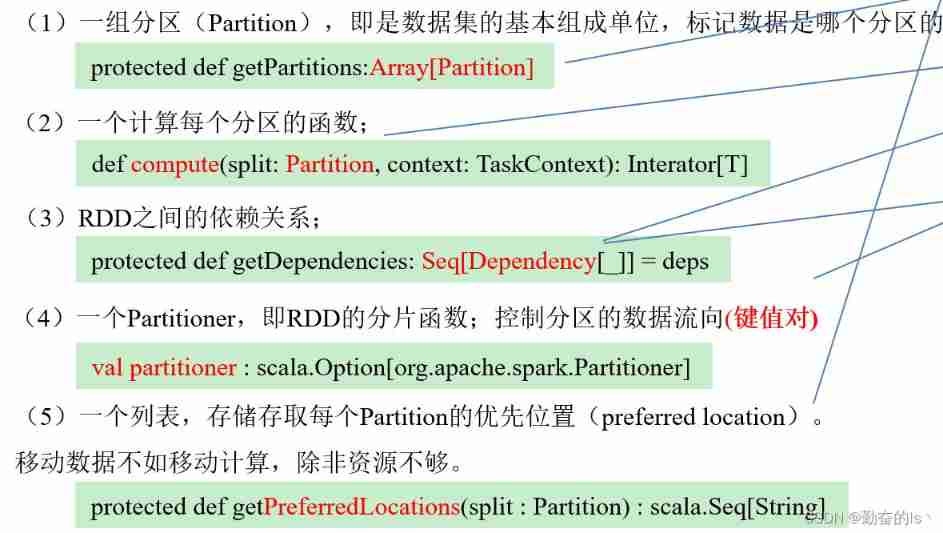
Overview of spark RDD
PHP campus financial management system for computer graduation design
Numpy array index slice

【Flask】官方教程(Tutorial)-part1:项目布局、应用程序设置、定义和访问数据库
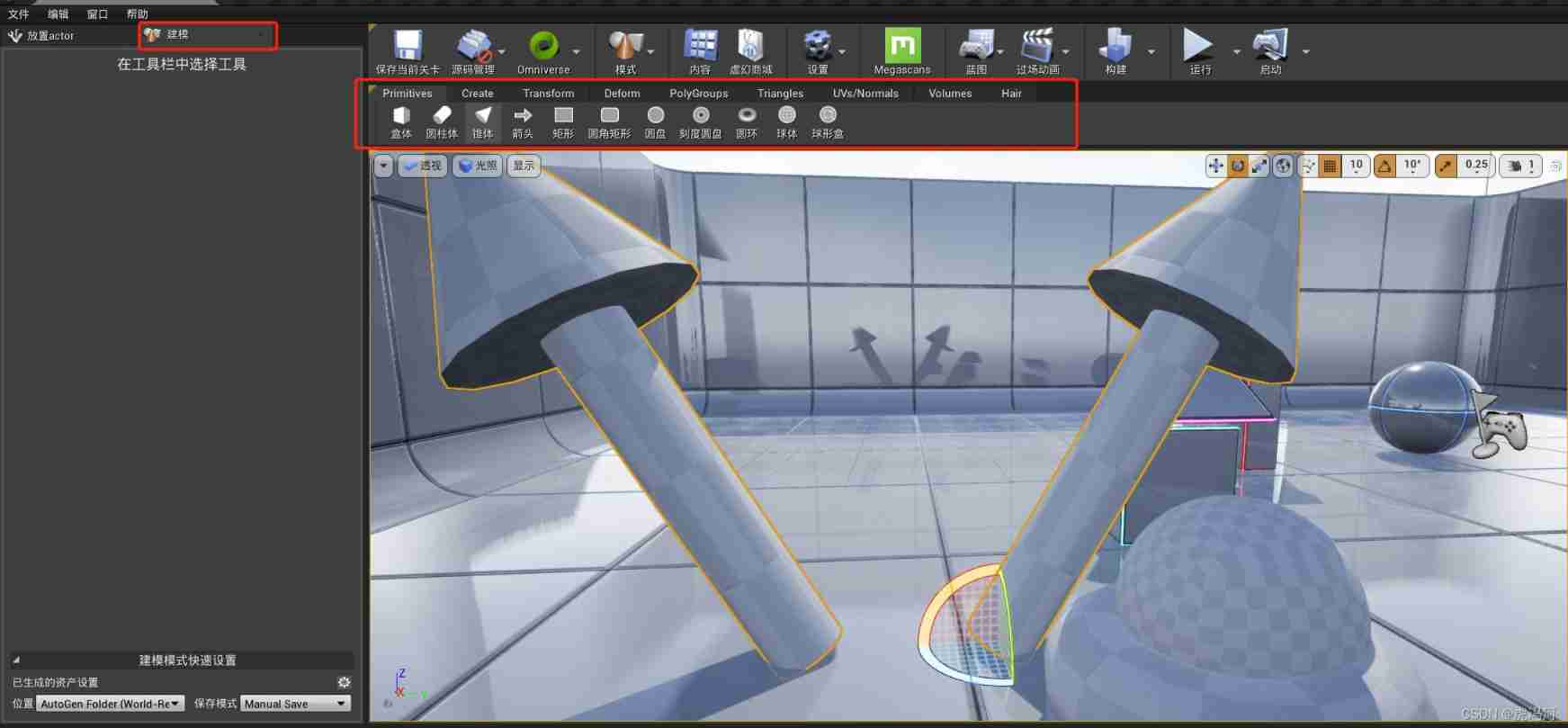
UE4 unreal engine, editor basic application, usage skills (IV)
You are using pip version 21.1.1; however, version 22.0.3 is available. You should consider upgradin
500 lines of code to understand the principle of mecached cache client driver

How to improve the level of pinduoduo store? Dianyingtong came to tell you

Basic operations of databases and tables ----- unique constraints
随机推荐
selenium 等待方式
Reasonable and sensible
Redis string type
leetcode-2. Palindrome judgment
Computer graduation design PHP part-time recruitment management system for College Students
Unreal browser plug-in
leetcode3、实现 strStr()
Executing two identical SQL statements in the same sqlsession will result in different total numbers
Redis守护进程无法停止解决方案
02.Go语言开发环境配置
TrueType字体文件提取关键信息
MySQL lethal serial question 1 -- are you familiar with MySQL transactions?
[flask] obtain request information, redirect and error handling
安装php-zbarcode扩展时报错,不知道有没有哪位大神帮我解决一下呀 php 环境用的7.3
Maya hollowed out modeling
A basic lintcode MySQL database problem
【clickhouse】ClickHouse Practice in EOI
How to set an alias inside a bash shell script so that is it visible from the outside?
[Clickhouse] Clickhouse based massive data interactive OLAP analysis scenario practice
Extracting key information from TrueType font files