当前位置:网站首页>GPIO port bit based on Cortex-M3 and M4 with operation macro definition (can be used for bus input and output, STM32, aducm4050, etc.)
GPIO port bit based on Cortex-M3 and M4 with operation macro definition (can be used for bus input and output, STM32, aducm4050, etc.)
2022-07-05 07:06:00 【Mike Zhou, exclusive musician of Netease】
be based on Cortex-M3、M4 Of GPIO Port with operation macro definition ( Bus input and output , Can be used for STM32、ADuCM4050 etc. )
STM32:
https://blog.csdn.net/weixin_53403301/article/details/121599951
ADuCM4050:
#ifndef __GPIO_H__
#define __GPIO_H__
#include "ADuCM4050.h"
#include "adi_gpio.h"
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
#define GPIO0_ODR_Addr (ADI_GPIO0_BASE+20) //0x40020014
#define GPIO0_IDR_Addr (ADI_GPIO0_BASE+16) //0x40020010
#define GPIO1_ODR_Addr (ADI_GPIO1_BASE+20) //0x40020054
#define GPIO1_IDR_Addr (ADI_GPIO1_BASE+16) //0x40020050
#define GPIO2_ODR_Addr (ADI_GPIO2_BASE+20) //0x40020094
#define GPIO2_IDR_Addr (ADI_GPIO2_BASE+16) //0x40020090
#define GPIO3_ODR_Addr (ADI_GPIO3_BASE+20) //0x400200D4
#define GPIO3_IDR_Addr (ADI_GPIO3_BASE+16) //0x400200D0
#define P0_O(n) BIT_ADDR(GPIO0_ODR_Addr,n) // Output
#define P0_I(n) BIT_ADDR(GPIO0_IDR_Addr,n) // Input
#define P1_O(n) BIT_ADDR(GPIO1_ODR_Addr,n) // Output
#define P1_I(n) BIT_ADDR(GPIO1_IDR_Addr,n) // Input
#define P2_O(n) BIT_ADDR(GPIO2_ODR_Addr,n) // Output
#define P2_I(n) BIT_ADDR(GPIO2_IDR_Addr,n) // Input
#define P3_O(n) BIT_ADDR(GPIO3_ODR_Addr,n) // Output
#define P3_I(n) BIT_ADDR(GPIO3_IDR_Addr,n) // Input
#define Port0 (ADI_GPIO_PORT0)
#define Port1 (ADI_GPIO_PORT1)
#define Port2 (ADI_GPIO_PORT2)
#define Port3 (ADI_GPIO_PORT3)
#define Pin0 (ADI_GPIO_PIN_0)
#define Pin1 (ADI_GPIO_PIN_1)
#define Pin2 (ADI_GPIO_PIN_2)
#define Pin3 (ADI_GPIO_PIN_3)
#define Pin4 (ADI_GPIO_PIN_4)
#define Pin5 (ADI_GPIO_PIN_5)
#define Pin6 (ADI_GPIO_PIN_6)
#define Pin7 (ADI_GPIO_PIN_7)
#define Pin8 (ADI_GPIO_PIN_8)
#define Pin9 (ADI_GPIO_PIN_9)
#define Pin10 (ADI_GPIO_PIN_10)
#define Pin11 (ADI_GPIO_PIN_11)
#define Pin12 (ADI_GPIO_PIN_12)
#define Pin13 (ADI_GPIO_PIN_13)
#define Pin14 (ADI_GPIO_PIN_14)
#define Pin15 (ADI_GPIO_PIN_15)
void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag);
void GPIO_BUS_OUT(unsigned int port,unsigned int num);
void P0_BUS_O(unsigned int num);
unsigned int P0_BUS_I(void);
void P1_BUS_O(unsigned int num);
unsigned int P1_BUS_I(void);
void P2_BUS_O(unsigned int num);
unsigned int P2_BUS_I(void);
void P3_BUS_O(unsigned int num);
unsigned int P3_BUS_I(void);
#endif
#include "ADuCM4050.h"
#include "adi_gpio.h"
#include "GPIO.h"
void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag)
{
switch(port)
{
case 0:{
switch(pin)
{
case 0:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));}else{
adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
case 1:{
switch(pin)
{
case 0:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));}else{
adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
case 2:{
switch(pin)
{
case 0:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));}else{
adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
case 3:{
switch(pin)
{
case 0:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));};break;
case 1:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));};break;
case 2:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));};break;
case 3:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));};break;
case 4:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));};break;
case 5:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));};break;
case 6:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));};break;
case 7:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));};break;
case 8:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));};break;
case 9:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));};break;
case 10:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));};break;
case 11:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));};break;
case 12:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));};break;
case 13:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));};break;
case 14:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));};break;
case 15:if(flag==1){
adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));}else{
adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));};break;
default:pin=0;break;
}
}break;
default:port=0;break;
}
}
void GPIO_BUS_OUT(unsigned int port,unsigned int num) //num The maximum is 0xffff
{
int i;
for(i=0;i<16;i++)
{
GPIO_OUT(port,i,(num>>i)&0x0001);
}
}
void P0_BUS_O(unsigned int num) // The input values num The maximum is 0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P0_O(i)=(num>>i)&0x0001;
}
}
unsigned int P0_BUS_I(void) // Output value num The maximum is 0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P0_I(i)<<i)&0xFFFF;
}
return num;
}
void P1_BUS_O(unsigned int num) // The input values num The maximum is 0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P1_O(i)=(num>>i)&0x0001;
}
}
unsigned int P1_BUS_I(void) // Output value num The maximum is 0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P1_I(i)<<i)&0xFFFF;
}
return num;
}
void P2_BUS_O(unsigned int num) // The input values num The maximum is 0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P2_O(i)=(num>>i)&0x0001;
}
}
unsigned int P2_BUS_I(void) // Output value num The maximum is 0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P2_I(i)<<i)&0xFFFF;
}
return num;
}
void P3_BUS_O(unsigned int num) // The input values num The maximum is 0xFFFF
{
int i;
for(i=0;i<16;i++)
{
P3_O(i)=(num>>i)&0x0001;
}
}
unsigned int P3_BUS_I(void) // Output value num The maximum is 0xFFFF
{
unsigned int num;
int i;
for(i=0;i<16;i++)
{
num=num+(P3_I(i)<<i)&0xFFFF;
}
return num;
}
边栏推荐
猜你喜欢
Get class files and attributes by reflection
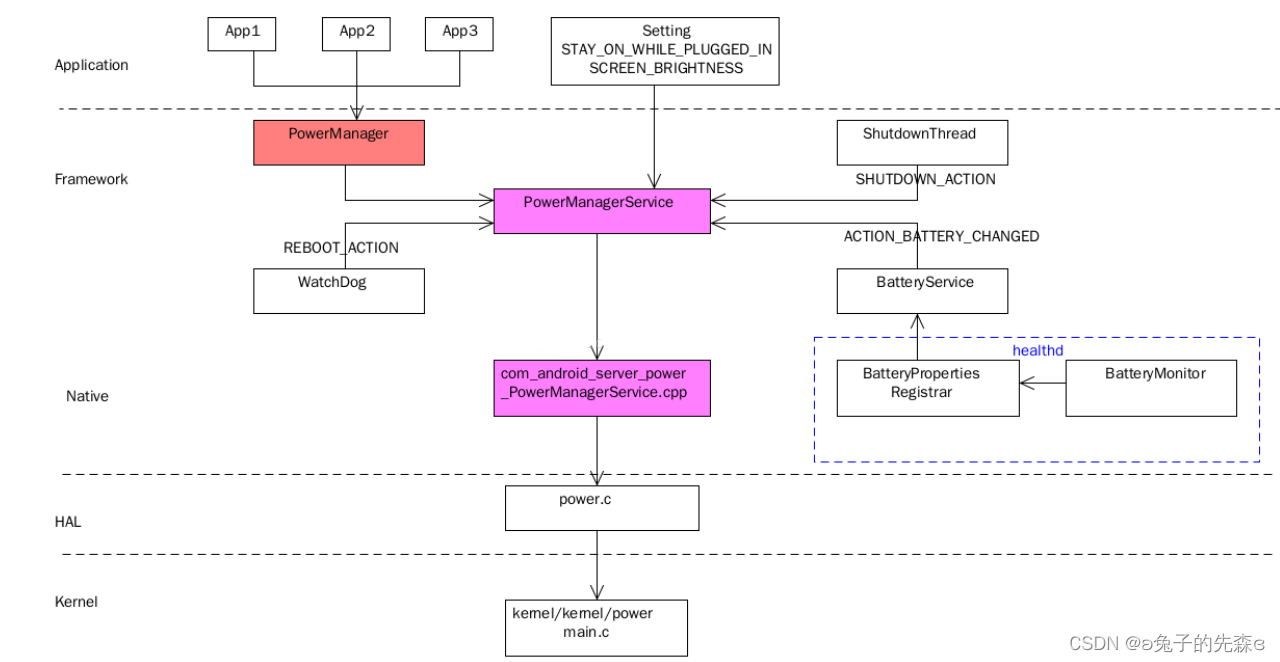
PowerManagerService(一)— 初始化
Pycahrm reports an error: indentation error: unindent does not match any outer indentation

Use ffmpeg to rotate, flip up and down, and flip horizontally

Volcano resource reservation feature
Build a microservice cluster environment locally and learn to deploy automatically

SD_CMD_RECEIVE_SHIFT_REGISTER
Ros2 - install ros2 (III)
C语言数组专题训练
SOC_SD_DATA_FSM
随机推荐
SOC_SD_DATA_FSM
Instruction execution time
Netease to B, soft outside, hard in
Ros2 - Service Service (IX)
[OBS] x264 Code: "buffer_size“
namespace
Rehabilitation type force deduction brush question notes D3
Ros2 - ros2 vs. ros1 (II)
睿智的目标检测59——Pytorch Focal loss详解与在YoloV4当中的实现
Ros2 - configuration development environment (V)
Pycahrm reports an error: indentation error: unindent does not match any outer indentation
Huawei bracelet, how to add medicine reminder?
[untitled]
*P++, (*p) + +, * (p++) differences
Unity ugui how to match and transform coordinates between different UI panels or uis
Matlab在线性代数中的应用(四):相似矩阵及二次型
Ros2 - workspace (V)
并发编程 — 死锁排查及处理
Database mysql all
cgroup_ memcg