当前位置:网站首页>最近公共祖先LCA的三种求法
最近公共祖先LCA的三种求法
2022-07-02 09:54:00 【litian355】
最近公共祖先的定义:如果结点c满足:
目录
3.用离线的tarjan算法求LCA 时间复杂度O(n+m)
1.c是a和b的公共祖宗结点。
2.c是距离a,b最近的公共祖宗节点。
那么就称c是a和b的最近公共祖先。
1.向上标记法
分别从a,标记所有a的祖宗节点,再让b向上跳,第一次遇到标记的结点就是最近公共祖先。
n个结点时间复杂度 O(n*n)
2.倍增算法
step1:预处理所有点从上走2的k次幂的父亲是谁,fa[i][j] 表示从i开始向上走2的j次幂能走到的节点其中
0<=j<=log2(n)
同时预处理每个节点的深度depth[i].
step2:求x,y的最近公共祖先:
1.假设x的深度比y大,也即x在y的下面,先让x倍增跳到与y同一深度(枚举2的整数次幂)
2.让两个点同时往上跳,一直跳到最近公共祖先的下一层,答案就是 fa[a][0]或者fa[b][0];
时间复杂度O(n*logn);
3.用离线的tarjan算法求LCA 时间复杂度O(n+m)
1.利用深度优先遍历将图分为三类同时用并查集得出每个已经遍历过点的代表元:
0.没有访问的点
1.正在搜索的点
2.已经遍历的点
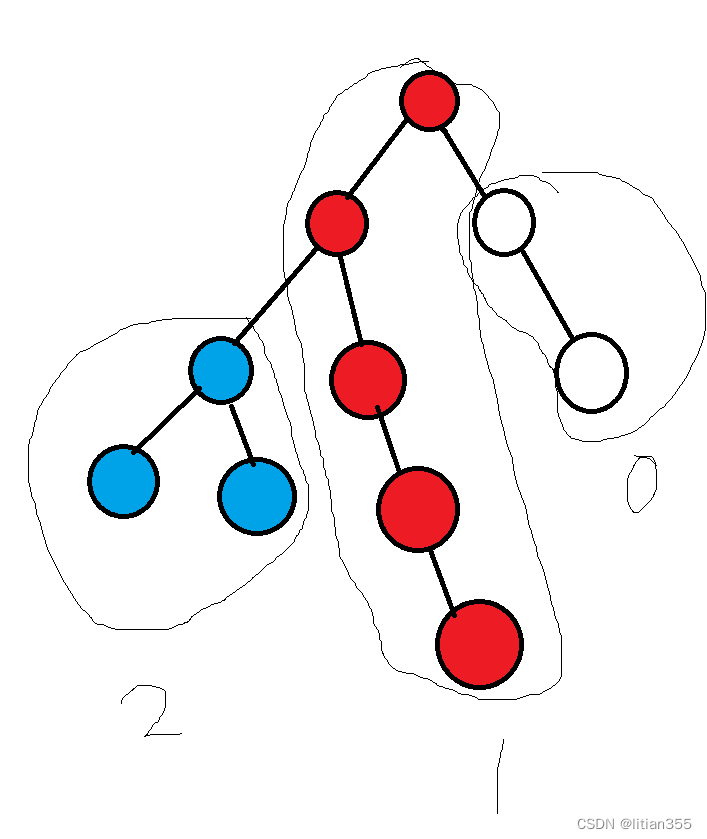
2.所有与正在搜索点集有关联的的已经遍历过点的最近公共祖先就是这个点的代表元。
注意点:因为是离线算法需要存储每次询问和每次询问的答案。
1172. 祖孙询问
给定一棵包含 n 个节点的有根无向树,节点编号互不相同,但不一定是1∼n。
有 m 个询问,每个询问给出了一对节点的编号 x 和 y,询问 x 与 y 的祖孙关系。
输入格式
输入第一行包括一个整数 表示节点个数;
接下来 n 行每行一对整数 a 和 b,表示 a 和 b 之间有一条无向边。如果 b 是 −1,那么 a 就是树的根;
第 n+2 行是一个整数 m 表示询问个数;
接下来 m 行,每行两个不同的正整数 x 和 y,表示一个询问。
输出格式
对于每一个询问,若 x 是 y 的祖先则输出 1,若 y 是 x 的祖先则输出 2,否则输出 0。
数据范围
1≤n<=4e4,
1≤每个节点的编号≤4e4
输入样例:
10
234 -1
12 234
13 234
14 234
15 234
16 234
17 234
18 234
19 234
233 19
5
234 233
233 12
233 13
233 15
233 19
输出样例:
1
0
0
0
2裸的LCA,倍增算法。
code:
//利用倍增算法求最近公共祖先
//1.让结点a、b的深度相同
//2.让节点a、b跳到LCA的下一层。
#include<bits/stdc++.h>
using namespace std;
int n,m;
int root;
const int N=4e4+10,M=N*2;
int h[N],e[M],ne[M],idx;
int fa[N][16];
int depth[N];
void add(int a,int b){
e[idx]=b,ne[idx]=h[a],h[a]=idx++;
}
int q[N];
void bfs(){
int hh=0,tt=0;
memset(depth,0x3f,sizeof depth);
q[0]=root;
depth[0]=0;
depth[root]=1;
while(hh<=tt){
int t=q[hh++];
for(int i=h[t];~i;i=ne[i]){
int j=e[i];
if(depth[j]>depth[t]+1){
depth[j]=depth[t]+1;
q[++tt]=j;
fa[j][0]=t;
for(int k=1;k<=15;k++){
fa[j][k]=fa[fa[j][k-1]][k-1];
}
}
}
}
}
int lca(int a,int b){
if(depth[a]<depth[b]) swap(a,b);
for(int i=15;i>=0;i--){
if(depth[fa[a][i]]>=depth[b]){
a=fa[a][i];
}
}
if(a==b) return a;
for(int i=15;i>=0;i--){
if(depth[fa[a][i]]!=depth[fa[b][i]])
{
a=fa[a][i];
b=fa[b][i];
}
}
return fa[a][0];
}
signed main(){
cin>>n;
memset(h,-1,sizeof h);
for(int i=1;i<=n;i++){
int a,b;
cin>>a>>b;
if(b==-1) root=a;
else add(a,b),add(b,a);
}
bfs();
cin>>m;
while(m--){
int a,b;
cin>>a>>b;
int p=lca(a,b);
if(p==a) cout<<1<<endl;
else if(p==b) cout<<2<<endl;
else cout<<0<<endl;
}
return 0;
}1171. 距离
给出 n 个点的一棵树,多次询问两点之间的最短距离。
注意:
- 边是无向的。
- 所有节点的编号是 1,2,…,n
输入格式
第一行为两个整数 n和 m。n表示点数,m 表示询问次数;
下来 n−1 行,每行三个整数x,y,k,表示点 x 和点 y 之间存在一条边长度为 k;
再接下来 m 行,每行两个整数x,y,表示询问点 x 到点 y 的最短距离。
树中结点编号从 1 到 n。
输出格式
共 m 行,对于每次询问,输出一行询问结果。
数据范围
2≤n≤1e4
1≤m≤2×1e4
0<k≤100
1≤x,y≤n
输入样例1:
2 2
1 2 100
1 2
2 1
输出样例1:
100
100
输入样例2:
3 2
1 2 10
3 1 15
1 2
3 2
输出样例2:
10
25
思路,对于树上的两个结点x,y间的距离我们可以用公式 dist[x],dist[y] ,dist[lca(x,y)] ,分别表示 x,y,以及x和y的最近公共祖先到根节点的距离。
那么distance=dist[x]+dist[y]-2*dist[lca(x,y)];
code:
//树的tarjan算法离线求LCA
//1.求出树中各点到根节点的距离
//2.用tarjan算法将途中点分类,更新与u有关的节点的LCA更新dist
//
//
#include<bits/stdc++.h>
using namespace std;
typedef pair<int, int> PII;
const int N = 10010, M = N * 2;
int n, m;
int h[N], e[M], w[M], ne[M], idx;
int dist[N];
int p[N];
int res[M];
int st[N];
vector<PII> query[N]; // first存查询的另外一个点,second存查询编号
void add(int a, int b, int c)
{
e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx ++ ;
}
void dfs(int u, int fa)
{
for (int i = h[u]; ~i; i = ne[i])
{
int j = e[i];
if (j == fa) continue;
dist[j] = dist[u] + w[i];
dfs(j, u);
}
}
int find(int x)
{
if (p[x] != x) p[x] = find(p[x]);
return p[x];
}
void tarjan(int u)
{
st[u] = 1;
for (int i = h[u]; ~i; i = ne[i])
{
int j = e[i];
if (!st[j])
{
tarjan(j);
p[j] = u;
}
}
for (auto item : query[u])
{
int y = item.first, id = item.second;
if (st[y] == 2)
{
int anc = find(y);
res[id] = dist[u] + dist[y] - dist[anc] * 2;
}
}
st[u] = 2;
}
int main()
{
scanf("%d%d", &n, &m);
memset(h, -1, sizeof h);
for (int i = 0; i < n - 1; i ++ )
{
int a, b, c;
scanf("%d%d%d", &a, &b, &c);
add(a, b, c), add(b, a, c);
}
for (int i = 0; i < m; i ++ )
{
int a, b;
scanf("%d%d", &a, &b);
if (a != b)
{
query[a].push_back({b, i});
query[b].push_back({a, i});
}
}
for (int i = 1; i <= n; i ++ ) p[i] = i;
dfs(1, -1);
tarjan(1);
for (int i = 0; i < m; i ++ ) printf("%d\n", res[i]);
return 0;
}
边栏推荐
- Counter attack of flour dregs: MySQL 66 questions, 20000 words + 50 pictures in detail! A little six
- Day4 operator, self increasing, self decreasing, logical operator, bit operation, binary conversion decimal, ternary operator, package mechanism, document comment
- Ali on three sides, it's really difficult to successfully get the offer rated P7
- [opencv learning] [moving object detection]
- [opencv learning] [contour detection]
- 3 a VTT terminal regulator ncp51200mntxg data
- bellman-ford AcWing 853. Shortest path with side limit
- js5day(事件监听,函数赋值给变量,回调函数,环境对象this,全选反选案例,tab栏案例)
- 中文姓名提取(玩具代码——准头太小,权当玩闹)
- 【蓝桥杯选拔赛真题43】Scratch航天飞行 少儿编程scratch蓝桥杯选拔赛真题讲解
猜你喜欢

Unity skframework framework (XIX), POI points of interest / information points

js4day(DOM开始:获取DOM元素内容,修改元素样式,修改表单元素属性,setInterval定时器,轮播图案例)
![Jerry's watch modifies the alarm clock [chapter]](/img/d6/04fb8143027578bb707529a05db548.jpg)
Jerry's watch modifies the alarm clock [chapter]
Variable, "+" sign, data type

Interval DP acwing 282 Stone merging

Everyone wants to eat a broken buffet. It's almost cold
Unity SKFramework框架(二十一)、Texture Filter 贴图资源筛选工具
Linear DP acwing 896 Longest ascending subsequence II
West digital decided to raise the price of flash memory products immediately after the factory was polluted by materials
Unity skframework framework (XVI), package manager development kit Manager
随机推荐
Obtain file copyright information
js3day(数组操作,js冒泡排序,函数,调试窗口,作用域及作用域链,匿名函数,对象,Math对象)
Five best software architecture patterns that architects must understand
Interesting interview questions
Js6day (search, add and delete DOM nodes. Instantiation time, timestamp, timestamp cases, redrawing and reflow)
Do you know all the interface test interview questions?
VIM super practical guide collection of this one is enough
net share
spfa AcWing 851. SPFA finding the shortest path
[error record] cannot open "XXX" because Apple cannot check whether it contains malware
Linear DP acwing 897 Longest common subsequence
Japan bet on national luck: Web3.0, anyway, is not the first time to fail!
嵌入式软件开发
Mobile layout (flow layout)
【云原生数据库】遇到慢SQL该怎么办(上)?
Crowncad (crown CAD), the first fully independent 3D CAD platform based on Cloud Architecture in China
Unity skframework framework (XV), singleton singleton
无向图的桥
Apply lnk306gn-tl converter, non isolated power supply
Jerry's watch modifies the alarm clock [chapter]