当前位置:网站首页>Schnuka: working principle of robot visual grasping machine visual grasping
Schnuka: working principle of robot visual grasping machine visual grasping
2022-07-07 10:32:00 【Schnuka machine vision】
Schnuka : The final assembly workshop automatically sorts materials , Automatic sorting of factory materials
Robot vision hardware mainly includes image acquisition and visual processing , The image is acquired by the lighting system 、 Visual sensors 、 simulation - It is composed of digital converter and frame memory . Robot vision obtains two-dimensional images of the environment through visual sensors , And through the visual processor for analysis and interpretation , And then converted to symbols , Let robots recognize objects , And determine its location .
边栏推荐
猜你喜欢




随机推荐
【二开】【JeecgBoot】修改分页参数
Common shortcut keys in IDA
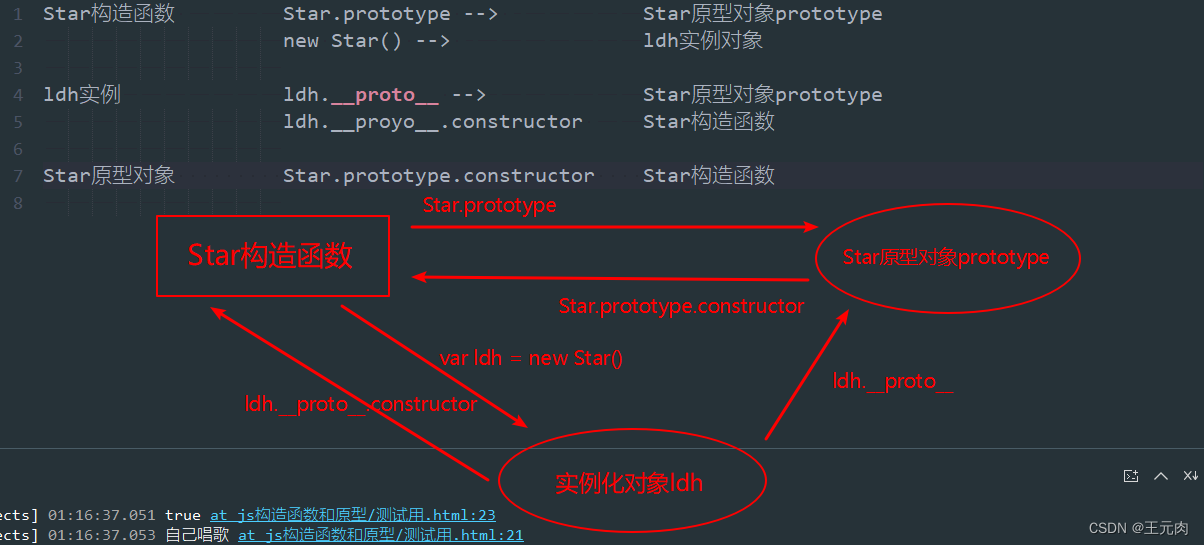
Prototype and prototype chain
Leetcode exercise - 113 Path sum II
串口通讯继电器-modbus通信上位机调试软件工具项目开发案例
Deeply analyze the main contents of erc-4907 agreement and think about the significance of this agreement to NFT market liquidity!
Serial communication relay Modbus communication host computer debugging software tool project development case
PDF文档签名指南
P1031 [NOIP2002 提高组] 均分纸牌
[sword finger offer] 42 Stack push in and pop-up sequence
Sword finger offer 38 Arrangement of strings [no description written]
BigDecimal value comparison
5个chrome简单实用的日常开发功能详解,赶快解锁让你提升更多效率!
[daiy5] jz77 print binary tree in zigzag order
JMeter installation
Guide de signature du Code Appx
移动端通过设置rem使页面内容及字体大小自动调整
Study summary of postgraduate entrance examination in July
Appx code signing Guide
求方程ax^2+bx+c=0的根(C语言)