当前位置:网站首页>Robomaster visual tutorial (0) Introduction
Robomaster visual tutorial (0) Introduction
2022-07-07 23:54:00 【Raring_ Ringtail】
background
Senior graduated , Thinking about the four years of college, I also need to summarize . From RoboMaster Let's write this competition . I was a sophomore in the competition , Do the visual recognition part . The idea was simple , Because I like Linux I didn't want to adjust the electric control of the welding board, so I participated in the visual part ( Although ultimately responsible for a large part of the electronic control ...). Doing vision can use clever calculations and develop some very interesting things , Learn a lot of cutting-edge knowledge .
When I was a sophomore, I really started from scratch . Although the team had graduate students doing vision , But there is no technology inheritance , There is no one to ask questions . Although there are nominally three people in the inspection group , A graduate student, a junior, and me , But they all ran away . So I can understand some new contacts RM The confusion in the heart of visual people . This year, after I finished my postgraduate entrance examination, I went to help this class do a visual , Found a lot of problems , Many of the pits we have stepped on before are still stepping on , So it is still a state of doing things in their own way, delaying the final rush every day .
I intend to RoboMaster The technical essentials of all aspects of vision are written into a series of tutorials , Help novices get started , Also hope to have some reference value for other teams . The code mainly refers to Southeast University SuperNova Open source code of the team ( Portal :GitHub), Their code is excellent , Built a good project framework . I admire their courage to share such good code .
Recently applied for a wechat official account , Name is Notes on Jiangda . As an engineering man, it's a headache to name , With reference to Yeon meow's Netease cloud music radio, Yeon meow remembers a Jiangda diary , It is convenient for me to help others by summarizing my own learning and research experience . Interested friends can pay attention to .
This series of tutorials will be constantly updated .
RoboMaster Visual tutorial directory
1. camera
- Camera parameters
Roller shutter exposure and global exposure
Exposure
Gamma correct
Frame rate and camera selection - The lens
- Filter
- Linux Camera drive
Camera debugging tool
Use RMVideoCapture Class calls the camera
Use OpenCV Of VideoCapture To call the camera
2. A clever plan (Nvidia Tegra K1) The system configuration
- overview
- Wonderful calculation data link summary
- Smart computing system reset / clone / recovery
- Miaoshu what to do after installing the system
Miaozao connects directly to the computer through the network cable and shares the computer network
Smart remote debugging
Wonderful installation FTP
Smart computing configuration software source
The title bar of smart computing system jumps one by one, and the solution
Wonderful installation OpenCV / CUDA
Wonderful installation GCC5
Wonderful calculation installation configuration Qt Creator
3. Visual recognition program framework
- overview
- Multithreading
- Besides multithreading , You can also use multiple processes
- Next, take the open source program of Southeast University as an example to talk about their overall architecture
Let's get to the point
Project profile overview
ImgProdCons class
The main function
Wrap the algorithm with classes
4. Armor plate recognition algorithm
- overview
Here are some information links , Classics ! - Armor plate identification
- test_infantry.cpp
- Analyze the armor plate
- Identification function int ArmorDetector::detect()
5. Target location solution ( Get corners through pixels )
- overview
- The defect of using pixel coordinates directly
- Camera calibration
- Get the required corner according to the principle of small hole imaging
- Angle measurement verification
6. Target location solution (PnP Solve the relative position between the target and the camera )
- overview
- Algorithm principle
- solvePnP Use process of
- experiment : Measure the position of the QR code relative to the camera
- RoboMaster Position solution in visual program
- Expand
7. Windmill big symbol recognition
- Share some information links
8. A serial port communication
- overview
- DJI Open source code serial port
- Southeast University open source code serial port part
- Qt Write serial port assistant
- A little digression
9. Windmill big symbol recognition 2
- Image preprocessing
- Armor plate contour recognition
- Identify the armor plate to hit
- Windmill positioning
10. Target forecast
- Why should we make target prediction
- Several situations and analysis of prediction problems
- How to make predictions
11. summary
I applied for my own official account Notes on Jiangda , It is convenient for me to help others by summarizing my own learning and research experience . Interested friends can pay attention to .
边栏推荐
- Database interview questions + analysis
- Preliminary test of optical flow sensor: gl9306
- [summary] some panels and videos seen
- One click free translation of more than 300 pages of PDF documents
- aws-aws help报错
- 数据湖(十五):Spark与Iceberg整合写操作
- 自动化测试:Robot FrameWork框架90%的人都想知道的实用技巧
- Alibaba cloud MySQL cannot connect
- mysql8.0 ubuntu20.4
- 在网页中打开展示pdf文件
猜你喜欢
Preliminary test of optical flow sensor: gl9306
Kubectl 好用的命令行工具:oh-my-zsh 技巧和窍门
Laser slam learning (2d/3d, partial practice)
QT creator add JSON based Wizard
Chisel tutorial - 05 Sequential logic in chisel (including explicit multi clock, explicit synchronous reset and explicit asynchronous reset)

FFA and ICGA angiography
![Arbre binaire équilibré [Arbre AVL] - Insérer et supprimer](/img/1f/cd38b7c6f00f2b3e85d4560181a9d2.png)
Arbre binaire équilibré [Arbre AVL] - Insérer et supprimer
Restricted linear table
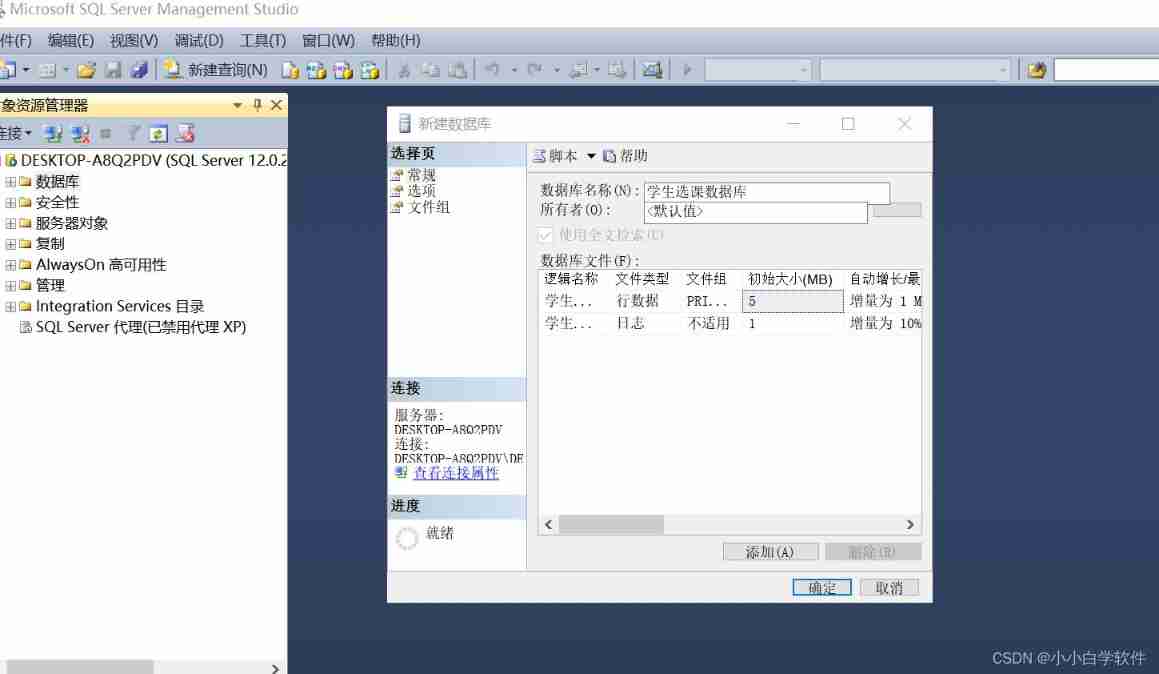
Basic learning of SQL Server -- creating databases and tables with the mouse
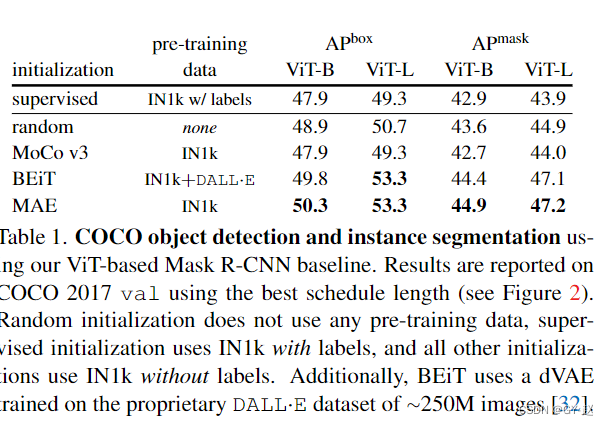
Benchmarking Detection Transfer Learning with Vision Transformers(2021-11)
随机推荐
Data analysis series 3 σ Rule / eliminate outliers according to laida criterion
Apng2gif solutions to various problems
如何衡量产品是否“刚需、高频、痛点”
archery安装测试
One click free translation of more than 300 pages of PDF documents
数据湖(十五):Spark与Iceberg整合写操作
One of the anti climbing methods
Archery installation test
Benchmarking Detection Transfer Learning with Vision Transformers(2021-11)
Traduction gratuite en un clic de plus de 300 pages de documents PDF
C - minute number V3
redis缓存工具类,值得拥有~
一鍵免費翻譯300多頁的pdf文檔
【leetcode】day1
P5594 [xr-4] simulation match
Solutions to problems in sqlserver deleting data in tables
自动化测试:Robot FrameWork框架90%的人都想知道的实用技巧
Postgres timestamp to human eye time string or millisecond value
在网页中打开展示pdf文件
[summary] some panels and videos seen