当前位置:网站首页>The 6th Blue Bridge Cup single chip microcomputer provincial competition
The 6th Blue Bridge Cup single chip microcomputer provincial competition
2022-07-02 03:38:00 【Super 561】
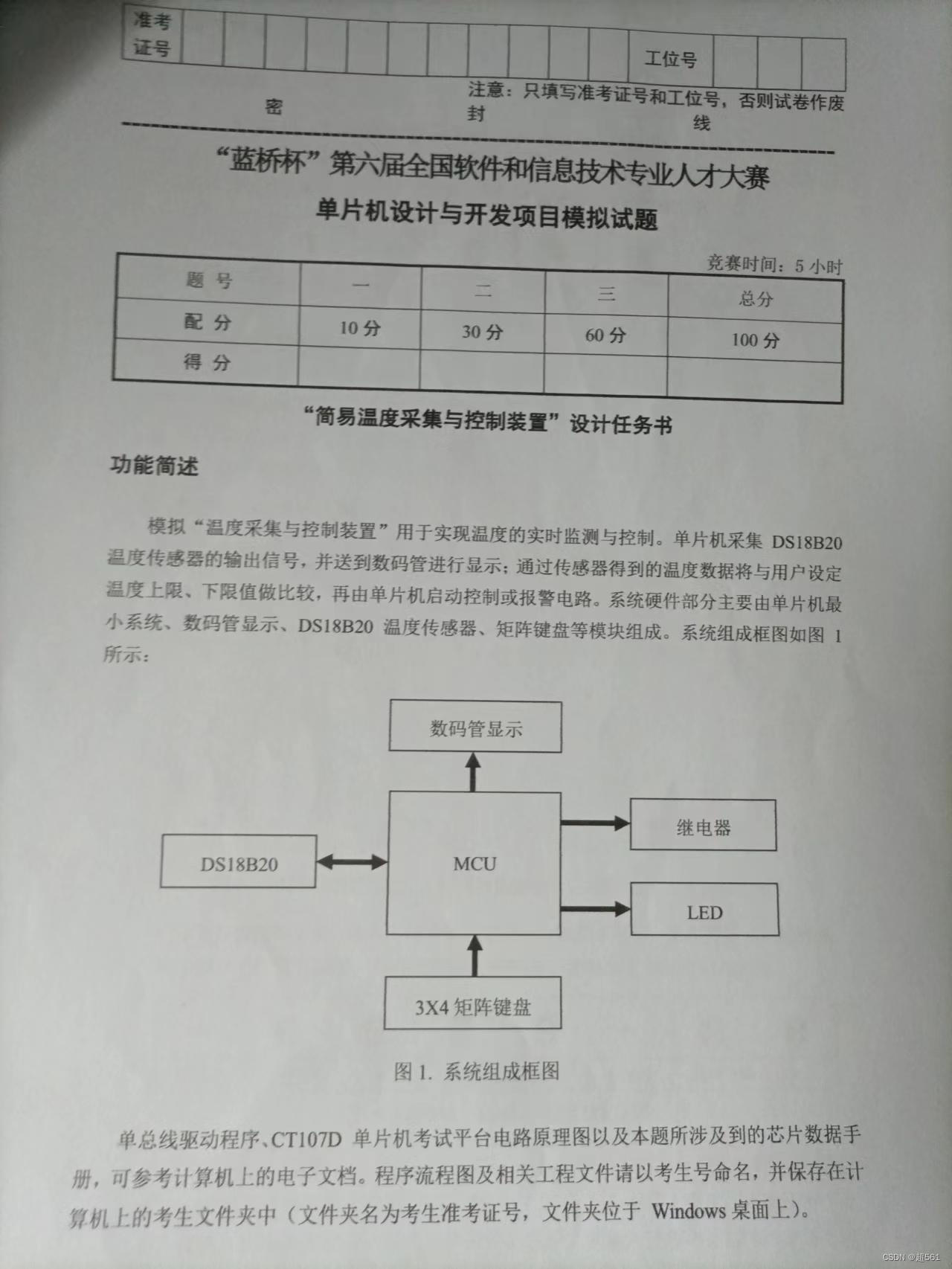

difficulty How to set the upper and lower temperature limits by pressing the key ; Define an array to display the temperature , Determine the upper and lower limits of the display temperature by the number of key presses ; Define an array to store the value of temperature , Use the number of key presses to determine whether the temperature is ten digits or one digit
main.c
#include <STC15F2K60S2.H>
#include <ONEWIRE.H>
unsigned int wendu;
unsigned char qujian;
unsigned char keynumber;
unsigned char display_mode;
unsigned char Tmax=30;
unsigned char Tmin=20;
unsigned char key_press;
unsigned char led_flag=1;
#define NO_KEY 0xff
#define KEY_STATE0 0
#define KEY_STATE1 1
#define KEY_STATE2 2
unsigned char smgdisplay[8];
unsigned char wd[8];
unsigned char smg_du[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
void Device_ctrl(unsigned char p2date,unsigned char p0date);
unsigned char key_scan()
{
static unsigned char key_state=KEY_STATE0;
unsigned char key_value=0,key_temp;
unsigned char key1,key2;
P30=0;P31=0;P32=0;P33=0;P34=1;P35=1;P42=1;P44=1;
if(P44==0){key1=0x70;}
if(P42==0){key1=0xb0;}
if(P35==0){key1=0xd0;}
if(P34==0){key1=0xe0;}
if((P44==1)&&(P42==1)&&(P35==1)&&(P34==1)){key1=0xf0;}
P30=1;P31=1;P32=1;P33=1;P34=0;P35=0;P42=0;P44=0;
if(P30==0){key2=0x0e;}
if(P31==0){key2=0x0d;}
if(P32==0){key2=0x0b;}
if(P33==0){key2=0x07;}
if((P30==1)&&(P31==1)&&(P32==1)&&(P33==1)){key2=0x0f;}
key_temp=key1|key2;
switch(key_state)
{
case KEY_STATE0: if(key_temp!=NO_KEY)
{
key_state=KEY_STATE1;
}
break;
case KEY_STATE1: if(key_temp==NO_KEY)
{key_state=KEY_STATE0;}
else
{
switch(key_temp)
{
case 0x77:key_value=4;break;
case 0x7b:key_value=5;break;
case 0x7d:key_value=6;break;
case 0x7e:key_value=7;break;
case 0xb7:key_value=8;break;
case 0xbb:key_value=9;break;
case 0xbd:key_value=10;break;
case 0xbe:key_value=11;break;
case 0xd7:key_value=12;break;
case 0xdb:key_value=13;break;
case 0xdd:key_value=14;break;
case 0xde:key_value=15;break;
case 0xe7:key_value=16;break;
case 0xeb:key_value=17;break;
case 0xed:key_value=18;break;
case 0xee:key_value=19;break;
}
key_state=KEY_STATE2;
}
break;
case KEY_STATE2:if(key_temp==NO_KEY)
{key_state=KEY_STATE0;}break;
}
return key_value;
}
unsigned int key_count;
void key_process()
{
unsigned int key_val;
if(key_count>=5)
{
key_count=0;
key_val=key_scan();
switch(key_val)
{
case 4:smgdisplay[key_press]=smg_du[9];wd[key_press]=9;key_press++;break;
case 5:smgdisplay[key_press]=smg_du[6];wd[key_press]=6;key_press++;break;
case 6:smgdisplay[key_press]=smg_du[3];wd[key_press]=3;key_press++;break;
case 7:smgdisplay[key_press]=smg_du[0];wd[key_press]=0;key_press++;break;
case 8:display_mode++;
if(display_mode==2)
{
display_mode=0;
key_press=0;
Tmax=wd[1]*10+wd[2];
Tmin=wd[6]*10+wd[7];
if(Tmax<Tmin)
{
P2=0X80;P0=~0X02;P2=0;
led_flag=0;
}
else
{
P2=0X80;P0=0Xff;P2=0;
led_flag=1;
}
}break;
case 9:smgdisplay[key_press]=smg_du[7];wd[key_press]=7;key_press++;break;
case 10:smgdisplay[key_press]=smg_du[4];wd[key_press]=4;key_press++;break;
case 11:smgdisplay[key_press]=smg_du[1];wd[key_press]=1;key_press++;break;
case 12:if(display_mode==1)
{
smgdisplay[1]=0x00;
smgdisplay[2]=0x00;
smgdisplay[6]=0x00;
smgdisplay[7]=0x00;
key_press=0;
}break;
case 13:smgdisplay[key_press]=smg_du[8];wd[key_press]=8;key_press++;break;
case 14:smgdisplay[key_press]=smg_du[5];wd[key_press]=5;key_press++;break;
case 15:smgdisplay[key_press]=smg_du[2];wd[key_press]=2;key_press++;break;
case 16:break;
case 17:break;
case 18:break;
case 19:break;
}
}
}
void Device_ctrl(unsigned char p2date,unsigned char p0date)
{
P0=p0date;
P2=P2&0X1F|p2date;
P2&=0X1F;
}
unsigned char smg_display[8];
unsigned int smg_count;
void smg_show()
{
unsigned int i;
Device_ctrl(0xc0,0);
if(display_mode==0)
{
Device_ctrl(0xe0,~smg_display[i]);
}
else
{
Device_ctrl(0xe0,~smgdisplay[i]);
}
Device_ctrl(0xc0,0x01<<i);
i=(i+1)%8;
}
void smg_process()
{
smgdisplay[0]=0x40;
smgdisplay[3]=0x00;
smgdisplay[4]=0x00;
smgdisplay[5]=0x40;
if(smg_count>3)
{
smg_count=0;
if(display_mode==0)
{
if(wendu<Tmin)
{
qujian=0;
}
if(Tmin<wendu<Tmax)
{
qujian=1;
}
if(wendu>Tmax)
{
qujian=2;
}
smg_display[0]=0x40;
smg_display[1]=smg_du[qujian];
smg_display[2]=0x40;
smg_display[3]=0x00;
smg_display[4]=0x00;
smg_display[5]=0x00;
smg_display[6]=smg_du[wendu/10];
smg_display[7]=smg_du[wendu%10];
}
else
{
if(key_press==3)
{
key_press=6;
}
if(key_press==8)
{
key_press=9;
}
}
}
}
unsigned int temp_count;
void temp_process()
{
if(temp_count>=100)
{
temp_count=0;
wendu=rd_temperature();
}
}
void work_process()
{
if(qujian==0)
{
P2=0xa0;P0=0x30;P2=0;
}
if(qujian==1)
{
P2=0xa0;P0=0x00;P2=0;
}
if(qujian==2)
{
P2=0xa0;P0=0x30;P2=0;
}
}
void Timer2Init() //1 millisecond @12.000MHz
{
AUXR &= 0xFB; // Timer clock 12T Pattern
T2L = 0x18; // Set initial value of timing
T2H = 0xFC; // Set initial value of timing
AUXR |= 0x10; // Timer 2 Start timing
IE2|=0X04;
EA=1;
}
unsigned int led_count;
bit ledflag;
void led_process()
{
if(qujian==0)
{
if(led_count>800)
{
led_count=0;
ledflag=~ledflag;
if(ledflag)
{
P2=0X80;P0=~0X01;P2=0;
}
else
{
P2=0X80;P0=0xFF;P2=0;
}
}
}
if(qujian==1)
{
if(led_count>400)
{
led_count=0;
ledflag=~ledflag;
if(ledflag)
{
P2=0X80;P0=~0X01;P2=0;
}
else
{
P2=0X80;P0=0xFF;P2=0;
}
}
}
if(qujian==2)
{
if(led_count>200)
{
led_count=0;
ledflag=~ledflag;
if(ledflag)
{
P2=0X80;P0=~0X01;P2=0;
}
else
{
P2=0X80;P0=0xFF;P2=0;
}
}
}
}
void main()
{
Timer2Init();
Device_ctrl(0xa0,0x00);
Device_ctrl(0x80,0xff);
while(1)
{
key_process();
smg_process();
temp_process();
work_process();
led_process();
}
}
void timer2service() interrupt 12
{
smg_count++;
smg_show();
key_count++;
temp_count++;
led_count++;
}onewire.c
#include "onewire.h"
// Single bus internal delay function
void Delay_OneWire(unsigned int t)
{
t=t*12;
while(t--);
}
// Single bus write operation
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
// Single bus read operation
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ= 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20 initialization
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
float rd_temperature(void)
{
float temp;
unsigned char low,high;
init_ds18b20();
Write_DS18B20(0XCC);
Write_DS18B20(0X44);
init_ds18b20();
Write_DS18B20(0XCC);
Write_DS18B20(0XBE);
low=Read_DS18B20();
high=Read_DS18B20();
temp=(high<<8)|low;
temp=temp*0.0625;
return temp;
}onewire.h
#ifndef __ONEWIRE_H
#define __ONEWIRE_H
#include <STC15F2K60S2.H>
sbit DQ = P1^4;
float rd_temperature(void);
#endif
边栏推荐
- Kotlin basic learning 14
- C#聯合halcon脫離halcon環境以及各種報錯解决經曆
- NLog use
- In depth analysis of C language - variable error prone knowledge points # dry goods inventory #
- Large screen visualization from bronze to the advanced king, you only need a "component reuse"!
- High performance and low power cortex-a53 core board | i.mx8m Mini
- Detailed explanation of ThreadLocal
- 蓝桥杯单片机省赛第十一届第二场
- Global and Chinese market of gynaecological health training manikin 2022-2028: Research Report on technology, participants, trends, market size and share
- 蓝桥杯单片机省赛第八届
猜你喜欢

Named block Verilog

Pycharm2021 delete the package warehouse list you added

蓝桥杯单片机省赛第十二届第一场

Review materials of project management PMP high frequency examination sites (8-1)
![[yolo3d]: real time detection of end-to-end 3D point cloud input](/img/5e/f17960d302f663db75ad82ae0fd70f.jpg)
[yolo3d]: real time detection of end-to-end 3D point cloud input
0基础如何学习自动化测试?按照这7步一步一步来学习就成功了
Fourier series

How to establish its own NFT market platform in 2022
蓝桥杯单片机省赛第十届
![[HCIA continuous update] working principle of OSPF Protocol](/img/bc/4eeb091c511fd563fb1e00c8c8881a.jpg)
[HCIA continuous update] working principle of OSPF Protocol
随机推荐
Load different fonts in QML
Xlwings drawing
[designmode] builder model
蓝桥杯单片机省赛第十一届第一场
MySQL advanced (Advanced) SQL statement (II)
MySQL index, transaction and storage engine
"Analysis of 43 cases of MATLAB neural network": Chapter 41 implementation of customized neural network -- personalized modeling and Simulation of neural network
蓝桥杯单片机第六届温度记录器
Global and Chinese markets for infant care equipment, 2022-2028: Research Report on technology, participants, trends, market size and share
Global and Chinese markets for electronic laryngoscope systems 2022-2028: Research Report on technology, participants, trends, market size and share
Kotlin basic learning 14
In depth analysis of C language - variable error prone knowledge points # dry goods inventory #
Oracle viewing locked tables and unlocking
PY3, PIP appears when installing the library, warning: ignoring invalid distribution -ip
On redis (II) -- cluster version
Unity脚本的基础语法(7)-成员变量和实例化
Spark Tuning
aaaaaaaaaaaaa
Oracle 查看被锁的表和解锁
Analyse de 43 cas de réseaux neuronaux MATLAB: Chapitre 42 opérations parallèles et réseaux neuronaux - - opérations parallèles de réseaux neuronaux basées sur CPU / GPU