当前位置:网站首页>Summary of research status of inertial navigation calibration at home and abroad (abridged version)
Summary of research status of inertial navigation calibration at home and abroad (abridged version)
2022-07-07 02:48:00 【Python Xiaobai (Xiaohei in the next stage)】
Content
For inertia theory , In fact, the foundation has been established since the emergence of Newton's laws of mechanics . The literature [3] The updating algorithm of strapdown inertial navigation is introduced in detail 、 Error characteristic analysis 、 Initial alignment, Kalman filter and other related technologies , It is a relatively comprehensive reference book . In fact, inertial navigation technology is directly related to the development of inertial navigation devices , The starting time of research on inertial devices in China is similar to that in foreign countries . There are many inertial navigation pioneers in China , Such as Mr. Lin Shie 、 Mr. Lu yuanjiu 、 Mr. gaobolong et al . Mr. Lin shie in 1958 year , Founded Beihang gyro Research Laboratory , Develop the first liquid floated gyroscope and dynamically tuned gyroscope in China ; Mr. gaobolong successfully developed laser gyro , Make China become Jimei 、 Germany is the third country after Germany to master the most critical technical level , And reached the international advanced level .
There are also many researches on the calibration of inertial sensors in China . Strapdown inertial unit (SIMU) Calibration is the premise of inertial navigation , The calibration results will have a direct impact on the accuracy of inertial navigation , The literature [5] The calibration method of gyro combination in strapdown inertial navigation system is studied , The proposed method reduces or eliminates the influence of the earth's rotation , It effectively solves the problem that the gyro calibration cannot be carried out accurately when the experimental conditions are insufficient . The literature [6] Through simulation algorithm , The influence of horizontal reference error and North reference error on Laser Strapdown inertial unit is studied (LSIMU) Influence of calibration accuracy , Then the feasibility and reliability of the calibration of the two axis position turntable are verified . With the upgrading of inertial navigation devices , Calibration methods and technologies are also constantly developing and improving , The literature [7] A linearized iterative algorithm for solving the nonlinear equations of gyro calibration is proposed , A more concise method of accelerometer calibration data processing is given , Finally, the simulation test is carried out . The literature [8-11] A series of short calibration time , Low calibration cost 、 Calibration method with high navigation accuracy . There are also a large number of scholars abroad who have done relevant research on the calibration of inertial navigation sensors . The literature [12] The calibration method using precision equipment is studied , At the same time, the position calibration without equipment and the Kalman filter calibration method are also carried out . The literature [13] Use the three-dimensional turntable to calibrate the gyro , And consider the correction of angle correlation between different sensors , The calibration reaches the accuracy of professional calibration tools , And minimize the angular correlation between sensors . The literature [14-16] All right MEMS The calibration of inertial devices is a useful exploration .
The calibration of inertial devices is over , It is equivalent to solving the device error , We know that in addition to device errors , The initial attitude error will also affect the navigation effect , therefore , For the determination of the initial attitude angle , Scholars at home and abroad are also constantly studying and exploring . The literature [17] The formula for calculating the attitude of the carrier using the acceleration of gravity and the rotation rate of the earth in static state is derived , And analyze the error , Come to a conclusion , In the installation IMU Pay attention to the installation position of gyroscope and accelerometer with good performance . The literature [18] The dynamic high-precision initial alignment technology is studied , A method of initial alignment by dead reckoning is proposed , Results show , When the distance between the starting point of loading and the point with known position is 6 km Left and right , The initial alignment heading angle can achieve angle classification accuracy . The literature [19] The initial alignment method is studied for the low-cost sensors that occupy one of the main markets of inertial navigation , A measurement strategy combining different types of inertial navigation aids is proposed , Through numerical simulation and field experiments, an adaptive Kalman filter is found to improve the alignment performance .
reference
Yan Gongmin , Weng Jun . Strapdown inertial navigation algorithm and integrated navigation principle . Northwestern Polytechnic University Press , 2019
Cheng Meng . be based on GPS/INS Loose integrated navigation UAV Research on Location Algorithm . Hebei University of Engineering ,2021
Yan Gongmin , Qin Yongyuan . Research on calibration method of gyro combination in strapdown inertial navigation unit . Journal of missile and guidance ,2005, The first 4 period :872-875
Yan Gongmin , Qin Yongyuan . The calibration simulation of double axis position turntable of Laser Strapdown inertial unit [J]. Chinese Journal of Inertial Technology ,2007(01):123-127.
Yan Gongmin , Zhaochunlian , Wu Feng . A laser gyro SIMU Improvement of the new calibration method [C]. //the 32nd Chinese Control Conference( The 32nd China Control Conference ) proceedings . 2013:4861-4865.
Wang Zihui , Chengxianghong , Fan shisec . Strapdown inertial navigation system based on two axis turntable 8 Position system level calibration method ( english )[J]. Chinese Journal of Inertial Technology , 2019, The first 27 volume (1):23-31.
Cheng Junchao , The house is completed , Wuweiren et al . A hybrid calibration method of laser gyro inertial measurement unit [J]. Chinese Journal of Inertial Technology , 2014, (4):445-452.
Wang sui'er 1, Yang Gongliu 1, Wang Lifen 2 etc. . A kind of IMU Fast calibration method of full zero bias [J]. Chinese Journal of Inertial Technology , 2020, The first 28 volume (3):316-322.
Jian wang , Liang Jian , Han Houzeng . Low cost IMU Multi position rotation field calibration method [J]. Chinese Journal of Inertial Technology , 2017, The first 25 volume (3):294-298.
Poddar, S., Kumar, V., and Kumar, A. (September 26, 2016). “A Comprehensive Overview of Inertial Sensor Calibration Techniques.” ASME. J. Dyn. Sys., Meas., Control. January 2017; 139(1): 011006. https://doi.org/10.1115/1.4034419
R. Zhang, F. Hoflinger and L. M. Reind, “Calibration of an IMU Using 3-D Rotation Platform,” in IEEE Sensors Journal, vol. 14, no. 6, pp. 1778-1787, June 2014, doi: 10.1109/JSEN.2014.2303642.
Md. Riaz Pervez, Hafiz Ahamed, Md. Manirul Islam, Christof Hille, and Hubert Roth
, “Evaluation and calibration of an inertial measurement unit”, AIP Conference Proceedings 2121, 040002 (2019) https://doi.org/10.1063/1.5115873
M. V. Gheorghe, “Advanced calibration method for 3-axis MEMS accelerometers,” 2016 International Semiconductor Conference (CAS), 2016, pp. 81-84, doi: 10.1109/SMICND.2016.7783046.
T. Dar, K. Suryanarayanan and A. Geisberger, “No Physical Stimulus Testing and Calibration for MEMS Accelerometer,” in Journal of Microelectromechanical Systems, vol. 23, no. 4, pp. 811-818, Aug. 2014, doi: 10.1109/JMEMS.2013.2294562.
Yan Gongmin , Qin Yongyuan . Research on two position alignment of vehicle Laser Strapdown Inertial Navigation System [J]. Journal of missile and guidance ,2005(S8):478-480+494.
Yan Gongmin , Qin Yongyuan , Majianping . Dynamic high-precision initial alignment technology of vehicle navigation system [J]. Systems engineering and electronics ,2006(09):1404-1407.
I. Klein and Y. Bar-Shalom, “INS Fine Alignment With Low-Cost Gyroscopes: Adaptive Filters for Different Measurement Types,” in IEEE Access, vol. 9, pp. 79021-79032, 2021, doi: 10.1109/ACCESS.2021.3079381.
Y. Huang, Y. Zhang and X. Wang, “Kalman-Filtering-Based In-Motion Coarse Alignment for Odometer-Aided SINS,” in IEEE Transactions on Instrumentation and Measurement, vol. 66, no. 12, pp. 3364-3377, Dec. 2017, doi: 10.1109/TIM.2017.2737840.
边栏推荐
- Qpushbutton- "function refinement"
- CDB PDB user rights management
- CDB PDB 用户权限管理
- Draco - gltf model compression tool
- Metaforce force meta universe fossage 2.0 smart contract system development (source code deployment)
- Redis入门完整教程:AOF持久化
- LeetCode 77:组合
- Apifox,你的API接口文档卷成这样了吗?
- Common fitting models and application methods of PCL
- What are the characteristics of the operation and maintenance management system
猜你喜欢
What are the characteristics of the operation and maintenance management system
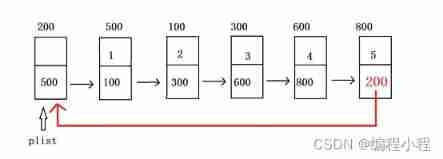
Linear list --- circular linked list
wireshark安装
![[Mori city] random talk on GIS data (II)](/img/5a/dfa04e3edee5aa6afa56dfe614d59f.jpg)
[Mori city] random talk on GIS data (II)
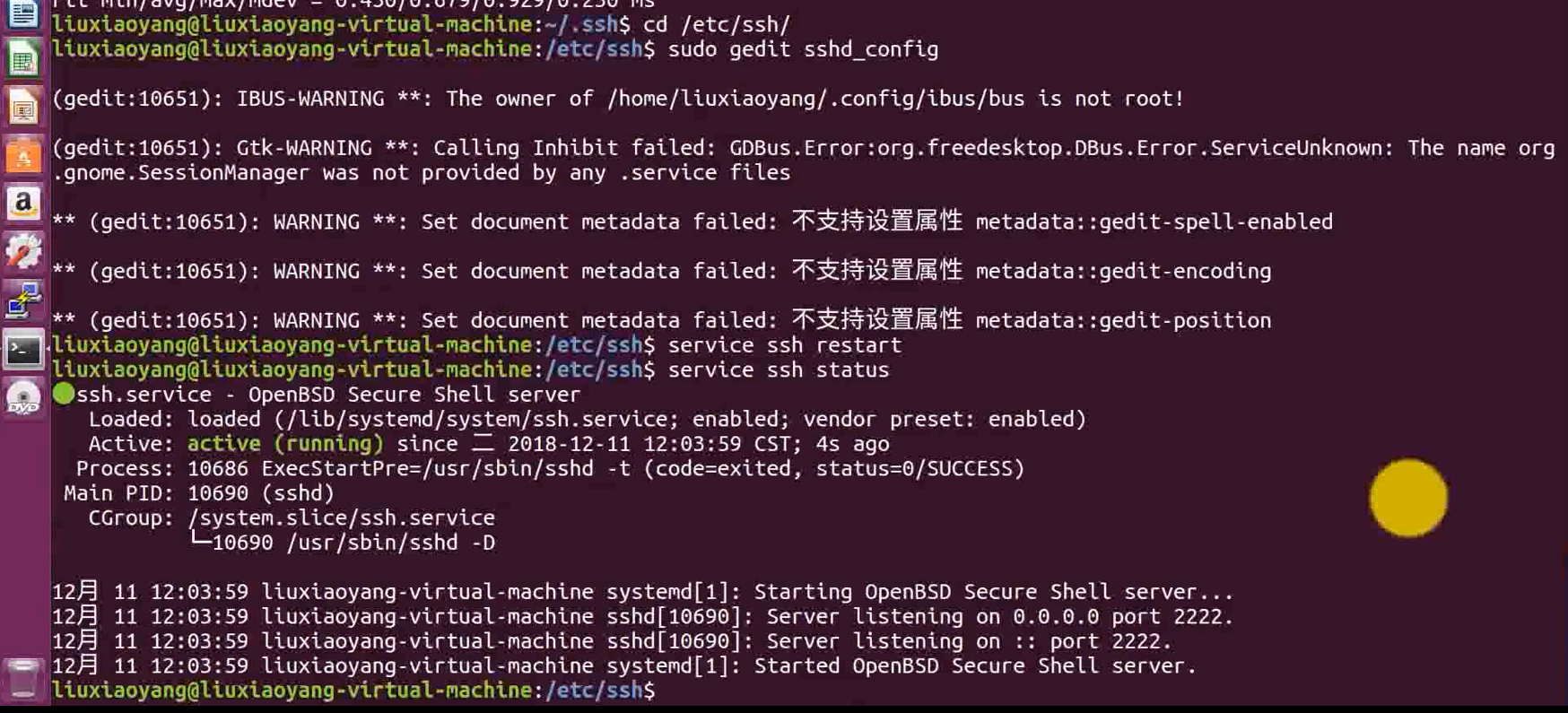
6-6 vulnerability exploitation SSH security defense

慧通编程入门课程 - 2A闯关

你不可不知道的Selenium 8种元素定位方法,简单且实用

Pioneer of Web3: virtual human
从零安装Redis
Redis入门完整教程:复制原理
随机推荐
MySQL - common functions - string functions
Statistics of radar data in nuscenes data set
Unity webgl adaptive web page size
AWS学习笔记(一)
如何设计好接口测试用例?教你几个小技巧,轻松稿定
The annual salary of general test is 15W, and the annual salary of test and development is 30w+. What is the difference between the two?
Redis入门完整教程:客户端案例分析
C # / vb. Net supprime le filigrane d'un document word
What are the applications and benefits of MES management system
Django database (SQLite) basic introductory tutorial
6-6 vulnerability exploitation SSH security defense
Metaforce force meta universe fossage 2.0 smart contract system development (source code deployment)
你不可不知道的Selenium 8种元素定位方法,简单且实用
Redis入门完整教程:问题定位与优化
Leetcode:minimum_ depth_ of_ binary_ Tree solutions
Huitong programming introductory course - 2A breakthrough
MATLB|具有储能的经济调度及机会约束和鲁棒优化
PCL 常用拟合模型及使用方法
Linear list --- circular linked list
Five reasons for clothing enterprises to deploy MES management system