当前位置:网站首页>pcl点云数据 转化为 Eigen::Map
pcl点云数据 转化为 Eigen::Map
2022-08-04 00:03:00 【Darchan】
pcl点云数据转化为Eigen::Map
需求:了解getMatrixXfMap()函数参数与相关用法,点云程序进行CUDA转写时,可能用到。
1.函数说明:
1.1 优势说明
点云数据点格式转换为矩阵格式进行计算,如果直接进行赋值,会重新开辟内存空间,对大数据点云来说并不现实。
因此使用Eigen::Map进行内存映射,节省内存空间,加快处理速度。
1.2 函数原型
// pcl/point_cloud.h文件中
inline Eigen::Map<Eigen::MatrixXf, Eigen::Aligned, Eigen::OuterStride<> >
getMatrixXfMap (int dim, int stride, int offset)
注意:
从 pcl1.4.0 开始,Eigen 矩阵被强制为行优先(Row Major) 以提高 PCL 中算法的效率。
原文中:通过正确地 1比1方式 映射 PointCloud 结构到Eigen::Map中,即:点云中的点数 = 矩阵中的行数,点维度 = 矩阵中的列数。
本文得到结论与原文行列是相反的,点云中的点数 = 矩阵中的列,点维度 = 矩阵中的行数,如getMatrixXfMap(4,4,0)可以将xyzi点云数据转化为 4*size 的点云矩阵。
1.3 参数说明
- 参数1:
dim,每一个点需要顾及到的维度 - 参数2:
stride, 每一个点中所包含的值的数目 - 参数3:
offset,从每一个点起始位置,跳过的数目
1.4 具体实例
- 新建一个点云,点云的x,y,z,i分别按照索引值进行赋值,方便打印查看。
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud_test(new pcl::PointCloud<pcl::PointXYZI>);
for (int i = 0; i < 10; i++) {
pcl::PointXYZI p;
p.x = i;
p.y = i;
p.z = i;
p.intensity = i;
cloud_test->points.push_back(p);
}
2)使用转换函数提取xyz坐标值
auto pc_matrix = cloud_test->getMatrixXfMap(3,8,0);
说明:为何是(3,8,0)?
因为每一个点取xyz三个维度,故第一个dim取3。第三个偏移值从首位x开始,故第三个参数offset=0。
第二个值为何取8?
开始可能会存在疑问,因为每一个点都是xyzi ,包含4个浮点数,按说应该是4才对,但是查看pcl::PointXYZI结构的组织形式如下,我们发现data[3]并非intensity强度值,而是赋值1.0f。
进一步,查看EIGEN_ALIGN16,发现采用16字节对齐方式,一个浮点数float占据4个字节。即这8个浮点数分别是x,y,z,data[3]=1.0f, data[4]=intensity,data[5] ,data[6] ,data[7]。(其中data[5] ,data[6] ,data[7]并未赋值)
// PointXYZI结构体
struct PointXYZI : public _PointXYZI
{
inline PointXYZI (const _PointXYZI &p)
{
x = p.x; y = p.y; z = p.z; data[3] = 1.0f;
intensity = p.intensity;
}
}
// EIGEN_ALIGN16 16字节对齐
struct EIGEN_ALIGN16 _PointXYZI
{
PCL_ADD_POINT4D; // This adds the members x,y,z which can also be accessed using the point (which is float[4])
union
{
struct
{
float intensity;
};
float data_c[4];
};
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
};
- 使用转换函数提取intensity矩阵
auto trans_cloudi = cloud_test->getMatrixXfMap(1,8,4);
4)打印pc_matrix和trans_cloudi值,得到4*10的矩阵
结果图: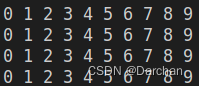
同样可以通过属性,查看矩阵维度,如下:
auto col = pc_matrix.row(0).size(); // 10
auto row = pc_matrix.col(0).size(); // 3
auto intensity_col = trans_cloudi.row(0).size(); // 10
边栏推荐
猜你喜欢

Prometheus监控Harbor(二进制版)

汉字风格迁移---结合本地和全局特征学习的中文字体迁移
逆波兰表达式求值
Nanoprobes丨Nanogold-抗体和链霉亲和素偶联物
689. 三个无重叠子数组的最大和

浅谈我国产业园区未来的发展方向
2022-08-03: What does the following go code output?A: 2; B: 3; C: 1; D: 0.package main import "fmt" func main() { slice := []i

jav一键生成数据库文档

国内首发可视化智能调优平台,小龙带你玩转KeenTune UI
Using matlab to solve the linear optimization problem based on matlab dynamic model of learning notes _11 】 【
随机推荐
Using matlab to solve the linear optimization problem based on matlab dynamic model of learning notes _11 】 【
Minimized installation of debian11
汉字风格迁移---结合本地和全局特征学习的中文字体迁移
并查集详解
一文搞定 SQL Server 执行计划
小米--测试开发
POE交换机全方位解读(下)
V8中的快慢数组(附源码、图文更易理解)
Internship: Upload method for writing excel sheet (import)
初始 List 接口
BPF 可移植性和 CO-RE(一次编译,到处运行)
国内首发可视化智能调优平台,小龙带你玩转KeenTune UI
求解同余方程 数论 扩展欧几里得
libnet
The world's first mass production, with the most fixed points!How does this AVP Tier1 lead?
带你造轮子,自定义一个随意拖拽可吸边的悬浮View组件
【每日一题】899. 有序队列
米哈游--测试开发提前批
七夕活动浪漫上线,别让网络拖慢和小姐姐的开黑时间
C语言实验十五 文件