当前位置:网站首页>宏定义问题记录day2
宏定义问题记录day2
2022-08-02 14:02:00 【熬夜退役选手337】
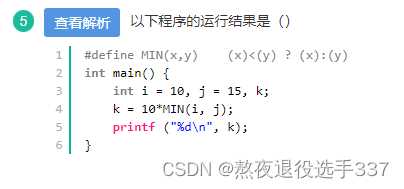
我算出来的答案是100
(x)<(y)? (x):(y) 的意思就是x小于y吗,如果是就输出x,不是就输出y
那 i < j ,输出的应该是 i =10
看到 k=10*MIN(i,j),我刚开始就理解成是k=10*i=100
这个运算结果是错误的
本题的答案为15,为什么呢?
因为宏定义是整个替换,而不是计算输出后的结果
也就是说 k=10*MIN(i,j)就是10*(x)<(y)? (x):(y),带入i和j,很明显100>15,所以k=y=15

如有帮助请一键三连,蟹蟹!!!
如有帮助请一键三连,蟹蟹!!!
如有帮助请一键三连,蟹蟹!!!
边栏推荐
- The IDEA of packaged jar package
- chapter6可视化(不想看版)
- Deep learning framework pytorch rapid development and actual combat chapter3
- Briefly write about the use and experience of PPOCRLabel
- 编程规范——LiteOS
- STM32 (F407) - stack
- Raj delivery notes - separation 第08 speak, speaking, reading and writing
- ToF相机从Camera2 API中获取DEPTH16格式深度图
- Sentinel源码(六)ParamFlowSlot热点参数限流
- 跑yolov5又出啥问题了(1)p,r,map全部为0
猜你喜欢
ROS通信 —— 节点,Nodes & Master](/img/f5/c541259b69a0db3dc15a61e87f0415.png)
[ROS](05)ROS通信 —— 节点,Nodes & Master
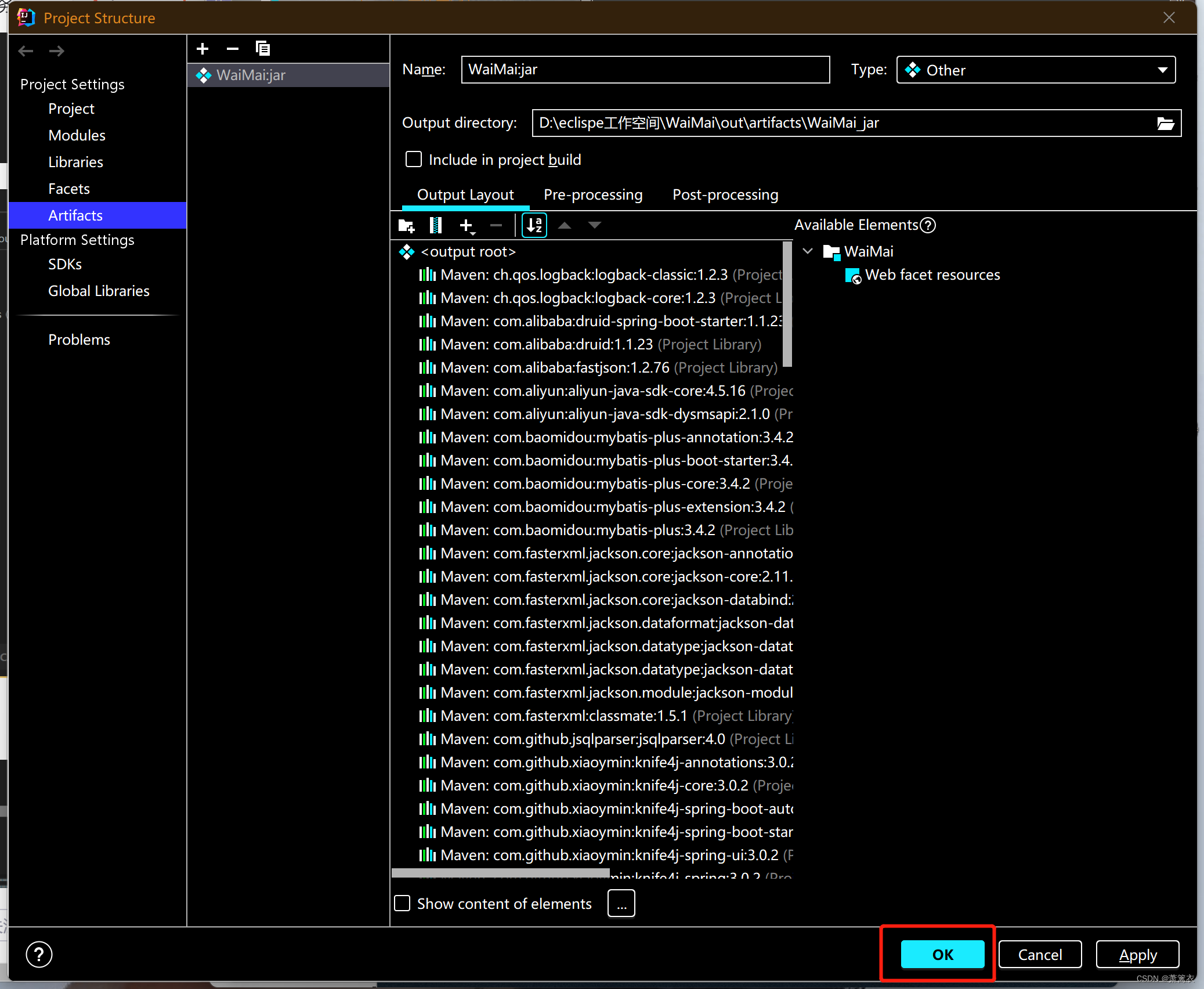
IDEA打包jar包
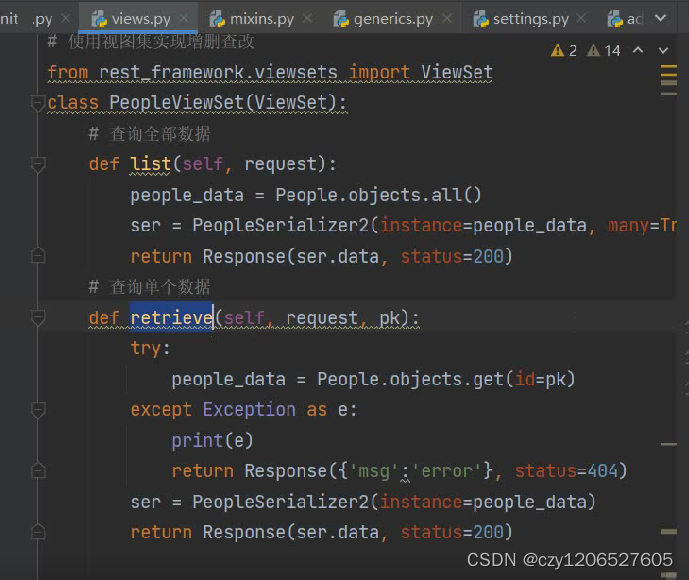
第十四单元 视图集及路由

The specific operation process of cloud GPU (Hengyuan cloud) training
![[ROS] (06) ROS Communication - Topic Communication](/img/21/d79f2c4e246eb9ea39df9c7435bb36.png)
[ROS] (06) ROS Communication - Topic Communication
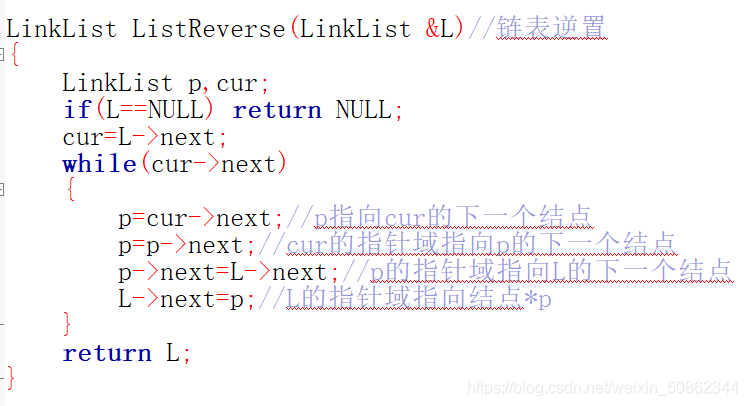
8581 Linear linked list inversion
chapter7
![[ROS] Introduction to common tools in ROS (to be continued)](/img/ea/e390106f750bf697e62a3a296014d2.png)
[ROS] Introduction to common tools in ROS (to be continued)
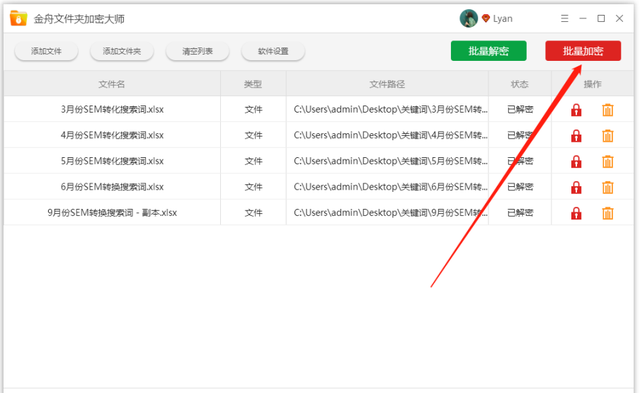
What are the file encryption software?Keep your files safe
Creating seven NiuYun Flask project complete and let cloud
随机推荐
redis延时队列
Verilog学习 系列
How to solve 1045 cannot log in to mysql server
Unit 14 Viewsets and Routing
第六单元 初识ORM
Unit 6 meet ORM
drf源码分析与全局捕获异常
IDEA打包jar包
Unit 8 Middleware
[ROS](01)创建ROS工作空间
Programming Specifications - LiteOS
Creating seven NiuYun Flask project complete and let cloud
浅浅写一下PPOCRLabel的使用及体验
8583 顺序栈的基本操作
Camera Hal(Hal3)层修改Preview流
Error Correction Design Principle of Hamming Check Code
Hands-on OCR (1)
[ROS] (04) Detailed explanation of package.xml
The most complete ever!A collection of 47 common terms of "digital transformation", read it in seconds~
鼠标右键菜单栏太长如何减少