当前位置:网站首页>STM32 key chattering elimination - entry state machine thinking
STM32 key chattering elimination - entry state machine thinking
2022-07-06 00:32:00 【Hua Weiyun】
1 State machine thinking
State machine , Or finite state machine FSM(Finite State Machine), Is an important programming idea .
The state machine has 3 elements : state 、 event And Respond to
event : What is going on? ?
Respond to : In this state, something like this happens , How does the system handle ?
Before state machine programming , First, according to the functions to be realized , Sort out a corresponding state transition diagram ( The state machine diagram ), Then you can use this state transition diagram , Apply the state machine programming template , The implementation corresponds to the state machine code .
State machine programming mainly includes 3 Methods :switch-case Law 、 Table driven method 、 Function pointer method , This article first introduces the simplest and easiest to understand switch-case Law .
2 State machine instance
The following is the key shake elimination function , To introduce switch-case Law State machine programming ideas .
2.1 Button anti shake state transition diagram
Before state machine programming , First of all, the state machine corresponding to the function needs several states , The key function of this example , Only the most basic pressed and released states are detected ( Long press will not be realized for the time being 、 Double click status ), And add the corresponding button de dithering function , therefore , Need to use 4 Status :
Stable release state
Press jitter status
Steady press state
Release the jitter state
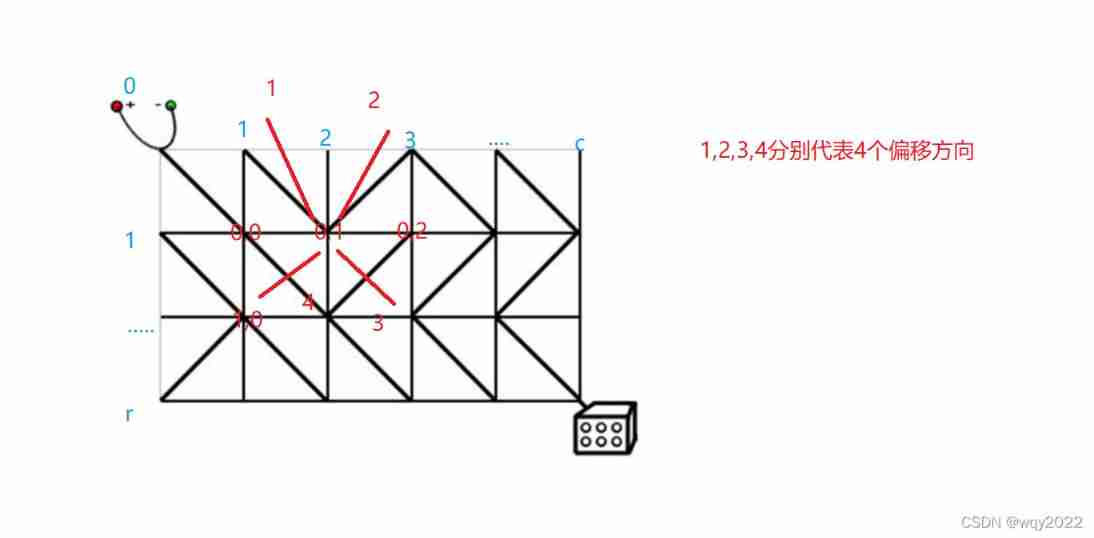
The corresponding state transition diagram is as follows :

Because the key is usually released , Here, let the initialization state of the state machine be the released state , And here 4 Switch back and forth between states .
In the picture VT Represents the level detected by the key ,VT=0 That is, low level is detected , It may be a key press , From the initial “ Stable release ” The state changes to “ Press jitter ” state
When a low level is continuously detected (VT=0) After a while , It is considered that the chattering elimination is completed , from “ Press jitter ” The state changes to “ Press steadily ” state
stay “ Press jitter ” In the state of , Within a specified period of time , High level detected again (VT=1), It shows that the button jitters ( For example, the key is quickly pushed and then bounced up , Or key jitter caused by strong vibration ), By “ Press jitter ” The state changes to “ Stable release ” state
2.2 Programming to realize
2.2.1 State definition
Corresponding to the above button state diagram , You know you need to use 4 Status :
Stable release state (KS_RELEASE)
Press jitter status (KS_PRESS_SHAKE)
Steady press state (KS_PRESS)
Release the jitter state (KS_RELEASE_SHAKE)
Enumerations are used here to define this 4 Status . For debugging , The corresponding state name can be printed in the form of string , Use here Macro definition A little trick for :
# Symbol + Custom enumeration name It can be automatically converted to string form , Then put these strings into const char* key_status_name[] Array , You can access the string name form of these states in the form of an array .
Besides , In order not to repeatedly write the enumeration name and the corresponding enumeration string (#+ Enumeration name ), Further use of macro definitions , Define the state only once , Then define the following two macros , Realize to Enumeration item and The string corresponding to the enumeration item Separate acquisition of :
#define ENUM_ITEM(ITEM) ITEM,#define ENUM_STRING(ITEM) #ITEM,Specifically, the macro definition 、 The enumeration definition and enumeration name array are declared as follows :
#define ENUM_ITEM(ITEM) ITEM,#define ENUM_STRING(ITEM) #ITEM,#define KEY_STATUS_ENUM(STATUS) \ STATUS(KS_RELEASE) /* Stable release state */ \ STATUS(KS_PRESS_SHAKE) /* Press jitter status */ \ STATUS(KS_PRESS) /* Steady press state */ \ STATUS(KS_RELEASE_SHAKE) /* Release the jitter state */ \ STATUS(KS_NUM) /* The total number of States ( Invalid state )*/ \ typedef enum{ KEY_STATUS_ENUM(ENUM_ITEM)}KEY_STATUS;const char* key_status_name[] = { KEY_STATUS_ENUM(ENUM_STRING)};Macro definitions are difficult to understand , Macro definitions can be brought into , To the final result , Understand the specific form after replacement , For example, the following macro definitions are used to carry in the replacement diagram :
/*KEY_STATUS_ENUM(STATUS) --> STATUS(KS_RELEASE) ... STATUS(KS_NUM)KEY_STATUS_ENUM(ENUM_ITEM)--> ENUM_ITEM(KS_RELEASE) ... ENUM_ITEM(KS_NUM)--> KS_RELEASE, ... KS_NUM,KEY_STATUS_ENUM(ENUM_STRING)--> ENUM_STRING(KS_RELEASE) ... ENUM_STRING(KS_NUM)--> #KS_RELEASE, ... #KS_NUM,*/2.2.2 State machine implementation
The following is the implementation of the state machine :
State machine function key_status_check In a cycle , Every 10ms Call once
Define a g_keyStatus Indicates the state of the state machine
In each cycle ,switch According to the current state , Execute the logic required by the corresponding state
Define a g_DebounceCnt It is used to calculate the buffeting time , When it continues to enter the de chattering state , Each cycle (10ms) Add... To this value 1, Last for a certain number of times (5 Time , namely 50ms), Press or release considered stable , Buffeting complete , Jump to stable direction or stable release state
In the execution logic of each state , When it is detected that certain conditions are met , Jump to another state
Through the continuous jump of state , Realize the running of state machine
Besides , For the convenience of observing the change of state in the state machine , Defined a g_lastKeyStatus Indicates the previous status , When the state changes , You can print out the status name
KEY_STATUS g_keyStatus = KS_RELEASE; // The status of the current key KEY_STATUS g_lastKeyStatus = KS_NUM; // Last state int g_DebounceCnt = 0; // Buffeting time count void key_status_check(){ switch(g_keyStatus) { // Key release ( The initial state ) case KS_RELEASE: { // Low level detected , First, eliminate the chattering if (KEY0 == 0) { g_keyStatus = KS_PRESS_SHAKE; g_DebounceCnt = 0; } } break; // Press jitter case KS_PRESS_SHAKE: { g_DebounceCnt++; // It's really jittery if (KEY0 == 1) { g_keyStatus = KS_RELEASE; } // Buffeting complete else if (g_DebounceCnt == 5) { g_keyStatus = KS_PRESS; printf("=====> key press\r\n"); } } break; // Press steadily case KS_PRESS: { // High level detected , First, eliminate the chattering if (KEY0 == 1) { g_keyStatus = KS_RELEASE_SHAKE; g_DebounceCnt = 0; } } break; // Release the jitter case KS_RELEASE_SHAKE: { g_DebounceCnt++; // It's really jittery if (KEY0 == 0) { g_keyStatus = KS_PRESS; } // Buffeting complete else if (g_DebounceCnt == 5) { g_keyStatus = KS_RELEASE; printf("=====> key release\r\n"); } } break; default:break; } if (g_keyStatus != g_lastKeyStatus) { g_lastKeyStatus = g_keyStatus; printf("new key status:%d(%s)\r\n", g_keyStatus, key_status_name[g_keyStatus]); }}int main(void){ delay_init(); // Delay function initialization KEY_Init(); uart_init(115200); printf("hello\r\n"); while(1) { key_status_check(); delay_ms(10); }}notes : This routine requires the use of a key , You need to initialize the corresponding GPIO, No more code here .
2.3 Use tests
Compile and burn the complete code into the board , Connect the serial port , Press and release the key , Observe the serial port output information .
My test output information is as follows :

The first two toggles the button to simulate the shaking of the button , You can see that the serial port prints two state switches from release to press jitter .
Then press the key , Release the button again , You can see the change of state : Release -> Press jitter -> Press down -> Release the jitter -> Release
3 summary
边栏推荐
- 如何解决ecology9.0执行导入流程流程产生的问题
- Folding and sinking sand -- weekly record of ETF
- NSSA area where OSPF is configured for Huawei equipment
- 【文件IO的简单实现】
- 【DesignMode】适配器模式(adapter pattern)
- Atcoder beginer contest 258 [competition record]
- 时间戳的拓展及应用实例
- Classic CTF topic about FTP protocol
- 7.5 decorator
- FFMPEG关键结构体——AVFrame
猜你喜欢
Recognize the small experiment of extracting and displaying Mel spectrum (observe the difference between different y_axis and x_axis)
Search (DFS and BFS)

选择致敬持续奋斗背后的精神——对话威尔价值观【第四期】
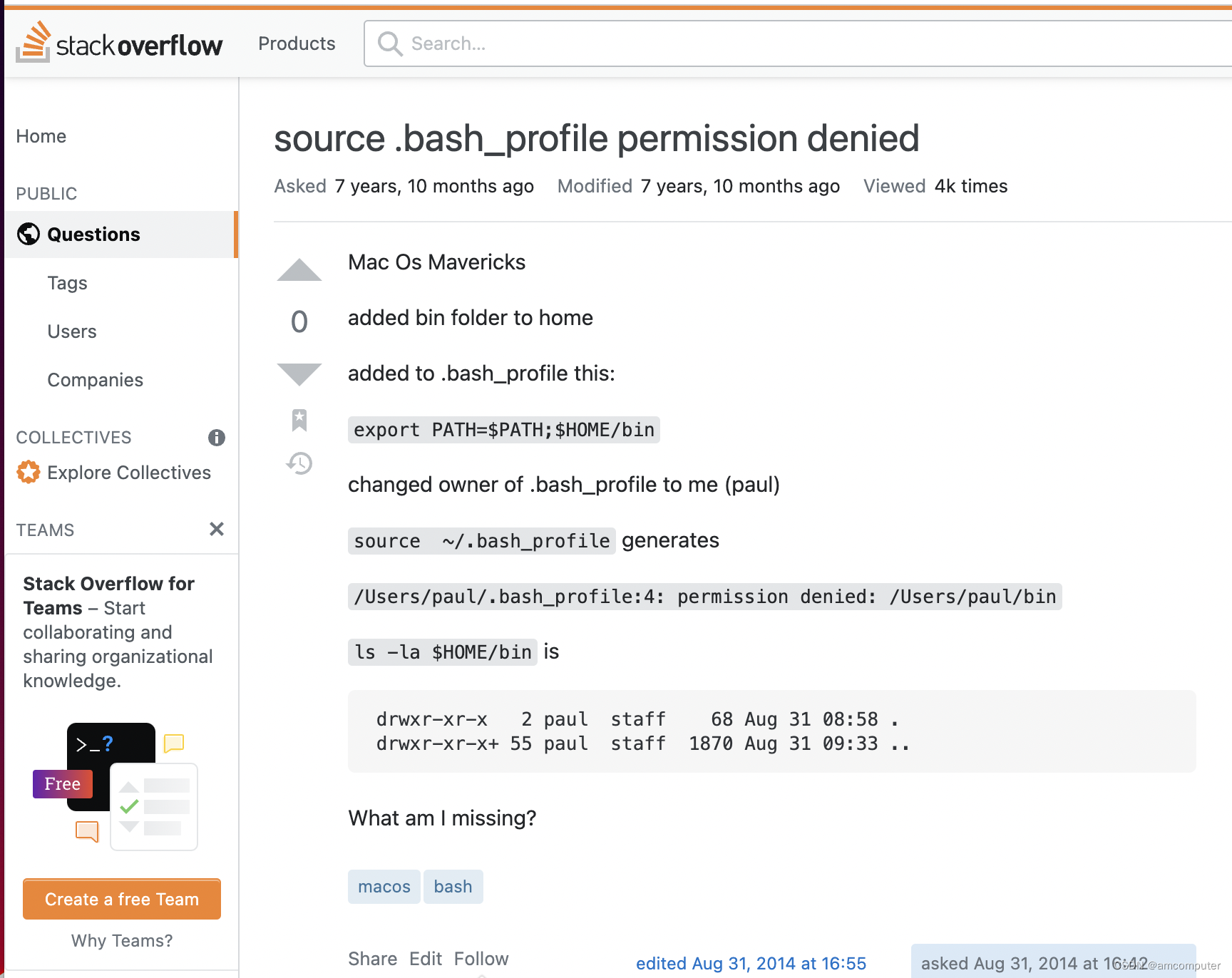
权限问题:source .bash_profile permission denied
Hardware and interface learning summary
Idea远程提交spark任务到yarn集群
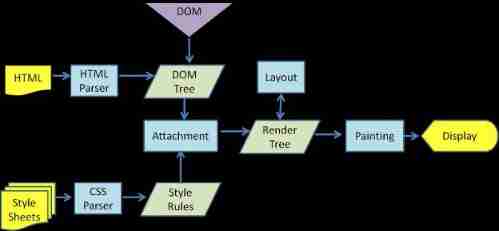
Browser reflow and redraw
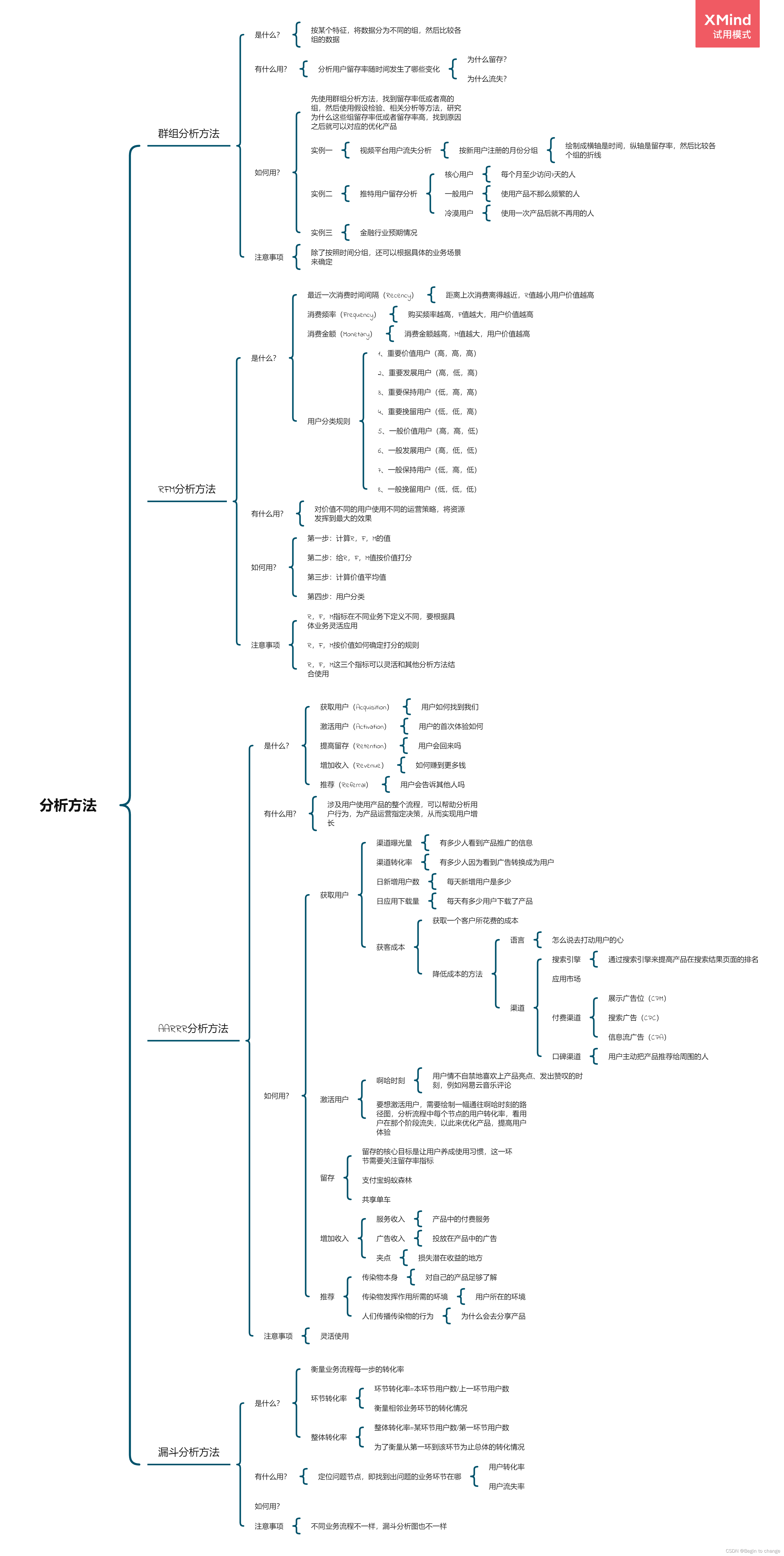
Data analysis thinking analysis methods and business knowledge - analysis methods (III)
MySql——CRUD
Huawei equipment is configured with OSPF and BFD linkage
随机推荐
wx. Getlocation (object object) application method, latest version
时间戳的拓展及应用实例
FFT learning notes (I think it is detailed)
Single source shortest path exercise (I)
Natural language processing (NLP) - third party Library (Toolkit):allenlp [library for building various NLP models; based on pytorch]
uniapp开发,打包成H5部署到服务器
QT -- thread
[designmode] composite mode
Browser reflow and redraw
【文件IO的简单实现】
Notepad++ regular expression replacement string
The global and Chinese markets of dial indicator calipers 2022-2028: Research Report on technology, participants, trends, market size and share
LeetCode 6004. Get operands of 0
Common API classes and exception systems
Pointer pointer array, array pointer
云导DNS和知识科普以及课堂笔记
LeetCode 8. String conversion integer (ATOI)
认识提取与显示梅尔谱图的小实验(观察不同y_axis和x_axis的区别)
DEJA_ Vu3d - cesium feature set 055 - summary description of map service addresses of domestic and foreign manufacturers
7.5 decorator