当前位置:网站首页>Stm32f1 and stm32cubeide programming example - rotary encoder drive
Stm32f1 and stm32cubeide programming example - rotary encoder drive
2022-07-08 00:02:00 【Visual intelligence】
Rotary encoder drive
1、 Introduction to rotary encoder
Rotary encoder , Also known as shaft encoder , It is a kind of electromechanical equipment , The angular position or movement of the shaft or shaft can be converted into analog or digital output signals . There are two main types of rotary encoders : Absolute and incremental . The output of the absolute encoder indicates the current axis position , Make it an angle sensor . The output of the incremental encoder provides information about shaft motion , This information is usually processed into locations elsewhere 、 Speed, distance and other information .

Rotary encoders are widely used in applications that require monitoring or control of mechanical systems, or both , Including industrial control 、 robot 、 Photographic lens 、 Computer input device ( Such as optical mechanical mouse and trackball )、 Controlled stress rheometer and rotating radar platform .
The encoder technology types are as follows :
- conductive : Etch in PCB A series of circumferential copper traces on the are used to encode information . The contact brush senses the conductive area . In addition to the user input in the digital multimeter , This form of encoder is now rare .
- optics : This uses light that strikes the photodiode through a slit in a metal or glass disk . Reflective versions also exist . This is one of the most common technologies . Optical encoder is very sensitive to dust .
- Coaxial magnetic : This technique usually uses special magnetization attached to the motor shaft 2 Neodymium magnet . Because it can be fixed at the end of the shaft , Therefore, it can be used with a motor with only one shaft extending out of the motor body . Accuracy can vary from a few degrees to less 1 degree . The resolution can be as low as 1 Degrees or as high as 0.09 degree (4000 CPR, Count per revolution ). Poorly designed internal interpolation will cause output jitter , But this can be overcome by averaging the internal samples .
- Off axis magnetism
边栏推荐
- Solutions to problems in sqlserver deleting data in tables
- AWS AWS help error
- go time包常用函数
- STM32F1与STM32CubeIDE编程实例-旋转编码器驱动
- SQL uses the in keyword to query multiple fields
- Archery installation test
- 光流传感器初步测试:GL9306
- 关于组织2021-2022全国青少年电子信息智能创新大赛西南赛区(四川)复赛的通知
- DataGuard active / standby cleanup archive settings
- Ping error: unknown name or service
猜你喜欢

UIC564-2 附录4 –阻燃防火测试:火焰的扩散

ROS from entry to mastery (IX) initial experience of visual simulation: turtlebot3

【编程题】【Scratch二级】2019.09 绘制雪花图案
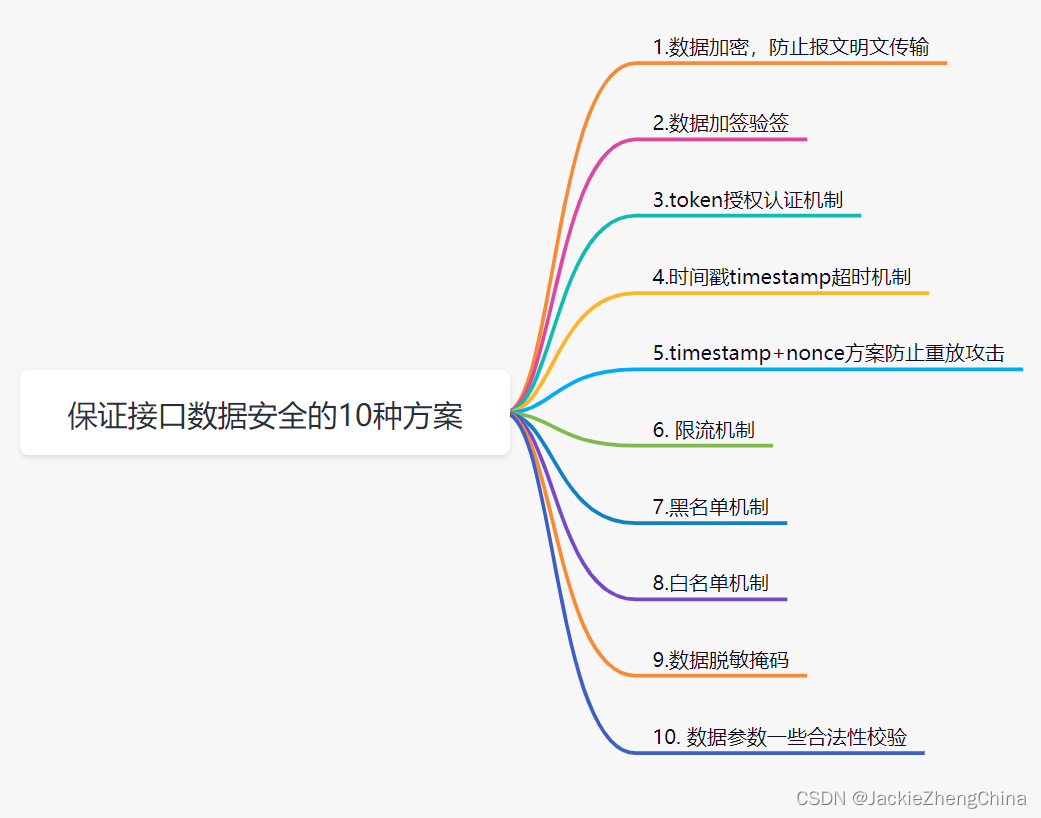
保证接口数据安全的10种方案
【编程题】【Scratch二级】2019.12 绘制十个正方形

Les mots ont été écrits, la fonction est vraiment puissante!

Aitm3.0005 smoke toxicity test
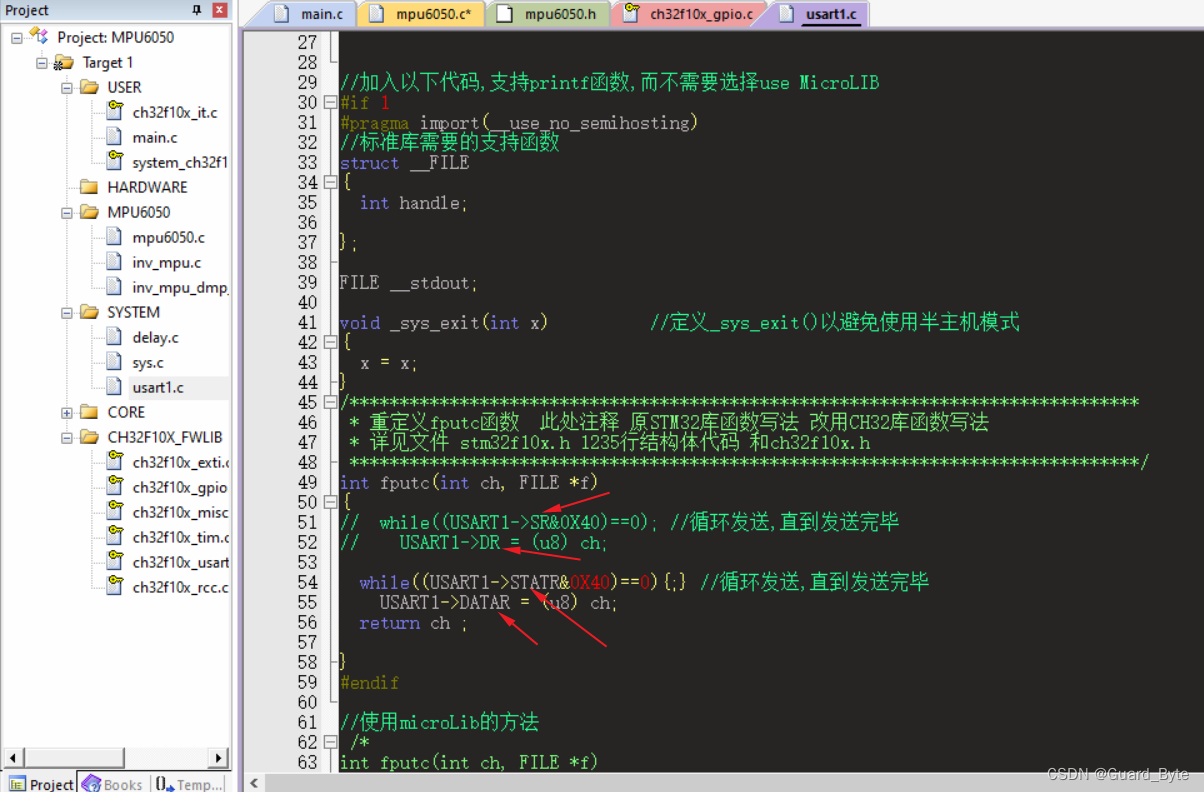
About the difference between ch32 library function and STM32 library function

80% of the people answered incorrectly. Does the leaf on the apple logo face left or right?
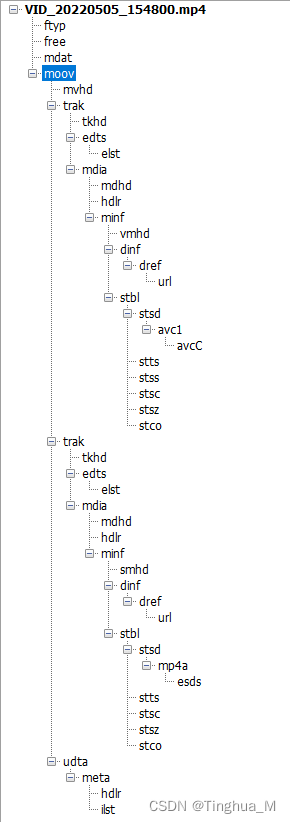
MP4文件格式解析之结合实例分析
随机推荐
P1055 [noip2008 popularization group] ISBN number
【编程题】【Scratch二级】2019.03 垃圾分类
HB 5469民用飞机机舱内部非金属材料燃烧试验方法
Tools for debugging makefiles - tool for debugging makefiles
Robomaster visual tutorial (10) target prediction
【編程題】【Scratch二級】2019.12 飛翔的小鳥
Apng2gif solutions to various problems
Database query - what is the highest data?
Problems faced when connecting to sqlserver after downloading (I)
Go learning notes (2) basic types and statements (1)
UIC564-2 附录4 –阻燃防火测试:火焰的扩散
webflux - webclient Connect reset by peer Error
[path planning] use the vertical distance limit method and Bessel to optimize the path of a star
QT and OpenGL: loading 3D models using the open asset import library (assimp) - Part 2
Preliminary test of optical flow sensor: gl9306
[programming problem] [scratch Level 2] March 2019 draw a square spiral
全自动化处理每月缺卡数据,输出缺卡人员信息
Chisel tutorial - 00 Ex.scala metals plug-in (vs Code), SBT and coursier exchange endogenous
SQL connection problem after downloading (2)
用語雀寫文章了,功能真心强大!