当前位置:网站首页>Use of orbbec Astra depth camera of OBI Zhongguang in ROS melody
Use of orbbec Astra depth camera of OBI Zhongguang in ROS melody
2022-07-05 07:41:00 【LCH Nan'an】
Catalog
Introduction to personal construction :
3、 ... and . Download feature pack
Four . establish astra udev The rules
6、 ... and . Compile in the workspace astra_camera
7、 ... and . Filter enabled ( Not recommended : It is recommended to try the main branch first )
8、 ... and . function astra_camera
1. Open a new terminal , Input :roscore( Do not shut down. )
2. Return to the original terminal ( Do not shut down. )
3. Open a new terminal ( Do not shut down. )
Introduction to personal construction :
Ubuntu:18.04
Installation tutorial :VMware+Ubuntu18.04
ROS:Melodic
Installation tutorial :Ubuntu18.04 install Ros
Orbbec Astra: Environment building
course :Ubuntu 20.04 Next, build Obi Zhongguang -Astra (18.04 Edition and 20.04 The steps of version are the same )
Please carry out the following operations after the above are built
One . Installation dependency
sudo apt install ros-$ROS_DISTRO-rgbd-launch ros-$ROS_DISTRO-libuvc ros-$ROS_DISTRO-libuvc-camera ros-$ROS_DISTRO-libuvc-rosTwo . Configure workspace
1. After installing the dependent files , You need to create a new workspace for Astra Camera's ROS Development ( If you don't have a workspace )
mkdir -p ~/catkin_ws/src
2. Configure the environment variables for the workspace
cd ~/catkin_ws/
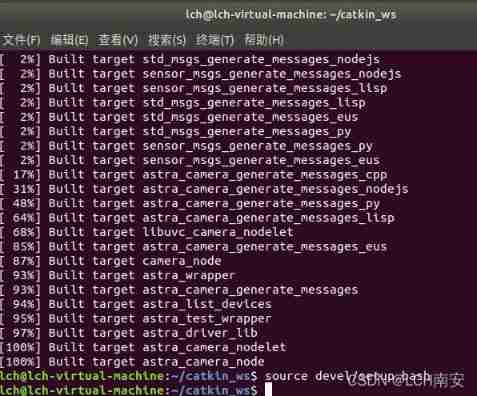
catkin_make
source devel/setup.bash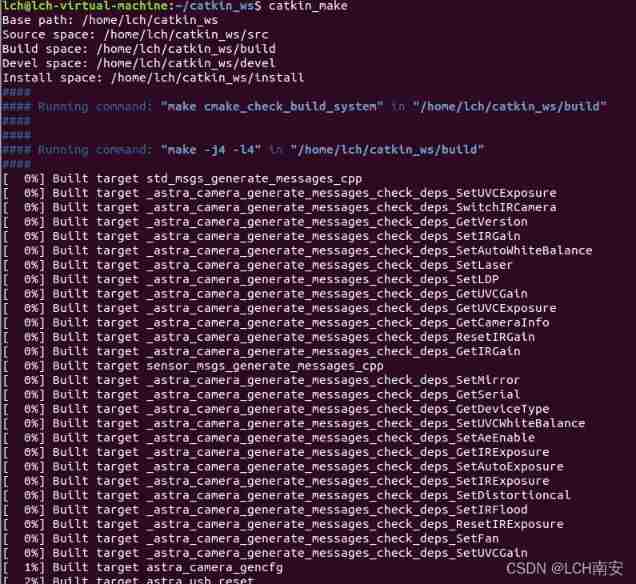
( Use zsh The direct of the terminal will bash Switch to zsh That's all right. , The same below )
If you set the environment variable like this , Then this environment variable is only valid for this terminal , To open another terminal, you need to set the environment variable again ( Not solved yet )
3. Check that the environment variable is in effect
Input :
echo $ROS_PACKAGE_PATHOutput :

3、 ... and . Download feature pack
cd ~/catkin_ws/src
git clone https://github.com/orbbec/ros_astra_camerawithout “ Science and the Internet ” Methods ,git clone https://github.com/orbbec/ros_astra_camera This step may not be performed , You can try downloading on your own computer , Then place the downloaded folder in ~/catkin_ws/src Next
Four . establish astra udev The rules
roscd astra_camera
./scripts/create_udev_rules 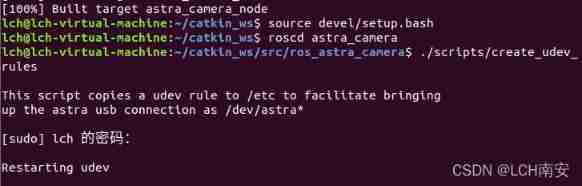
6、 ... and . Compile in the workspace astra_camera
cd ~/catkin_ws
catkin_make --pkg astra_camera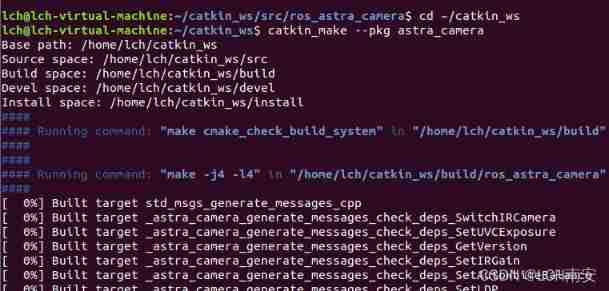
7、 ... and . Filter enabled ( Not recommended : It is recommended to try the main branch first )
Astra The driver provides normal and filtering methods . Use the filter driver , We can get more accurate depth data , But it will cost more computing resources . If the program will be executed on the embedded system , We suggest using the common method . You can change the method as follows .-DFILTER=ON / OFF catkin_make --pkg astra_camera -DFILTER=OFF 
8、 ... and . function astra_camera
1. Open a new terminal , Input :roscore( Do not shut down. )
2. Return to the original terminal ( Do not shut down. )
① Use Astra
roslaunch astra_camera astra.launch② Use Astra Stereo S (w/ UVC)
roslaunch astra_camera stereo_s.launch
3. Open a new terminal ( Do not shut down. )
Input... At the terminal :rviz

4. Subscription node
Current rviz No nodes have been subscribed to in , At this time, you can subscribe to view image information . Click on the bottom left Add Button selection image type , Add image node .
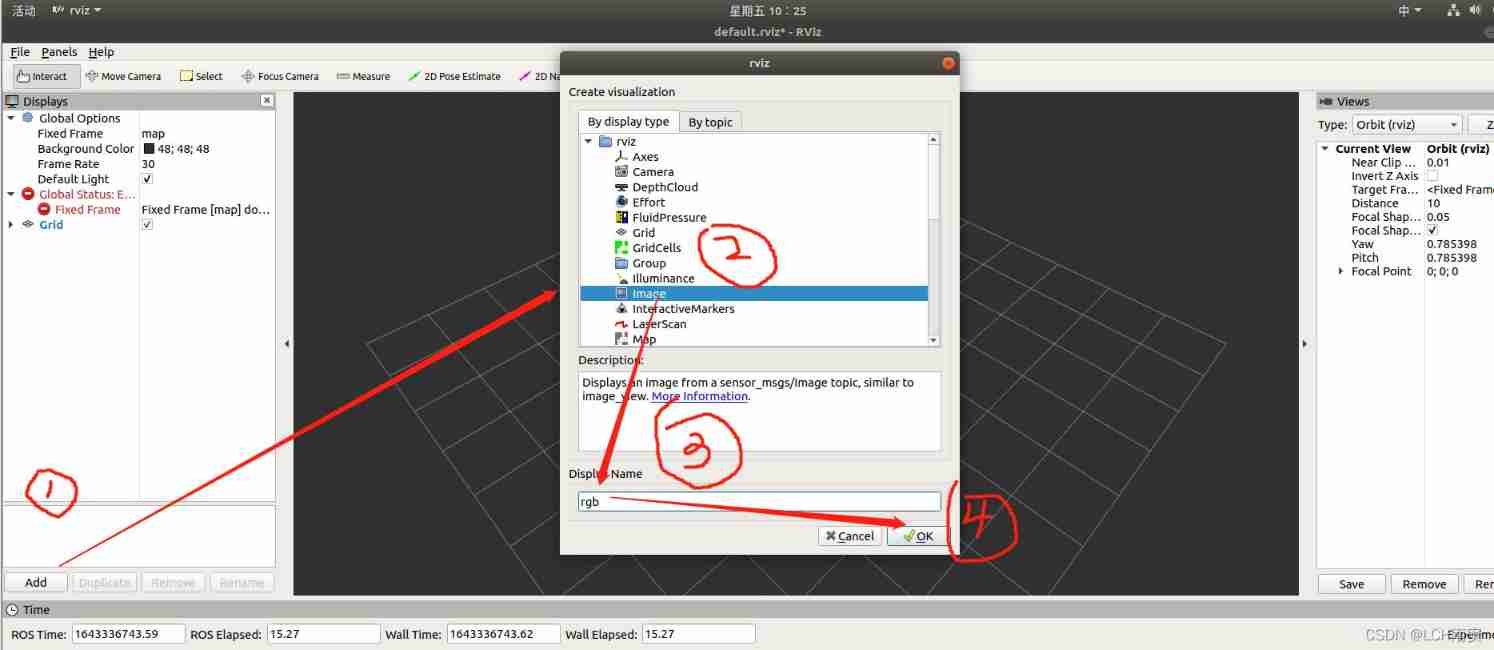
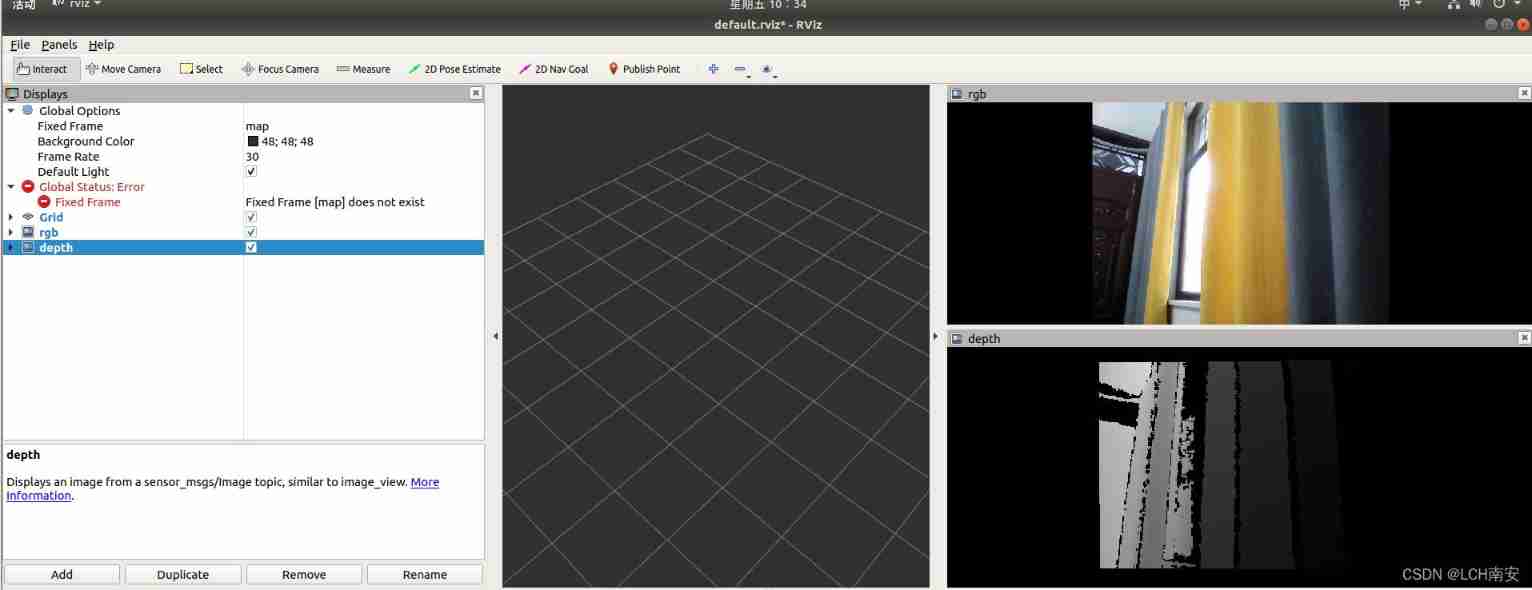
Then open the tab on the left image, stay image Topic Select the node you want to subscribe to in the .
Then repeat the above operation , Select different nodes to display different images
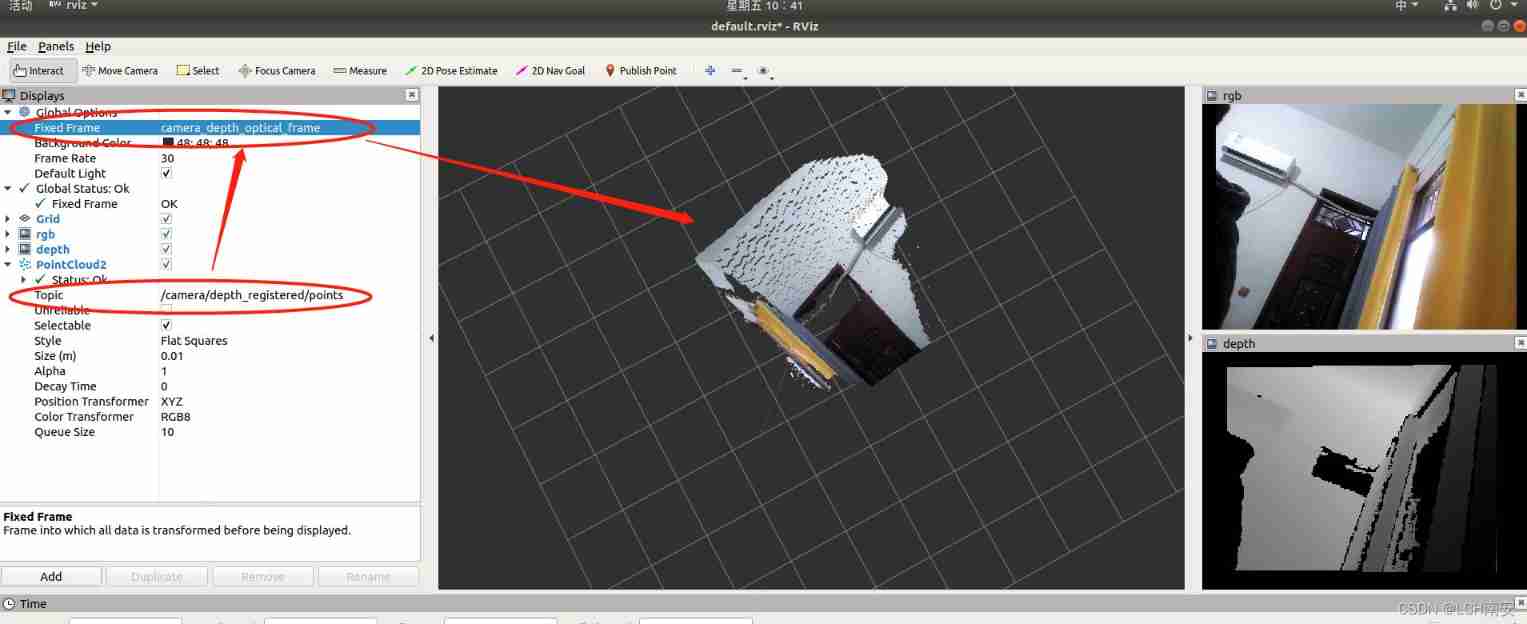
5. View point cloud
Click on the bottom left again Add Button , choice PointCloud2 Type new content .
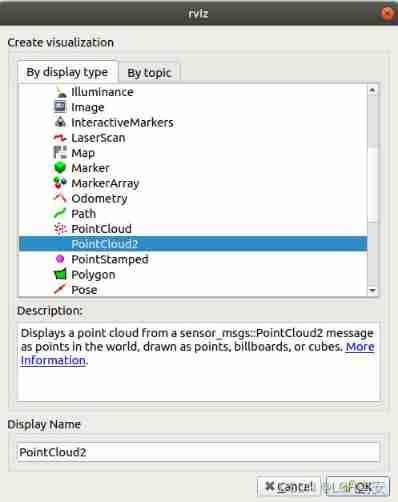
On the left side PointCloud2 Under options, subscribe /camera/depth_registered/points topic of conversation , And will Global Options Next Fixed Frame Selected as camera_depth_optical_frame. After the above operations are completed , You can view the point cloud options in the center .
Conclusion :
because Astra The camera is officially provided ROS Drive development , This driver currently only supports ROS Kinetic and Melodic edition ,
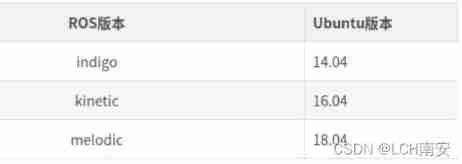
and Ubuntu20.04 Corresponding ROS Version is Noetic, So switch to war Ubuntu18.04.
I hope this article can help you .
边栏推荐
- Rename directory in C [closed] - renaming a directory in C [closed]
- 2022 PMP project management examination agile knowledge points (7)
- QT excellent articles
- Day01 markdown log entry tips
- Ugnx12.0 initialization crash, initialization error (-15)
- editplus
- Simple operation of running water lamp (keil5)
- I can't stand the common annotations of idea anymore
- Function and usage of function pointer
- Unforgettable summary of 2021
猜你喜欢
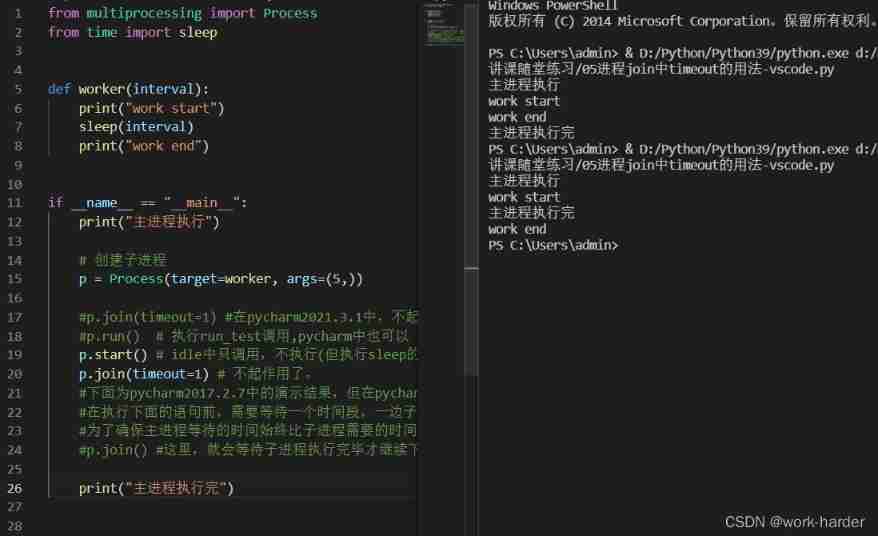
Differences between pycharm and idle and process -- join() in vs Code

QT small case "addition calculator"
Light up the running light, rough notes for beginners (1)
Opendrive arc drawing script
Package ‘*****‘ has no installation candidate
I implement queue with C I

Shadowless cloud desktop - online computer
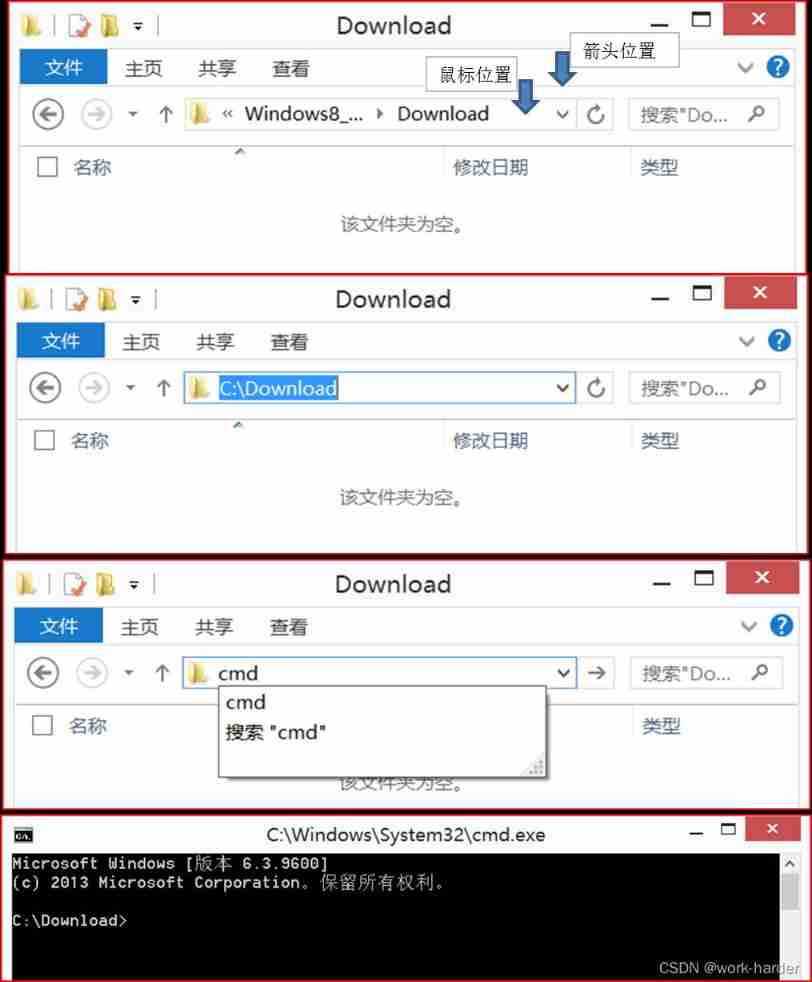
The folder directly enters CMD mode, with the same folder location
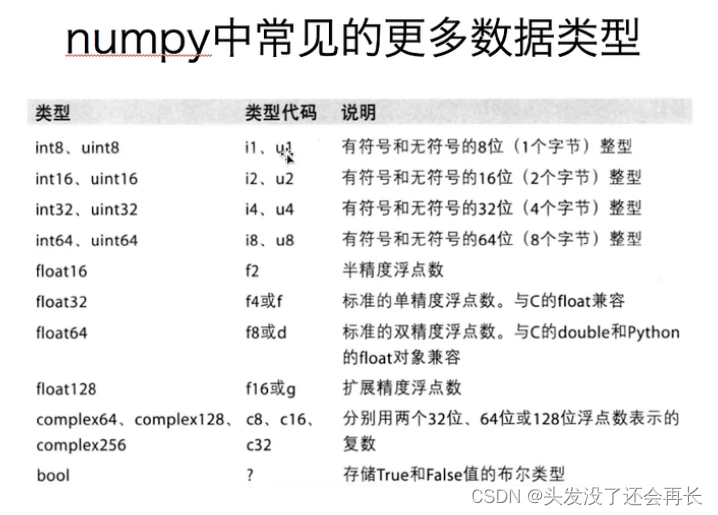
Numpy——1.数组的创建
![[neo4j] common operations of neo4j cypher and py2neo](/img/ff/8576d5784fcfa474eb1c0acd8a8065.jpg)
[neo4j] common operations of neo4j cypher and py2neo
随机推荐
Idea push project to code cloud
Simple use of timeunit
Nombre - 1. Création de tableaux
Clickhouse database installation deployment and remote IP access
Ue5 hot update - remote server automatic download and version detection (simplehotupdate)
Rename directory in C [closed] - renaming a directory in C [closed]
II Simple NSIS installation package
I 用c l 栈与队列的相互实现
Play with grpc - go deep into concepts and principles
Simple operation of nixie tube (keil5)
The mutual realization of C L stack and queue in I
editplus
Rough notes of C language (1)
QT's excellent articles
大学生活的自我总结-大一
static的作用
[idea] common shortcut keys
Esmini longspeedaction modification
Eclipse project recompile, clear cache
P3D gauge size problem