当前位置:网站首页>从39个kaggle竞赛中总结出来的图像分割的Tips和Tricks
从39个kaggle竞赛中总结出来的图像分割的Tips和Tricks
2022-07-05 12:33:00 【智源社区】
作者参加了39个Kaggle比赛,按照整个比赛的顺序,总结了赛前数据的处理,模型的训练,以及后处理等可以助力大家的tips和tricks,非常多的技巧和经验,现在全部分享给大家。

想象一下,如果你能得到所有的tips和tricks,你需要去参加一个Kaggle比赛。我已经超过39个Kaggle比赛,包括:
- Data Science Bowl 2017 – $1,000,000
- Intel & MobileODT Cervical Cancer Screening – $100,000
- 2018 Data Science Bowl – $100,000
- Airbus Ship Detection Challenge – $60,000
- Planet: Understanding the Amazon from Space – $60,000
- APTOS 2019 Blindness Detection – $50,000
- Human Protein Atlas Image Classification – $37,000
- SIIM-ACR Pneumothorax Segmentation – $30,000
- Inclusive Images Challenge – $25,000
现在把这些知识都挖出来给你们!
外部数据
- 使用 LUng Node Analysis Grand Challenge 数据,因为这个数据集包含了来自放射学的标注细节。
- 使用 LIDC-IDRI 数据,因为它具有找到了肿瘤的所有放射学的描述。
- 使用Flickr CC,维基百科通用数据集
- 使用Human Protein Atlas Dataset
- 使用IDRiD数据集
数据探索和直觉
- 使用0.5的阈值对3D分割进行聚类
- 确认在训练集和测试集的标签分布上有没有不一样的地方
预处理
- 使用DoG(Difference of Gaussian)方法进行blob检测,使用skimage中的方法。
- 使用基于patch的输入进行训练,为了减少训练时间。
- 使用cudf加载数据,不要用Pandas,因为读数据更快。
- 确保所有的图像具有相同的方向。
- 在进行直方图均衡化的时候,使用对比度限制。
- 使用OpenCV进行通用的图像预处理。
- 使用自动化主动学习,添加手工标注。
- 将所有的图像缩放成相同的分辨率,可以使用相同的模型来扫描不同的厚度。
- 将扫描图像归一化为3D的numpy数组。
- 对单张图像使用暗通道先验方法进行图像去雾。
- 将所有图像转化成Hounsfield单位(放射学中的概念)。
- 使用RGBY的匹配系数来找到冗余的图像。
- 开发一个采样器,让标签更加的均衡。
- 对测试图像打伪标签来提升分数。
- 将图像/Mask降采样到320x480。
- 直方图均衡化(CLAHE)的时候使用kernel size为32×32
- 将DCM转化为PNG。
- 当有冗余图像的时候,为每个图像计算md5 hash值。
数据增强
- 使用 albumentations 进行数据增强。
- 使用随机90度旋转。
- 使用水平翻转,上下翻转。
- 可以尝试较大的几何变换:弹性变换,仿射变换,样条仿射变换,枕形畸变。
- 使用随机HSV。
- 使用loss-less增强来进行泛化,防止有用的图像信息出现大的loss。
- 应用channel shuffling。
- 基于类别的频率进行数据增强。
- 使用高斯噪声。
- 对3D图像使用lossless重排来进行数据增强。
- 0到45度随机旋转。
- 从0.8到1.2随机缩放。
- 亮度变换。
- 随机变化hue和饱和度。
- 使用D4:https://en.wikipedia.org/wiki/Dihedral_group增强。
- 在进行直方图均衡化的时候使用对比度限制。
- 使用AutoAugment:https://arxiv.org/pdf/1805.09501.pdf增强策略。
模型
结构
- 使用U-net作为基础结构,并调整以适应3D的输入。
- 使用自动化主动学习并添加人工标注。
- 使用inception-ResNet v2 architecture结构使用不同的感受野训练特征。
- 使用Siamese networks进行对抗训练。
- 使用_ResNet50_, Xception, Inception ResNet v2 x 5,最后一层用全连接。
- 使用global max-pooling layer,无论什么输入尺寸,返回固定长度的输出。
- 使用stacked dilated convolutions。
VoxelNet。
- 在LinkNet的跳跃连接中将相加替换为拼接和conv1x1。
- Generalized mean pooling。
- 使用224x224x3的输入,用Keras NASNetLarge从头训练模型。
- 使用3D卷积网络。
- 使用ResNet152作为预训练的特征提取器。
- 将ResNet的最后的全连接层替换为3个使用dropout的全连接层。
- 在decoder中使用转置卷积。
- 使用VGG作为基础结构。
- 使用C3D网络,使用adjusted receptive fields,在网络的最后使用64 unit bottleneck layer 。
- 使用带预训练权重的UNet类型的结构在8bit RGB输入图像上提升收敛性和二元分割的性能。
- 使用LinkNet,因为又快又省内存。
MASKRCNN
- BN-Inception
- Fast Point R-CNN
- Seresnext
- UNet and Deeplabv3
- Faster RCNN
- SENet154
- ResNet152
- NASNet-A-Large
- EfficientNetB4
- ResNet101
- GAPNet
- PNASNet-5-Large
- Densenet121
- AC-GAN
- XceptionNet (96), XceptionNet (299), Inception v3 (139), InceptionResNet v2 (299), DenseNet121 (224)
- AlbuNet (resnet34) from ternausnets
- SpaceNet
- Resnet50 from selim_sef SpaceNet 4
- SCSEUnet (seresnext50) from selim_sef SpaceNet 4
- A custom Unet and Linknet architecture
- FPNetResNet50 (5 folds)
- FPNetResNet101 (5 folds)
- FPNetResNet101 (7 folds with different seeds)
- PANetDilatedResNet34 (4 folds)
- PANetResNet50 (4 folds)
硬件设置
- Use of the AWS GPU instance p2.xlarge with a NVIDIA K80 GPU
- Pascal Titan-X GPU
- Use of 8 TITAN X GPUs
- 6 GPUs: 2_1080Ti + 4_1080
- Server with 8×NVIDIA Tesla P40, 256 GB RAM and 28 CPU cores
- Intel Core i7 5930k, 2×1080, 64 GB of RAM, 2x512GB SSD, 3TB HDD
- GCP 1x P100, 8x CPU, 15 GB RAM, SSD or 2x P100, 16x CPU, 30 GB RAM
- NVIDIA Tesla P100 GPU with 16GB of RAM
- Intel Core i7 5930k, 2×1080, 64 GB of RAM, 2x512GB SSD, 3TB HDD
- 980Ti GPU, 2600k CPU, and 14GB RAM
损失函数
- Dice Coefficient ,因为在不均衡数据上工作很好。
- Weighted boundary loss 目的是减少预测的分割和ground truth之间的距离。
- MultiLabelSoftMarginLoss 使用one-versus-all损失优化多标签。
- Balanced cross entropy (BCE) with logit loss 通过系数来分配正负样本的权重。
- Lovasz 基于sub-modular损失的convex Lovasz扩展来直接优化平均IoU损失。
- FocalLoss + Lovasz 将Focal loss和Lovasz losses相加得到。
- Arc margin loss 通过添加margin来最大化人脸类别的可分性。
- Npairs loss 计算y_true 和 y_pred之间的npairs损失。
- 将BCE和Dice loss组合起来。
- LSEP – 一种成对的排序损失,处处平滑因此容易优化。
- Center loss 同时学习每个类别的特征中心,并对距离特征中心距离太远的样本进行惩罚。
- Ring Loss 对标准的损失函数进行了增强,如Softmax。
- Hard triplet loss 训练网络进行特征嵌入,最大化不同类别之间的特征的距离。
- 1 + BCE – Dice 包含了BCE和DICE损失再加1。
- Binary cross-entropy – log(dice) 二元交叉熵减去dice loss的log。
- BCE, dice和focal 损失的组合。
- BCE + DICE - Dice损失通过计算平滑的dice系数得到。
- Focal loss with Gamma 2 标准交叉熵损失的升级。
- BCE + DICE + Focal – 3种损失相加。
- Active Contour Loss 加入了面积和尺寸信息,并集成到深度学习模型中。
- 1024 * BCE(results, masks) + BCE(cls, cls_target)
- Focal + kappa – Kappa是一种用于多类别分类的损失,这里和Focal loss相加。
- ArcFaceLoss — 用于人脸识别的Additive Angular Margin Loss。
- soft Dice trained on positives only – 使用预测概率的Soft Dice。
- 2.7 * BCE(pred_mask, gt_mask) + 0.9 * DICE(pred_mask, gt_mask) + 0.1 * BCE(pred_empty, gt_empty) 一种自定义损失。
- nn.SmoothL1Loss()。
- 使用Mean Squared Error objective function,在某些场景下比二元交叉熵损失好。
边栏推荐
- MySQL index (1)
- Acid transaction theory
- Two minutes will take you to quickly master the project structure, resources, dependencies and localization of flutter
- Deep discussion on the decoding of sent protocol
- ZABBIX 5.0 - LNMP environment compilation and installation
- How to recover the information server and how to recover the server data [easy to understand]
- Docker configures redis and redis clusters
- UNIX socket advanced learning diary - advanced i/o functions
- Average lookup length when hash table lookup fails
- MySQL installation, Windows version
猜你喜欢
Migrate data from Mysql to neo4j database
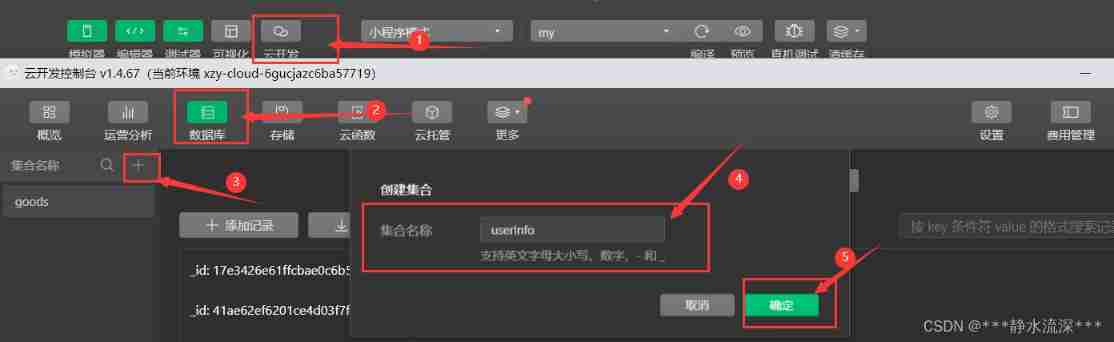
Simple production of wechat applet cloud development authorization login
Get the variable address of structure member in C language
Learn memory management of JVM 01 - first memory
A guide to threaded and asynchronous UI development in the "quick start fluent Development Series tutorials"
Redis highly available slice cluster
Resnet+attention project complete code learning
Anaconda creates a virtual environment and installs pytorch

Understand kotlin from the perspective of an architect
UNIX socket advanced learning diary -ipv4-ipv6 interoperability

随机推荐
Master-slave mode of redis cluster
Conversion du format de données GPS [facile à comprendre]
Just a coincidence? The mysterious technology of apple ios16 is actually the same as that of Chinese enterprises five years ago!
Average lookup length when hash table lookup fails
Distributed solution - Comprehensive decryption of distributed task scheduling platform - xxljob scheduling center cluster
How can beginners learn flutter efficiently?
Database connection pool & jdbctemplate
GPS数据格式转换[通俗易懂]
NPM install reports an error
Learn the garbage collector of JVM -- a brief introduction to Shenandoah collector
Detailed steps for upgrading window mysql5.5 to 5.7.36
How can labels/legends be added for all chart types in chart. js (chartjs.org)?
Why learn harmonyos and how to get started quickly?
C alarm design
Redis cluster configuration
byte2String、string2Byte
Pytoch monolayer bidirectional_ LSTM implements MNIST and fashionmnist data classification
A guide to threaded and asynchronous UI development in the "quick start fluent Development Series tutorials"
ZABBIX monitors mongodb templates and configuration operations
IPv6与IPv4的区别 网信办等三部推进IPv6规模部署