当前位置:网站首页>Cf464e the classic problem [shortest path, chairman tree]
Cf464e the classic problem [shortest path, chairman tree]
2022-07-06 03:44:00 【QuantAsk】
On the subject
Topic link :https://www.luogu.com.cn/problem/CF464E
The main idea of the topic
n n n A little bit m m m An undirected graph with edges , The first i i i The length of the strip is 2 x i 2^{x_i} 2xi, seek s s s To t t t One of the most short circuit .
1 ≤ n ≤ 1 0 5 , 0 ≤ m , x i ≤ 1 0 5 1\leq n\leq 10^5,0\leq m,x_i\leq 10^5 1≤n≤105,0≤m,xi≤105
Their thinking
shortest path , But maintain binary weights with the chairman tree .
One position plus 1 1 1 When we start with him, we put him back 1 1 1 All become 0 0 0, Then these 0 0 0 In front of the 1 1 1 Just fine .
Compare the size, and find the first different position from high to low , To achieve this function, we can maintain a h a s h hash hash.
Then reload these two operations and you can run directly dij \text{dij} dij Just fine .
Time complexity : O ( n log 2 n ) O(n\log^2 n) O(nlog2n)
There are also natural overflow hashes. Don't use them 2 2 2 Idempotent number 
code
#include<cstdio>
#include<cstring>
#include<algorithm>
#include<queue>
#define ull unsigned long long
using namespace std;
const int N=1e5+100,M=(N+10)<<6,P=1e9+7;
struct edge{
int to,next,w;
}a[N<<1];
int n,m,s,t,ans,tot,ls[N],rt[N],pre[N],c[N];
ull pw[N+10],one[N+10];bool v[N];
struct SegTree{
ull w[M];int cnt=1,ls[M],rs[M];
bool CMP(int x,int y,int L,int R){
if(w[x]==w[y])return 0;
if(L==R)return w[x]<w[y];
int mid=(L+R)>>1;
if(w[rs[x]]==w[rs[y]])return CMP(ls[x],ls[y],L,mid);
return CMP(rs[x],rs[y],mid+1,R);
}
int Make(int x,int &now,int L,int R,int st){
if(L>=st&&w[x]==one[R-L+1])
{
now=0;return 0;}
now=++cnt;w[now]=w[x];
ls[now]=ls[x];rs[now]=rs[x];
if(L==R){
w[now]=1;return L;}
int mid=(L+R)>>1;int flag=0;
if(L>=st){
if(w[ls[x]]==one[mid-L+1]){
ls[now]=0;
flag=Make(rs[x],rs[now],mid+1,R,st);
}
else flag=Make(ls[x],ls[now],L,mid,st);
}
else{
if(st<=mid)flag=Make(ls[x],ls[now],L,mid,st);
if(!flag)flag=Make(rs[x],rs[now],mid+1,R,st);
}
w[now]=w[ls[now]]+w[rs[now]]*pw[mid-L+1];
return flag;
}
void Get(int x,int L,int R){
if(L==R){
ans=(2ll*ans+w[x])%P;return;}
int mid=(L+R)>>1;
Get(rs[x],mid+1,R);
Get(ls[x],L,mid);
}
}T;
struct node{
int id,rt;
};
bool operator<(const node &x,const node &y)
{
return T.CMP(y.rt,x.rt,0,N);}
priority_queue<node> q;
void addl(int x,int y,int w){
a[++tot].to=y;
a[tot].next=ls[x];
ls[x]=tot;a[tot].w=w;
return;
}
void Dij(){
rt[s]=c[s]=1;q.push((node){
s,rt[s]});
while(!q.empty()){
int x=q.top().id;q.pop();
if(v[x])continue;v[x]=1;
if(x==t)return;
for(int i=ls[x];i;i=a[i].next){
int y=a[i].to;
if(v[y])continue;
int nr;T.Make(rt[x],nr,0,N,a[i].w);
if((!c[y])||T.CMP(nr,rt[y],0,N))
{
pre[y]=x;c[y]=c[x]+1;rt[y]=nr;q.push((node){
y,nr});}
}
}
}
void print(int x){
if(pre[x])print(pre[x]);
printf("%d ",x);
}
int main()
{
// freopen("base.in","r",stdin);
// freopen("base.out","w",stdout);
scanf("%d%d",&n,&m);pw[0]=1;
for(int i=1;i<N+10;i++)
pw[i]=pw[i-1]*131ull,one[i]=one[i-1]*131ull+1ull;
for(int i=1;i<=m;i++){
int x,y,v;
scanf("%d%d%d",&x,&y,&v);
if(x==16&&y==24&&m==197)
printf("%d ",v);
addl(x,y,v);addl(y,x,v);
}
scanf("%d%d",&s,&t);
Dij();
if(!c[t])return puts("-1")&0;
T.Get(rt[t],0,N);
printf("%d\n%d\n",ans,c[t]);
print(t);putchar('\n');
return 0;
}
边栏推荐
- 【SLAM】ORB-SLAM3解析——跟踪Track()(3)
- JS音乐在线播放插件vsPlayAudio.js
- Idea push rejected solution
- canvas切积木小游戏代码
- 数据分析——seaborn可视化(笔记自用)
- [rust notes] 18 macro
- three.js网页背景动画液态js特效
- Mysqldump data backup
- February 14, 2022 Daily: Google long article summarizes the experience of building four generations of TPU
- 记录一下逆向任务管理器的过程
猜你喜欢
给新人工程师组员的建议
Canvas cut blocks game code
1.16 - 校验码
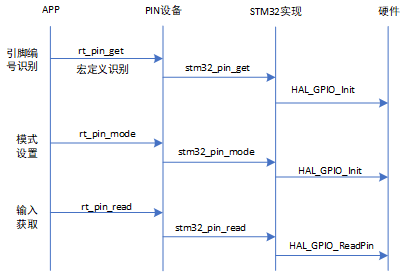
2.2 fonctionnement stm32 GPIO

JS音乐在线播放插件vsPlayAudio.js

The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
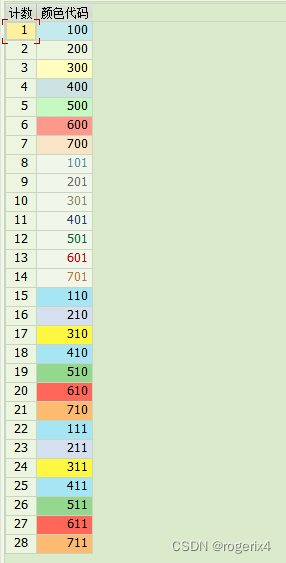
SAP ALV颜色代码对应颜色(整理)

深入刨析的指针(题解)
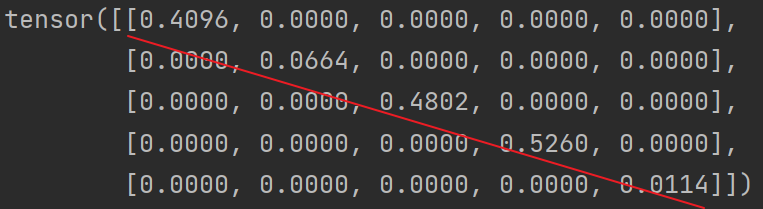
Pytoch foundation - (1) initialization of tensors
2.13 weekly report
随机推荐
canvas切积木小游戏代码
SAP ALV cell level set color
1.16 - 校验码
KS008基于SSM的新闻发布系统
3.1 detailed explanation of rtthread serial port device (V1)
SAP ALV color code corresponding color (finishing)
【Qt5】Qt QWidget立刻出现并消失
mysql关于自增长增长问题
2.2 STM32 GPIO操作
Introduction to data types in MySQL
施努卡:什么是视觉定位系统 视觉系统如何定位
Pytorch load data
遥感图像超分辨重建综述
【SLAM】lidar-camera外参标定(港大MarsLab)无需二维码标定板
潘多拉 IOT 开发板学习(HAL 库)—— 实验9 PWM输出实验(学习笔记)
A brief introduction to symbols and link libraries in C language
阿里测试师用UI自动化测试实现元素定位
C language judgment, ternary operation and switch statement usage
蓝色样式商城网站页脚代码
Differential GPS RTK thousand search