当前位置:网站首页>[dry goods] cycle slip detection of suggestions to improve the fixed rate of RTK ambiguity
[dry goods] cycle slip detection of suggestions to improve the fixed rate of RTK ambiguity
2022-07-06 12:53:00 【Proletarians】
In the previous introduction , adopt 5 Step analysis , Gradually improved RTK Fuzziness fixed rate and positioning accuracy . If you follow the configuration in the previous chapter , Test no ok Words , Then I can say for sure that it is caused by poor data quality . When using the configuration in the previous chapter for newly collected data , The effect is not very good , Now let's introduce the specific situation .
The data I released this time is rover Of ubx and base Of rtcm, Use rtkconv Transformation format , Reuse rtkpost Handle , There should be the following problems :(1) choice GPS/BDS,BDS The satellite is not in use ;(2) If BDS If satellites are available , You will find an increase BDS In the case of satellites , The fuzziness fixed rate becomes lower .
For the problems that arise , We must ask ourselves ,
1) What's the problem ?
2) What is the cause of the problem ?
3) How to solve this problem ?
Aiming at problems (1), Can pass trace open level3 Find out bds Ephemeris does not exist , Debug and check the ephemeris file , Find out BDS There are satellite ephemeris ,1h Updated once , B: no problem! , It seems that the problem is not in the ephemeris . although BDS Many satellites , however base and rover Co vision BDS satellite , Then combine the ephemeris file , You will find that only three satellites are available ,C09 C13 C16, Continue to check zdres, Let me find the problem ,BDS Satellite f1 The carrier and pseudo range observations of do not exist , Ran out f2 Array , stay o Put 2 Change to 1 That's it , therefore rtkconv When converting data, there is bug Of , There is no time to check , Also simple , Go directly to the corresponding app Check the folder .
Aiming at problems (2), It needs to be analyzed slowly .
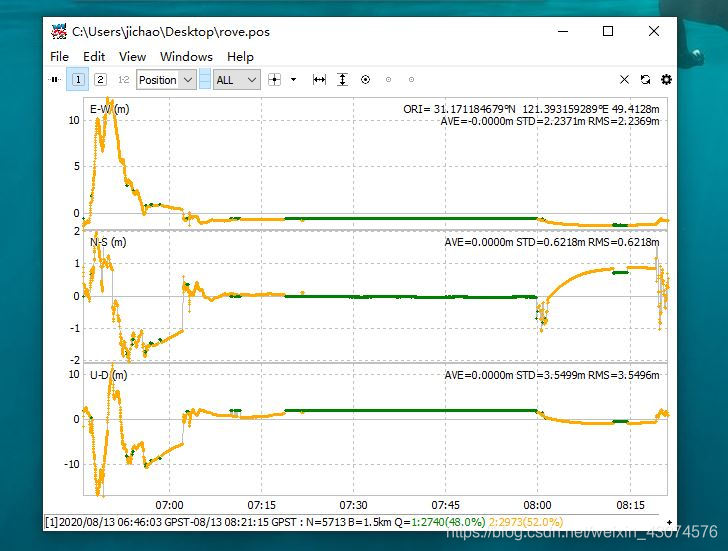
step1: Suppose the question 1 If there is no solution , In fact, it means running a single GPS, See what the result looks like 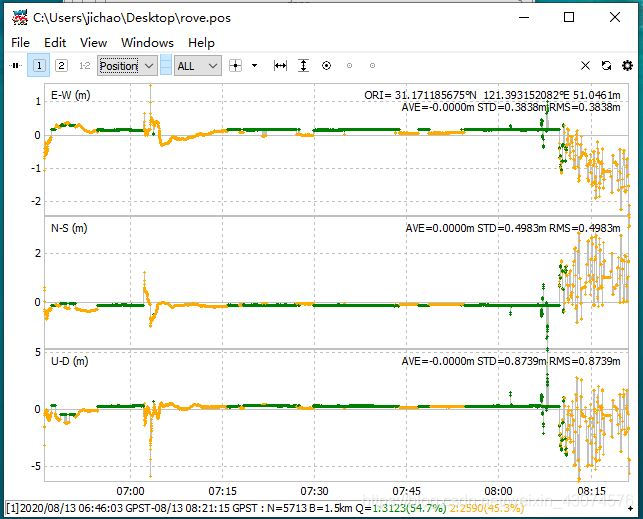
You can see from the above picture that , Observe the arc 8:00 in the future “ Jump about ”, Generally, this situation is satellite snr Jitter caused by , Let's take a look at the details rover Of G18 satellite .
step2: Here is G18 Of snr, You can see the process of going to the stars , The height angle is slowly increasing , Disable first G18, See what happens .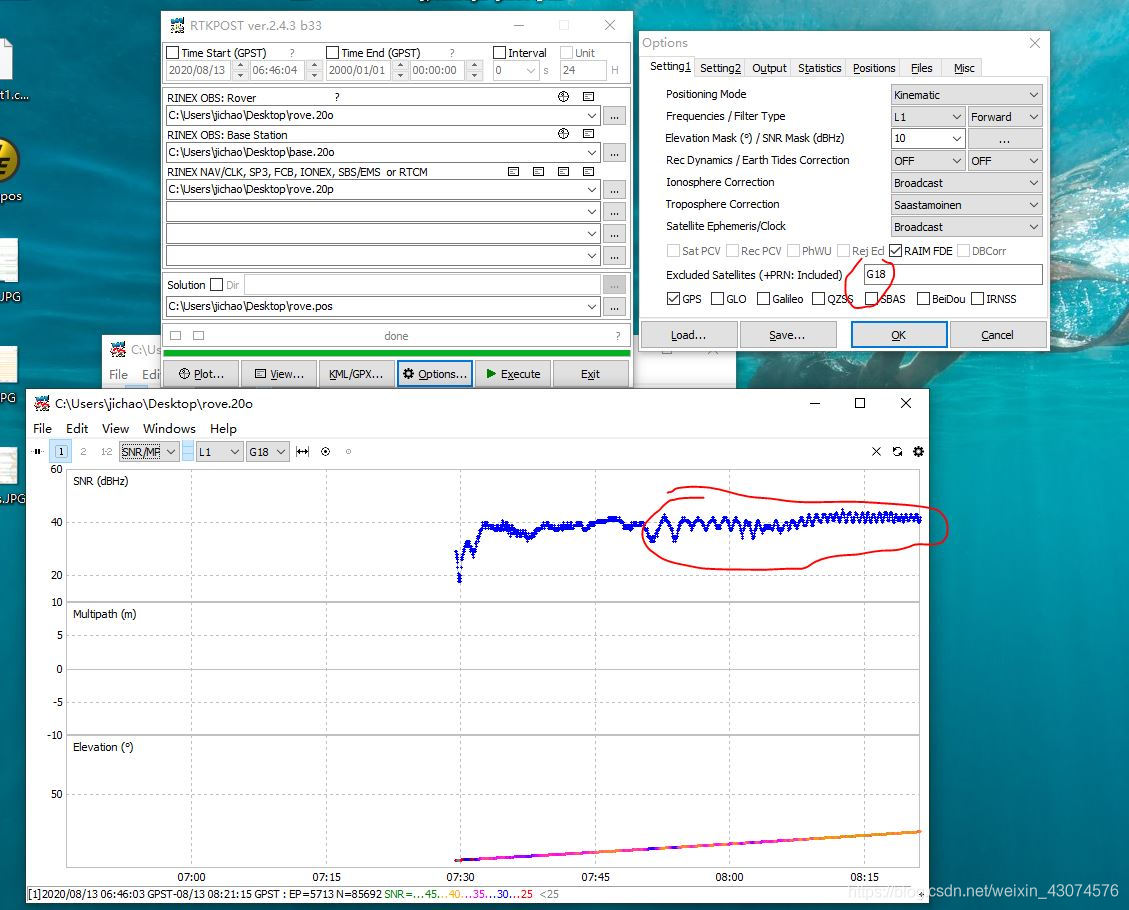
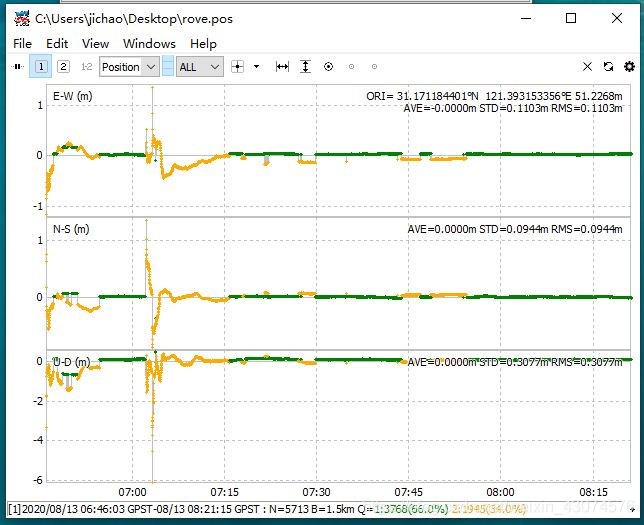
Compare the blur fixing rate before and after disabling , There is room for improvement , The specific value is not written .
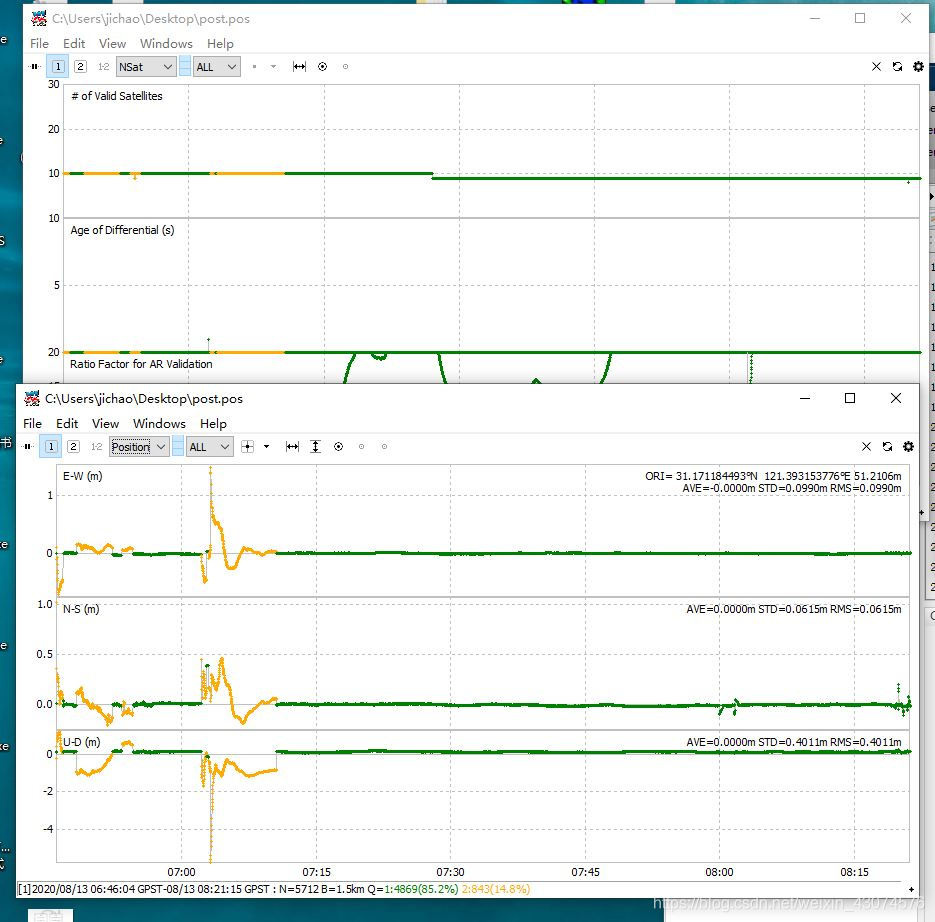
step3: At this time, add Beidou System , The configuration and results are as follows 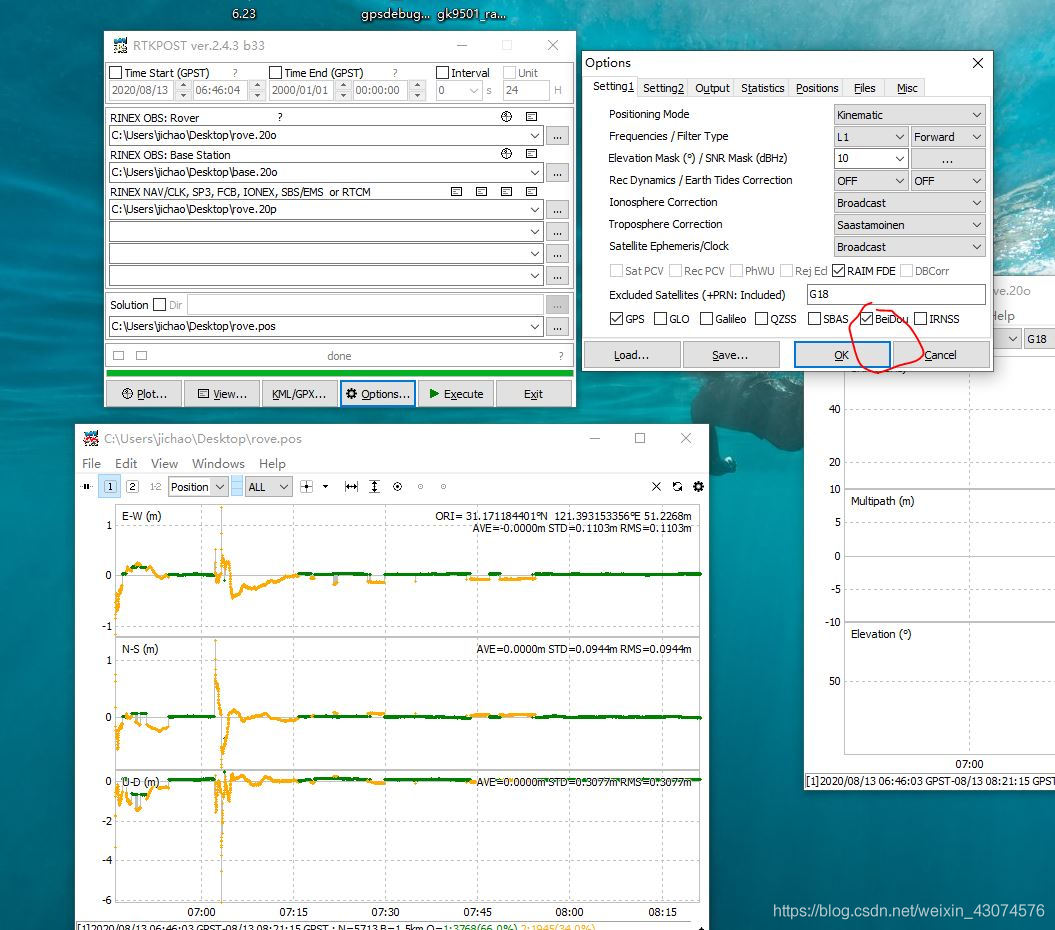
Plus Beidou satellite , Our results are getting worse . What's the reason ? First of all, there is a problem with the data quality , I still add the Doppler of the current epoch to the carrier wave , Use matlab mapping , Find out 3 The data quality of Beidou satellite is unstable , It's good when it's good , When it's bad, it's not ordinary , It's like when you receive a gift gf And quarrel gf. The specific method has been described in the previous chapter , I won't go into that . I want to use it when the data quality is good , I give it up when the quality is bad , Um. , At this time, Zhou Tiao detection came on , The specific code is in udbias in , I will directly release screenshots and results of my code changes 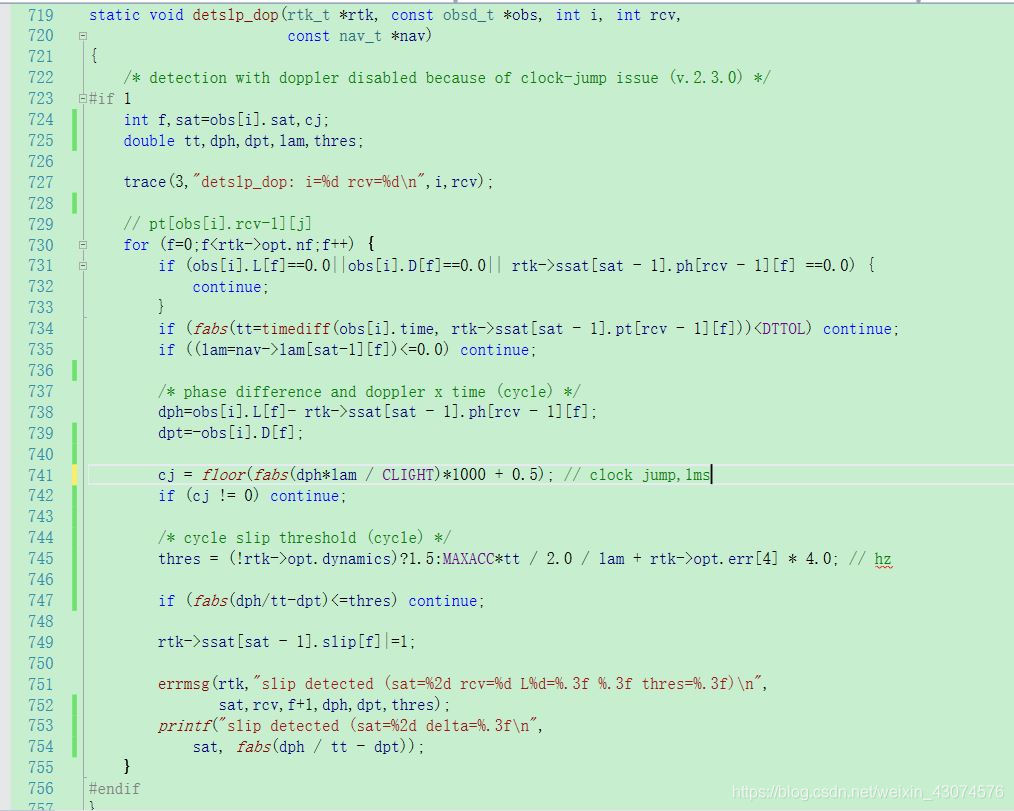
This function was originally disabled , Because the clock jumps , Just recognize the clock jump , The receiver I use I know the magnitude of clock difference , Yes ,arm The carrier generated on the has a ambiguity bug It's caused by the clock jumping , I changed it ,1ms. That's easy , Click click click , Changes can be used , The result has also been greatly improved . Of course, 14% The ambiguity of is not fixed , I'm still debug, First release the Chihiro base station o file , Just know that a certain epoch suddenly fix change float The reason why the .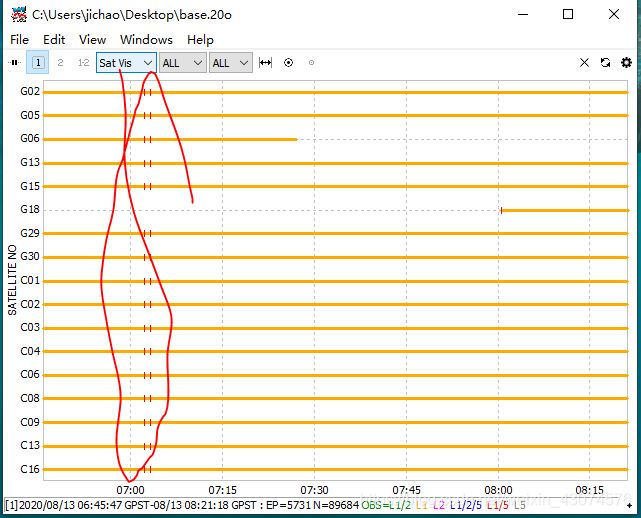
Simultaneous cycle jump !!!
So what I want to check is 7:00 The reason that was not fixed before , If it's solved , Just add .
----------------------- Split line ----------------------
Updated on 202009024
I directly changed the data , link :https://pan.baidu.com/s/1PCnWLcl43JmkNAeNicA1Yw
Extraction code :2r0h
stay rtklib in , The initial value of Kalman filter is calculated from a single point , Then we can also directly use the solution obtained in the previous epoch as the initial value of the Kalman filter in the current epoch , stay udpos Just change it in , Release the result graph 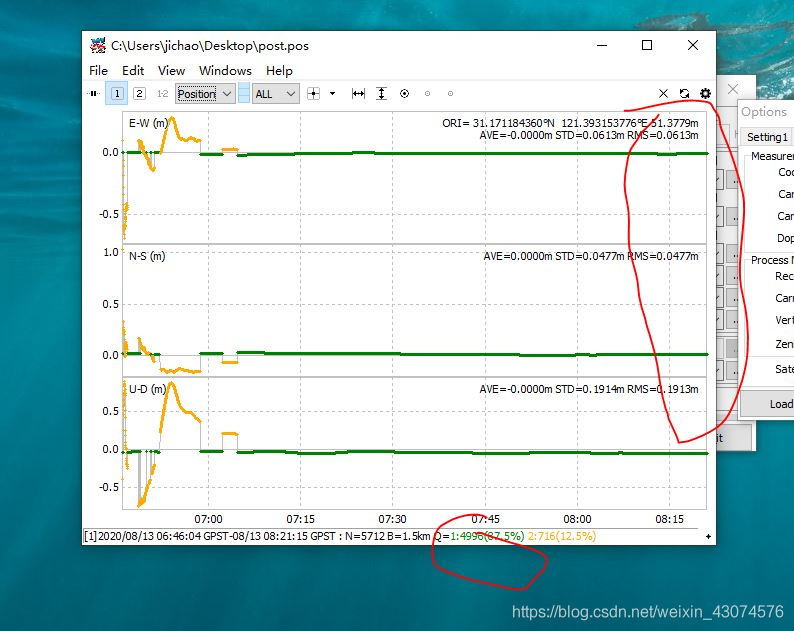
Is there any improvement , Ha ha ha
边栏推荐
- Unity scene jump and exit
- (the first set of course design) sub task 1-5 317 (100 points) (dijkstra: heavy edge self loop)
- Unity3d camera, the keyboard controls the front and rear left and right up and down movement, and the mouse controls the rotation, zoom in and out
- Teach you to release a DeNO module hand in hand
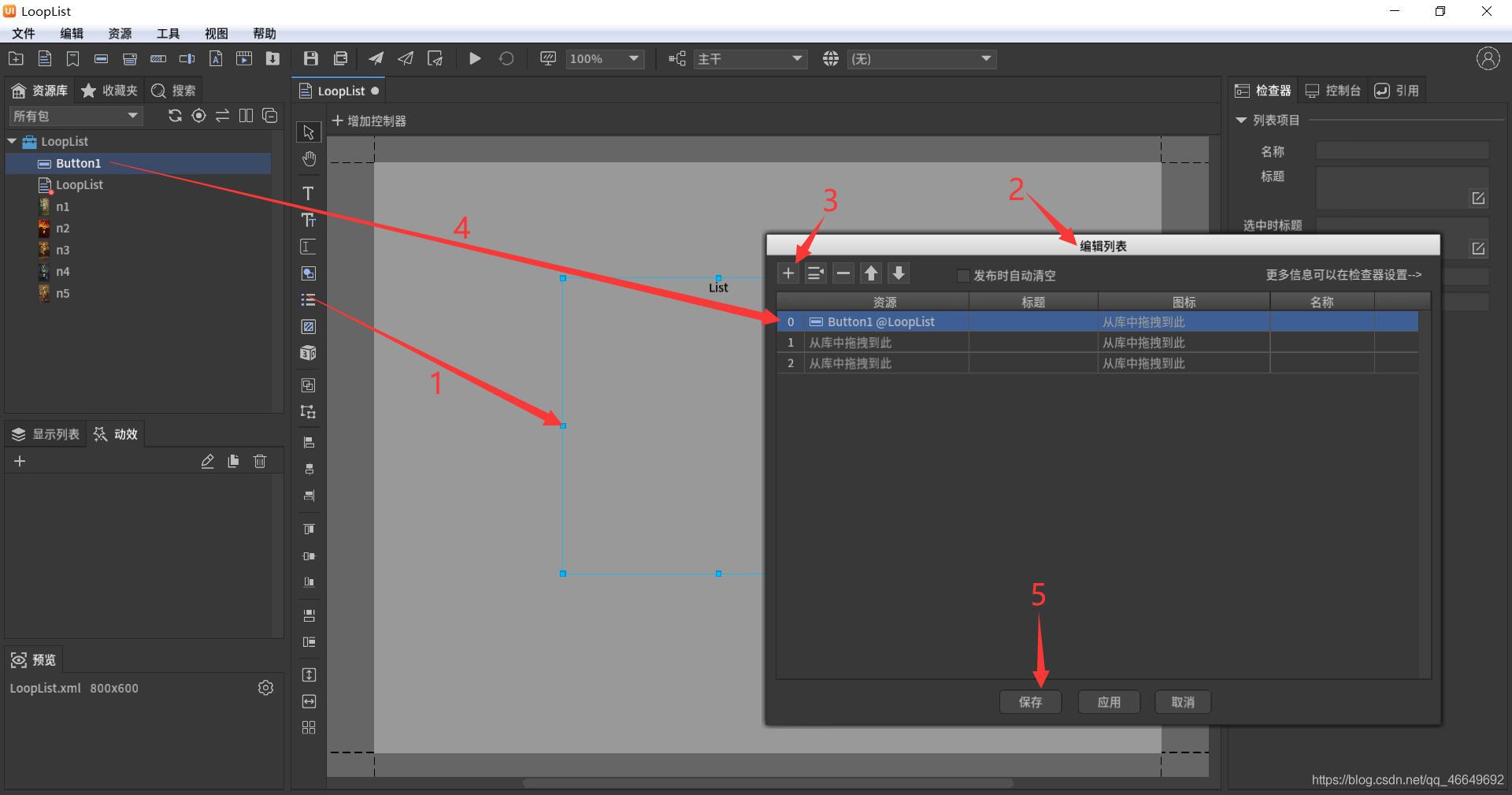
- FairyGUI循環列錶
- wsl常用命令
- Database course design: college educational administration management system (including code)
- The service robots that have been hyped by capital and the Winter Olympics are not just a flash in the pan
- [algorithm] sword finger offer2 golang interview question 9: subarray with product less than k
- [leetcode15] sum of three numbers
猜你喜欢
![[算法] 剑指offer2 golang 面试题4:只出现一次的数字](/img/f7/23ffc81ec8e9161c15d863c1a67916.png)


随机推荐
JUC forkjoin and completable future
MySQL shutdown is slow
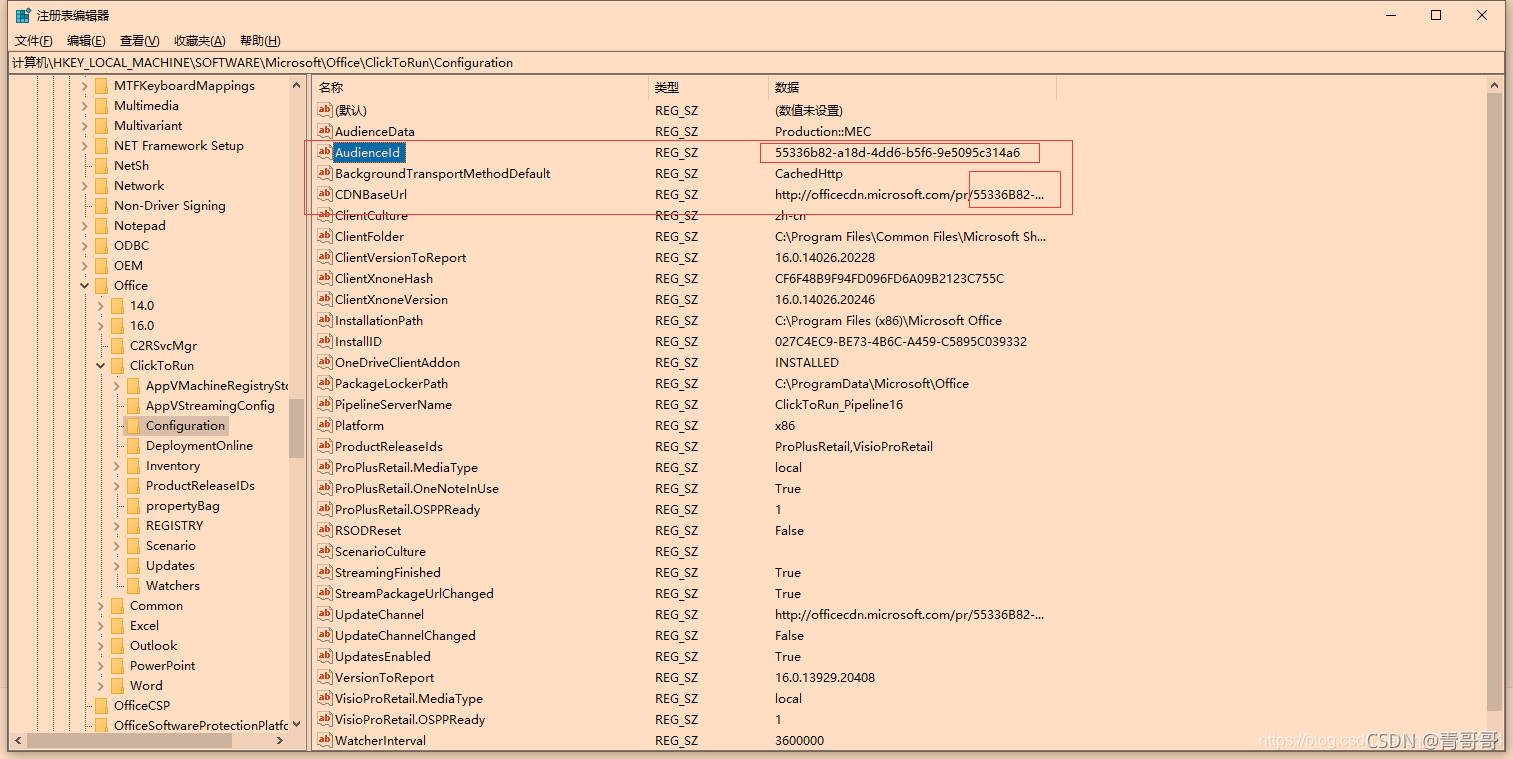
Office prompts that your license is not genuine pop-up box solution
VLSM variable length subnet mask partition tips
Get the position of the nth occurrence of the string
[leetcode15] sum of three numbers
What are the functions and features of helm or terrain
微信小程序开发心得
Special palindromes of daily practice of Blue Bridge Cup
PRIDE-PPPAR源码解析
Lock wait timeout exceeded try restarting transaction
dosbox第一次使用
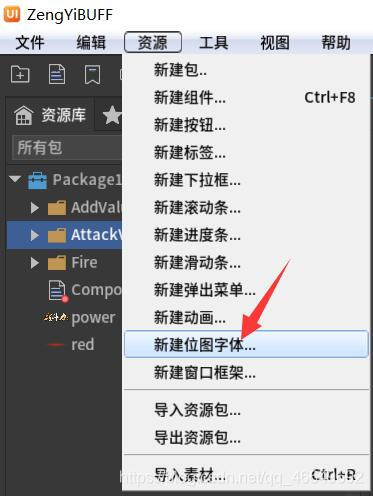
Affichage du changement de valeur du Buff de gain de l'interface graphique de défaillance
FairyGUI摇杆
NovAtel 板卡OEM617D配置步骤记录
Itext 7 生成PDF总结
【GNSS数据处理】赫尔默特(helmert)方差分量估计解析及代码实现
[算法] 剑指offer2 golang 面试题8:和大于或等于k的最短子数组
Unity3D摄像机,键盘控制前后左右上下移动,鼠标控制旋转、放缩
[algorithme] swordfinger offer2 golang question d'entrevue 2: addition binaire