当前位置:网站首页>Schnuka: machine vision positioning technology machine vision positioning principle
Schnuka: machine vision positioning technology machine vision positioning principle
2022-07-07 10:32:00 【Schnuka machine vision】
Now , We are already surrounded by all kinds of robots , Making 、 transport 、 Life and other fields play a very important role . For example, robot scooters , Sweeper robots, etc . And let these robots have a pair “ wisdom ” It is machine vision technology that eyes , Thanks to the planning and development of the robot industry , The application of machine vision technology has a very broad space .
Definition of machine vision Machine vision is a rapidly developing branch of artificial intelligence . In a nutshell , Machine vision is to use machines instead of human eyes to measure and judge . Machine vision is developed from the perspective of bionics , For example, the simulated eye collects images through visual sensors , After acquisition, the image processing system performs image processing and recognition .
Machine vision is mainly divided into three categories :
Monocular vision technology , That is to install a single camera for image acquisition , Generally, only two-dimensional images can be obtained . Monocular vision is widely used in the field of intelligent robots . However , Because this technology is limited by the problems of low image accuracy and data stability , Therefore, we need and ultrasound 、 Infrared and other types of sensors work together .
Binocular vision technology , It is a way of simulating human eyes to process environmental information , Collect one or more images with different perspectives from the outside through two cameras , So as to establish the three-dimensional coordinates of the measured object . Binocular vision technology can be roughly divided into robot arm vision control 、 Vision control of mobile robot 、 Unmanned aerial vehicles, unmanned ships, visual control and other directions .
Multi vision technology , It refers to the use of multiple cameras to reduce blind areas , Reduce the probability of error detection . This technology is mainly used for the motion measurement of objects . In the hand eye coordination of manipulator , Multi vision technology can overcome the blind area of object capture , Make the manipulator grasp more effectively . In the field of industrial robot assembly , Multi vision can also accurately identify and locate the measured object , And then improve the intelligence and positioning accuracy of the assembly robot .
Application of machine vision
The application of machine vision mainly includes detection and robot vision :
⒈ testing : It can also be divided into high-precision quantitative detection ( For example, the classification of cells in micrographs 、 Measurement of dimensions and positions of mechanical parts ) And qualitative or semi quantitative detection without measuring instrument ( For example, product appearance inspection 、 Component identification and positioning on the assembly line 、 Defect detection and assembly completeness detection ).
⒉ Robot vision : It is used to guide the operation and action of the robot in a large range , For example, pick up the workpiece from the disordered workpiece pile sent out by the hopper and place it on the conveyor belt or other equipment according to a certain orientation ( That is, the hopper picking problem ). As for small-scale operations and actions , It also needs the help of tactile sensing technology .
In addition, there is automatic optical inspection , Face recognition , Driverless car , Product quality grade classification , Automatic inspection of print quality , Character recognition , Texture recognition , Tracking location . The application of machine vision technology has replaced manual sorting and express delivery , Greatly improved efficiency . besides , Machine vision technology can also make robots have 3D Visual ability , Rely on visual guidance 、 location , Clamp product . And in automobile manufacturing 、 Medical and other fields also use machine vision system for measurement and detection .
As industrial 4.0 Coming of age , Machine vision plays an increasingly important role in the field of Intelligent Manufacturing , How machine vision technology works 、 Why is it the right choice to realize process automation and quality improvement .
Machine vision technology , It is a subject involving artificial intelligence 、 Neurobiology 、 Psychophysics 、 Computer science 、 The image processing 、 Pattern recognition and many other fields of interdisciplinary . Machine vision mainly uses computer to simulate human visual function , Extract information from the images of objective things , To deal with and understand , It's finally used for actual testing 、 Measurement and control . The biggest feature of machine vision technology is its high speed 、 A lot of information 、 Multi function .
边栏推荐
- Using U2 net deep network to realize -- certificate photo generation program
- Study summary of postgraduate entrance examination in July
- Why is the reflection efficiency low?
- Application of OpenGL gllightfv function and related knowledge of light source
- 【HigherHRNet】 HigherHRNet 详解之 HigherHRNet的热图回归代码
- Prototype and prototype chain
- Programming features of ISP, IAP, ICP, JTAG and SWD
- 南航 PA3.1
- 基于HPC场景的集群任务调度系统LSF/SGE/Slurm/PBS
- Study summary of postgraduate entrance examination in August
猜你喜欢

P2788 数学1(math1)- 加减算式

使用U2-Net深层网络实现——证件照生成程序
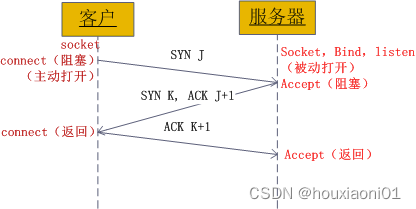
Socket communication principle and Practice
Pdf document signature Guide
Prototype object in ES6
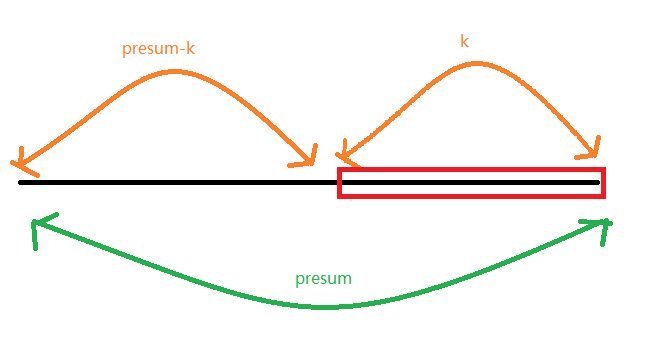
Leetcode-560: subarray with sum K
1323:【例6.5】活动选择
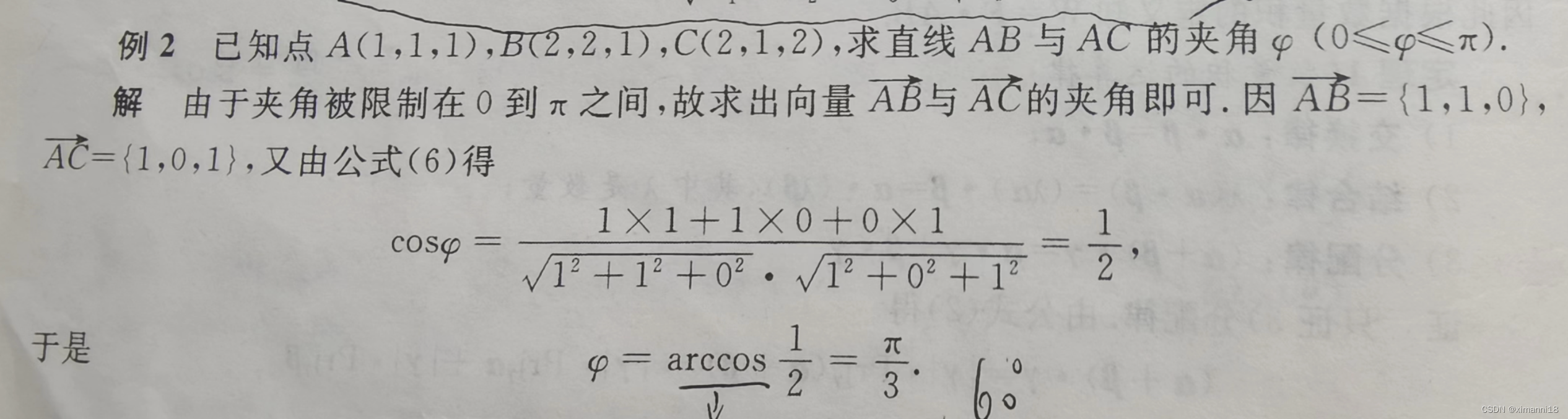
High number_ Chapter 1 space analytic geometry and vector algebra_ Quantity product of vectors

多线程-异步编排
php \n 换行无法输出
随机推荐
Study summary of postgraduate entrance examination in September
STM32 ADC and DMA
关于hzero-resource报错(groovy.lang.MissingPropertyException: No such property: weight for class)
【HigherHRNet】 HigherHRNet 详解之 HigherHRNet的热图回归代码
Multisim -- software related skills
Guid primary key
对存储过程进行加密和解密(SQL 2008/SQL 2012)
串口通讯继电器-modbus通信上位机调试软件工具项目开发案例
PDF文档签名指南
【二开】【JeecgBoot】修改分页参数
Kotlin realizes wechat interface switching (fragment exercise)
电表远程抄表拉合闸操作命令指令
Smart city construction based on GIS 3D visualization technology
Kotlin实现微信界面切换(Fragment练习)
Study summary of postgraduate entrance examination in November
P1031 [NOIP2002 提高组] 均分纸牌
MCU is the most popular science (ten thousand words summary, worth collecting)
The mobile terminal automatically adjusts the page content and font size by setting rem
嵌入式工程师如何提高工作效率
How embedded engineers improve work efficiency