当前位置:网站首页>Using GEE plug-in in QGIS
Using GEE plug-in in QGIS
2022-07-05 07:15:00 【RS&Hydrology】
1. stay QGIS Middle configuration GEE plug-in unit
(1) stay QGIS Install in software :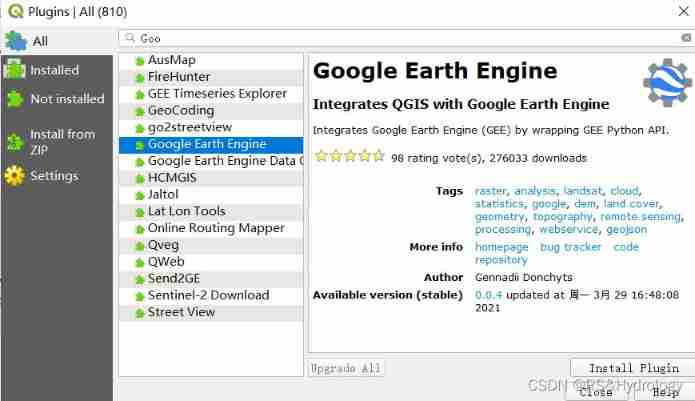
(2) Install plug-ins locally :
Installation website :https://plugins.qgis.org/plugins/ee_plugin/
After downloading , stay QGIS Install in software :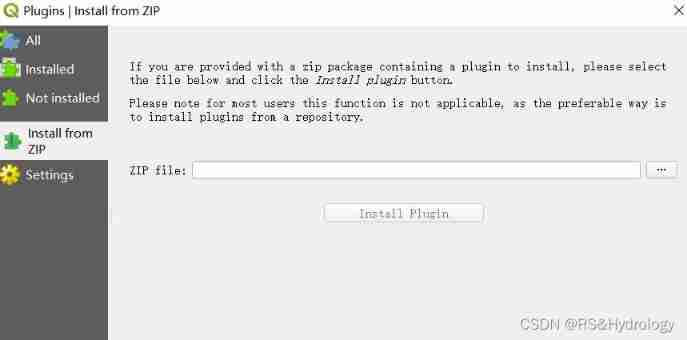
Installation successful :
Test error 1:

resolvent :
https://github.com/PANOimagen/batch_hillshader/issues/4
Need to re install the plug-in , Restart the software , Try a few more times , I don't know why .
Test error 2:
resolvent :
(2) Set up QGIS The Internet
Reference resources :https://zhuanlan.zhihu.com/p/148811140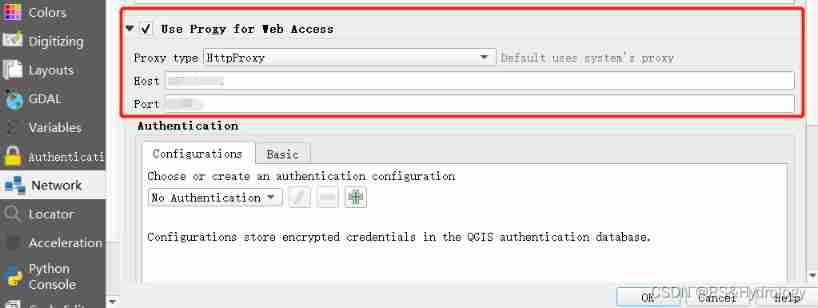
2. example
(1) Load background layer 
Pay attention to the need to install cloud plug-in unit .
(2) Load image data
import ee
from ee_plugin import Map
##load LC08 images/filter by date range/select bands RGB(432)
dataset = ee.ImageCollection('LANDSAT/LC08/C01/T1_TOA').filterDate('2017-01-01', '2017-12-31');
trueColor432 = dataset.select(['B4', 'B3', 'B2']);
trueColor432Vis = {
min: 0.0,
max: 0.4,
};
Map.setCenter(6.746, 46.529, 6);
Map.addLayer(trueColor432, trueColor432Vis, 'True Color (432)');
Reference material :
https://zhuanlan.zhihu.com/p/148811140
https://gee-community.github.io/qgis-earthengine-plugin/
QGIS Official documents :https://docs.qgis.org/testing/en/docs/user_manual/plugins/plugins.html#core-and-external-plugins
边栏推荐
- Three body goal management notes
- Brief description of inux camera (Mipi interface)
- DelayQueue延迟队列的使用和场景
- Target detection series - detailed explanation of the principle of fast r-cnn
- mingling
- ROS2——常用命令行(四)
- What does soda ash do?
- Interpretation of the earliest sketches - image translation work sketchygan
- Logical structure and physical structure
- Oracle code use
猜你喜欢
docker安装mysql并使用navicat连接
Ros2 - common command line (IV)
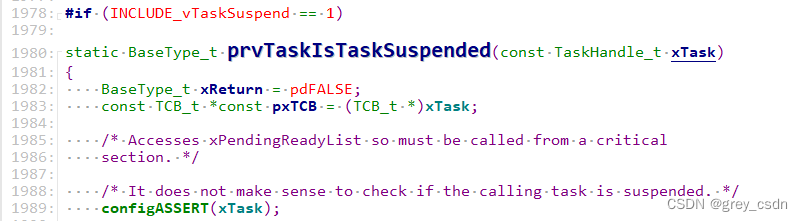
1290_ Implementation analysis of prvtaskistasksuspended() interface in FreeRTOS
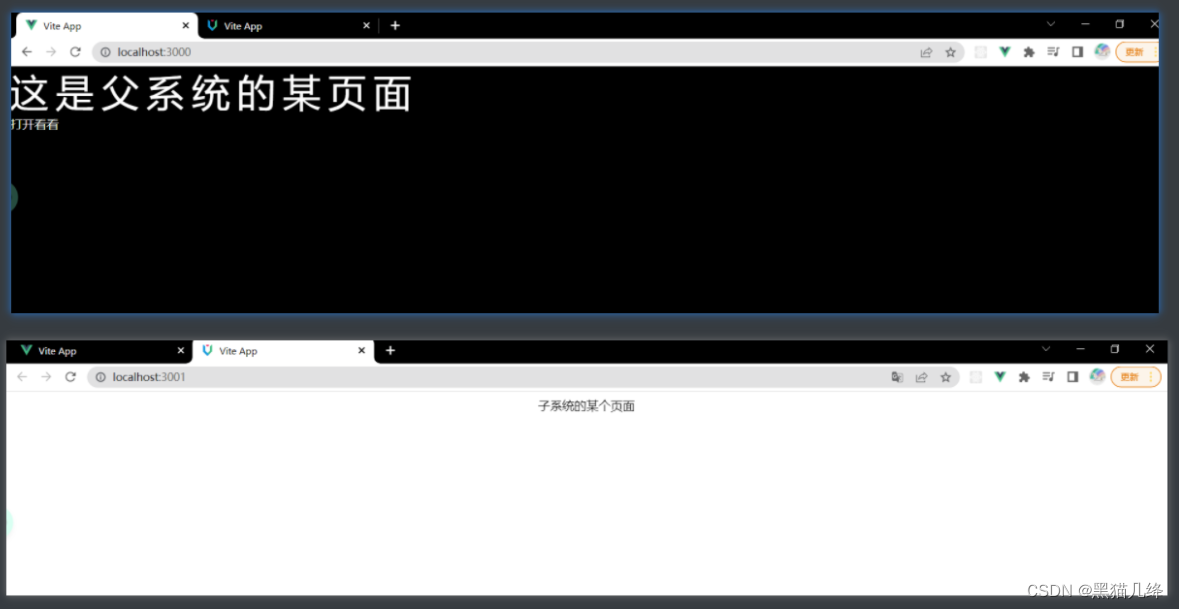
postmessage通信
【软件测试】04 -- 软件测试与软件开发
三体目标管理笔记
ROS2——Service服务(九)

SD_CMD_SEND_SHIFT_REGISTER
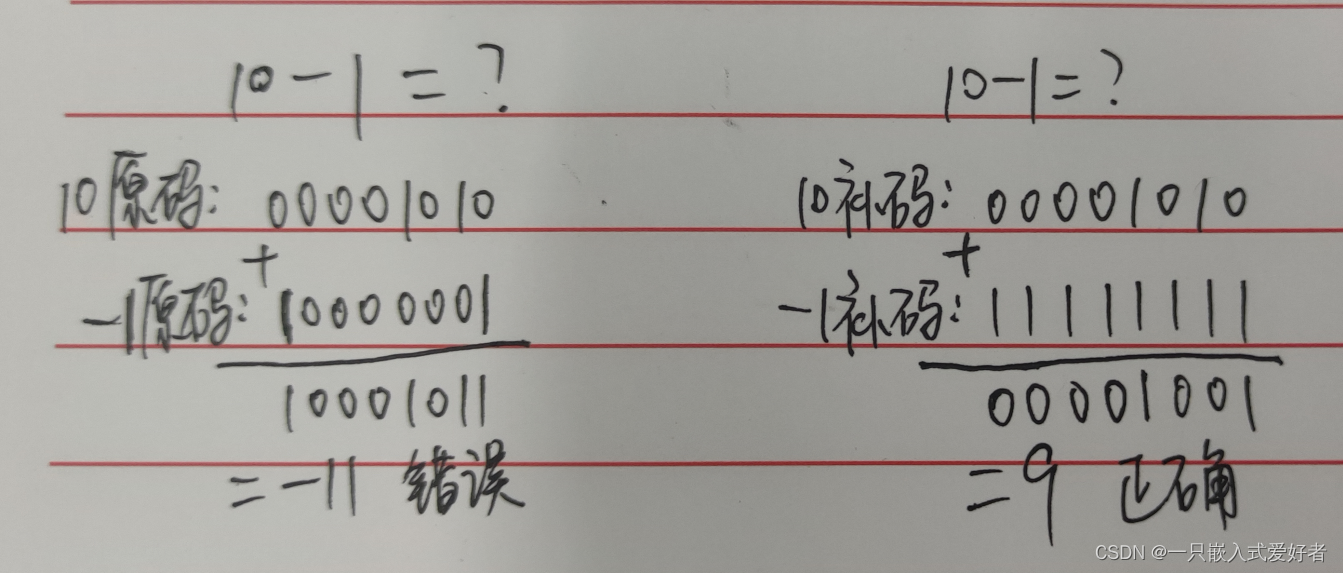
Negative number storage and type conversion in programs
你心目中的数据分析 Top 1 选 Pandas 还是选 SQL?
随机推荐
2022.06.27_每日一题
U-boot initialization and workflow analysis
C#学习笔记
ROS2——Service服务(九)
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
SD_CMD_RECEIVE_SHIFT_REGISTER
PHY drive commissioning - phy controller drive (II)
Ros2 - Service Service (IX)
Course learning accumulation ppt
Database SQL practice 4. Find the last of employees in all assigned departments_ Name and first_ name
Typescript get timestamp
二分查找(折半查找)
Ros2 - install ros2 (III)
氫氧化鈉是什麼?
SD_ CMD_ SEND_ SHIFT_ REGISTER
Ros2 - common command line (IV)
ROS2——常用命令行(四)
Mathematical analysis_ Notes_ Chapter 8: multiple integral
ROS2——ROS2对比ROS1(二)
Ros2 - function package (VI)