当前位置:网站首页>SD_ CMD_ SEND_ SHIFT_ REGISTER
SD_ CMD_ SEND_ SHIFT_ REGISTER
2022-07-05 07:07:00 【Eight four one one】
Catalog
1. Interface
- Normal clock reset soft reset
- eldest brother cmd_fsm The current status signal sent in_current_state
- Sent bit Count in_has_send_bit
- from sd The command signal from the card in_command_index、 Parameter signal in_command_argument
- And high-speed clock signals in_high_speed_clk, It will be different from ordinary
- Give to the sd Card command signal out_sd_cmd
- similar pad Of oen The signal out_cmd_dir Direction signal ,1 Issued by the representative sd card
input in_sd_clk;
input hrst_n;
input in_soft_reset;
//from fsm
input [2:0] in_current_state;
input [5:0] in_has_send_bit;
//from sd if
input [5:0] in_command_index;
input [31:0] in_command_argument;
input in_high_speed_clk;
output out_sd_cmd;
output out_cmd_dir;
2. Transmission direction out_cmd_dir
- Select the rising edge according to whether to use the high-speed clock cmd_dir_pos Or the falling edge cmd_dir_neg transmission
- cmd_dir_neg Than cmd_dir_pos Delay half a cycle
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
cmd_dir_pos <= 1'b0;
else if (in_current_state == `CMD_STATE_SEND)
cmd_dir_pos <= 1'b1;
else if (in_current_state == `CMD_STATE_STOP)
cmd_dir_pos <= 1'b0;
else if (in_current_state == `CMD_STATE_WAIT_RECEIVE)
cmd_dir_pos <= 1'b0;
end
always @(negedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
cmd_dir_neg <= 1'b0;
else
cmd_dir_neg <= cmd_dir_pos;
end
assign out_cmd_dir = in_high_speed_clk ? cmd_dir_pos : cmd_dir_neg;
3. Command generation cmd_for_send
- stay SEND According to the sent bit Count in_has_send_bit Give the corresponding command
- The format of the command is as follows : common 48 position need 6bit
- Use case Give each one separately bit At the time of the cmd_for_send assignment
- Only to argument( Parameters ), After that crc、 The end bit is not given
- If the combinational logic is not written completely, a latch will be generated latch, So let... At the beginning cmd_for_send by 0

always @(*) begin
cmd_for_send = 8'b0;
if (in_current_state == `CMD_STATE_SEND)
begin
case(in_has_send_bit)
6'b0,6'b1,6'b10,6'b11,6'b100,6'b101,6'b110,6'b111:
cmd_for_send = {
1'b0,1'b1,in_command_index};
6'b001000,6'b001001,6'b001010,6'b001011,6'b001100,6'b001101,6'b001110,6'b001111:
cmd_for_send = {
in_command_argument[31:24]};
6'b010000,6'b010001,6'b010010,6'b010011,6'b010100,6'b010101,6'b010110,6'b010111:
cmd_for_send = {
in_command_argument[23:16]};
6'b011000,6'b011001,6'b011010,6'b011011,6'b011100,6'b011101,6'b011110,6'b011111:
cmd_for_send = {
in_command_argument[15:8]};
6'b100000,6'b100001,6'b100010,6'b100011,6'b100100,6'b100101,6'b100110,6'b100111:
cmd_for_send = {
in_command_argument[7:0]};
endcase
end
end
4. Command output out_sd_cmd
- Select the rising edge output according to whether to use the high-speed clock sd_cmd_pos Or the falling edge output sd_cmd_neg
- sd_cmd_neg Than sd_cmd_pos It's still half a beat slow
- Because the board level path is long , If it's all combinatorial logic pos The establishment time may not be satisfied , Then moving for half a cycle may be enough
- Parallel to serial conversion with shift register ,in_has_send_bit[2:0] == 3’b0 No 8bit Enter case Take the data from the library
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
begin
sd_cmd_pos <= 1'b1;
shift_r <= 8'b0;
end
else if(!in_soft_reset)
begin
sd_cmd_pos <= 1'b1;
shift_r <= 8'b0;
end
else
begin
if(in_current_state == `CMD_STATE_SEND)
begin
if(in_has_send_bit[2:0] == 3'b0)
begin
case(in_has_send_bit)
6'b000000:
{
sd_cmd_pos,shift_r} <= {
1'b0,1'b1,in_command_index,1'b0};
6'b001000:
{
sd_cmd_pos,shift_r} <= {
in_command_argument[31:24],1'b0};
6'b010000:
{
sd_cmd_pos,shift_r} <= {
in_command_argument[23:16],1'b0};
6'b011000:
{
sd_cmd_pos,shift_r} <= {
in_command_argument[15:8],1'b0};
6'b100000:
{
sd_cmd_pos,shift_r} <= {
in_command_argument[7:0],1'b0};
6'b101000:
{
sd_cmd_pos,shift_r} <= {
crc_reg,1'b1,1'b0};
endcase
end
else
{
sd_cmd_pos,shift_r} <= {
shift_r,1'b0};
end
end
end
always @(negedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
sd_cmd_neg <= 1'b0;
else
sd_cmd_neg <= sd_cmd_pos;
end
assign out_sd_cmd = in_high_speed_clk ? sd_cmd_pos : sd_cmd_neg;
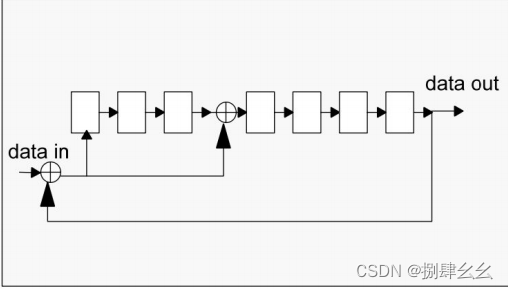
5. Calculation crc7
- Calculation crc7, And pass out_sd_cmd Send to sd card
- Calculation crc7 Methods :[0] and [3] These two bits need to be XOR , Other shifts are ok , See the picture below
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
crc_reg <= 7'b0;
else if (!in_soft_reset)
crc_reg <= 7'b0;
else
if((in_current_state == `CMD_STATE_SEND) &&
(in_has_send_bit >= 6'b0) &&
(in_has_send_bit < 6'd40))
begin
crc_reg[0] <= cmd_for_send[in_has_send_bit[2:0]]^crc_reg[6];
crc_reg[1] <= crc_reg[0];
crc_reg[2] <= crc_reg[1];
crc_reg[3] <= cmd_for_send[in_has_send_bit[2:0]]^crc_reg[6]^crc_reg[2];
crc_reg[4] <= crc_reg[3];
crc_reg[5] <= crc_reg[4];
crc_reg[6] <= crc_reg[5];
end
else
crc_reg <= 7'b0;
end
边栏推荐
- [algorithm post interview] interview questions of a small factory
- ROS2——node节点(七)
- 扫盲-以太网MII接口类型大全-MII、RMII、SMII、GMII、RGMII、SGMII、XGMII、XAUI、RXAUI
- [software testing] 06 -- basic process of software testing
- Rehabilitation type force deduction brush question notes D1
- 【软件测试】02 -- 软件缺陷管理
- 6-3 find the table length of the linked table
- [untitled]
- PHY drive commissioning - phy controller drive (II)
- 小米笔试真题一
猜你喜欢
SRE核心体系了解
Concurrent programming - how to interrupt / stop a running thread?
并发编程 — 如何中断/停止一个运行中的线程?
![[software testing] 03 -- overview of software testing](/img/1e/0b6458160e34e43f021ea4797de70a.jpg)
[software testing] 03 -- overview of software testing
. Net core stepping on the pit practice
Docker installs MySQL and uses Navicat to connect
Dameng database all

数学分析_笔记_第8章:重积分
Skywalking全部
Marvell 88e1515 PHY loopback mode test
随机推荐
Pycahrm reports an error: indentation error: unindent does not match any outer indentation
Sre core system understanding
Special training of C language array
逻辑结构与物理结构
解读最早的草图-图像翻译工作SketchyGAN
乐鑫面试流程
Ros2 - first acquaintance with ros2 (I)
Lexin interview process
Volcano resource reservation feature
Orin installs CUDA environment
PowerManagerService(一)— 初始化
[OBS] x264 Code: "buffer_size“
Powermanagerservice (I) - initialization
ROS2——常用命令行(四)
【软件测试】02 -- 软件缺陷管理
Dameng database all
. Net core stepping on the pit practice
PHY驱动调试之 --- MDIO/MDC接口22号和45号条款(一)
扫盲-以太网MII接口类型大全-MII、RMII、SMII、GMII、RGMII、SGMII、XGMII、XAUI、RXAUI
Cookie、Session、JWT、token四者间的区别与联系