当前位置:网站首页>Ros2 - first acquaintance with ros2 (I)
Ros2 - first acquaintance with ros2 (I)
2022-07-05 06:51:00 【Me and nano】
ROS2 operating system
List of articles
Preface
I studied in school ROS1, But as the ROS2 Gradually popularize ,ROS1 Of 1 Shortcomings appear , Taking advantage of summer vacation time , Let's learn ROS2.
One 、 The era of intelligent robots
The development of robots spans 70-80 years , Experienced three important periods .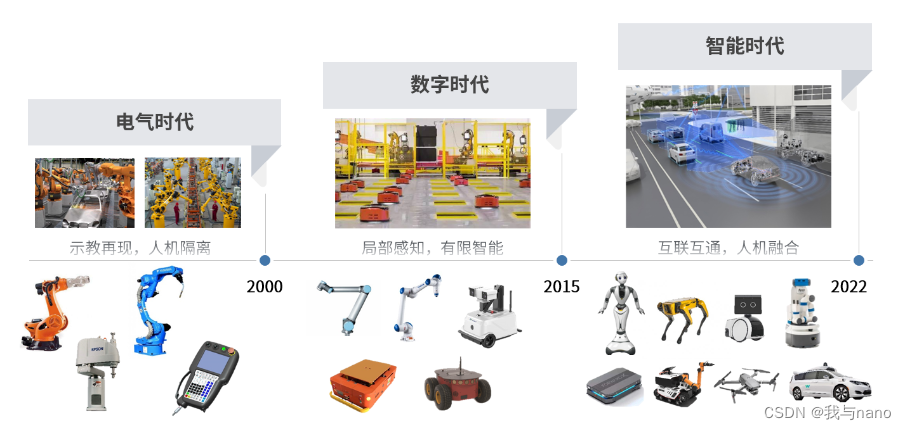
2000 Years ago , Robots are mainly used in industrial production , Commonly known as industrial robots , Controlled by the teaching pendant , Help factories release labor , At this time, robots do not have much intelligence , Perform actions completely according to human orders , Pay more attention to the driver at the electrical level 、 Servo motor 、 Reducer 、 Controllers and other devices , This is the electrical age of robots .
2000 After year , Computer and vision technology are gradually applied , The types of robots are constantly enriched , There is AGV、 Applications such as visual inspection , At this time, the robot sensors are more abundant , But there is still a lack of independent thinking process , Limited intelligence , Can only perceive the local environment , This is the digital age of robots , But this is also the eve of the robot era .
2015 Years later, , With the rapid development of artificial intelligence technology , Robots have become AI The best carrier of Technology , Home service robot 、 Feeding robot 、 Quadruped bionic robot dog 、 Applications such as autonomous vehicle have exploded , The era of intelligent robots officially kicked off .
Two 、ROS The birth of
The age of intelligence , Robots are evolving towards the highly intelligent direction of the whole scene , This poses a great challenge to robot development , Robot operating system ROS Applied .
For more and more complex intelligent robot systems , It's not something that one person or a team can do alone , How to develop robots efficiently , It is a very important problem on the technical level , In response to this question , A group of aspiring young people at Stanford University tried to give an answer , That is the robot operating system .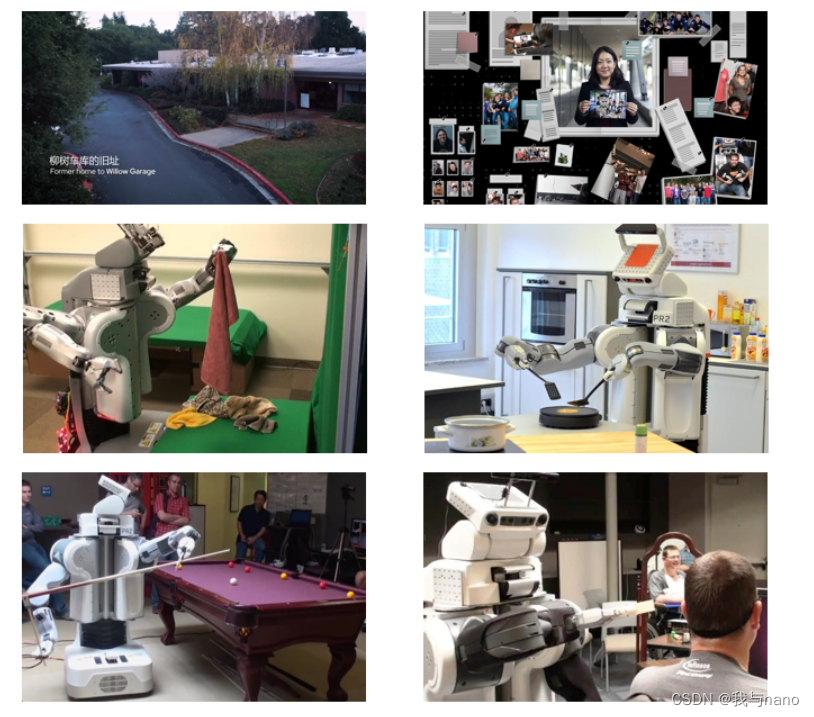
3、 ... and 、ROS The development of
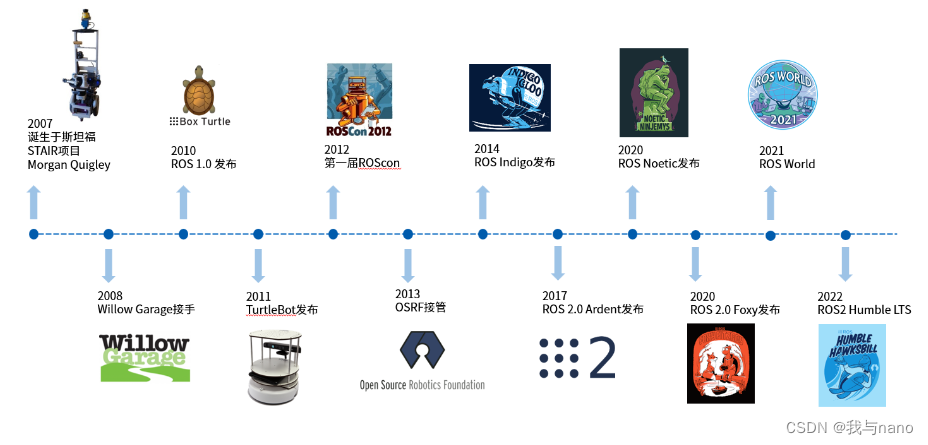
Go back to the beginning of the timeline ,ROS Our founding team originally only wanted to be a personal service robot , Never in my wildest dreams ,ROS Used by more and more robots , Limited by the limitations of the original design ,ROS And the problems of the government are gradually exposed . In order to really design an operating system suitable for all robots ,ROS2 stay 2017 Officially released at the end of the year , After years of iteration , We finally 2022 year 5 End of month , In the ROS2 The first long-term support version ——ROS2 Humble,ROS2 It's mature , We have also entered a new ROS2 Time .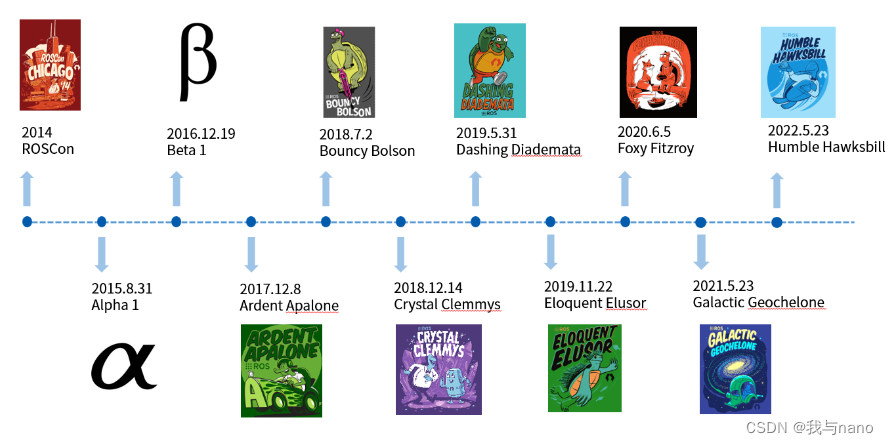
Four 、ROS Characteristics
ROS Carry with you “ Improve the reuse rate of robot software ” The goal of , Promote the rapid development and prosperity of the community , today ,ROS It has been widely used in the development of various robots , Whether it's a mechanical arm 、 Mobile robots 、 Underwater robots , Or a humanoid robot 、 Composite robots , You can see it all ROS The figure of ,ROS It has become a universal standard in the field of robotics .
Improve the reuse rate of robot software , The goal is simply not to rebuild the wheel .
5、 ... and 、ROS Our community
The community is ROS The core driving force of rapid development , What is community ? In fact, that is ROS Integration of relevant resources , such as wiki explain 、 Q & a website 、 Application source code 、 Forum discussions are all elements of the community .
ROS There are several important websites in the global community :
answers.ros.org, This is a ROS Q & a website , You can put forward any questions about ROS The problem of , Many developers around the world are happy to answer our questions ;
wiki.ros.org, This is a ROS Wikipedia , Recorded ROS Tutorials and the use of various function packs ;
discourse.ros.org, This is a ROS Forum , About ROS New developments can be published and viewed here , such as ROS The activities of 、 Release of new function packs, etc .
index.ros.org, yes ROS An index website of various resources ;
packages.ros.org, yes ROS Database stored in function package .
summary
Follow Gu Yue to finish learning ROS1, Every blog is to record your study life , Those who want to know more can go b Stand and watch Gu Yue's video explanation .
Fear of the infinite truth , One inch into an inch of joy .
边栏推荐
- 6-4 search by serial number of linked list
- Mutual transformation between two-dimensional array and sparse array (sparse matrix)
- Vant Weapp SwipeCell设置多个按钮
- Getting started with typescript
- Xavier CPU & GPU high load power consumption test
- 1. Create Oracle database manually
- 使用paping工具进行tcp端口连通性检测
- La redirection de l'applet Wechat ne déclenche pas onload
- Error: “MountVolume.SetUp failed for volume pvc 故障处理
- The route of wechat applet jumps again without triggering onload
猜你喜欢





随机推荐
Vscode editor
.net core踩坑实践
数学分析_笔记_第8章:重积分
Error: "mountvolume.setup failed for volume PVC fault handling
Using handler in a new thread
ROS2——node节点(七)
VLAN experiment
乐鑫面试流程
Log4qt usage of logbase in QT project
Xavier CPU & GPU 高负载功耗测试
The “mode“ argument must be integer. Received an instance of Object
数据库Mysql全部
[nvidia] CUDA_ VISIBLE_ DEVICES
Package webapp or H5 pages into apps
全局变量和静态变量的初始化
Vant weapp swippecell set multiple buttons
Integer to 8-bit binary explanation (including positive and negative numbers) scope of application -127~+127
Ros2 - node (VII)
Design specification for mobile folding screen
Written examination notes