当前位置:网站首页>docker安装mysql并使用navicat连接
docker安装mysql并使用navicat连接
2022-07-05 06:57:00 【Silence丶你的名字】
创建映射目录,我安装在用户目录下
mkdir ~/mysql
mkdir ~/mysql/conf
mkdir ~/mysql/logs
mkdir ~/mysql/data
分别执行以上命令,创建文件目录
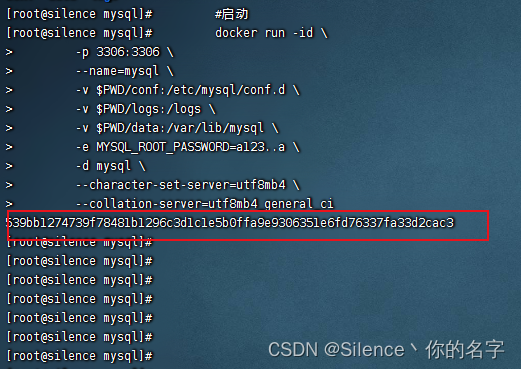
#启动 docker run -id \ -p 3306:3306 \ --name=mysql \ -v $PWD/conf:/etc/mysql/conf.d \ -v $PWD/logs:/logs \ -v $PWD/data:/var/lib/mysql \ -e MYSQL_ROOT_PASSWORD=123456 \ -d mysql \ --character-set-server=utf8mb4 \ --collation-server=utf8mb4_general_ci
# 说明
docker run 创建一个新的容器 , 同时运行这个容器 -p 3306:3306 设置端口映射 对外暴露的端口:容器端口 --name 容器启动后的名称 -v 卷挂载 容器外目录:容器内目录 –restart unless-stopped 容器重启策略 -e MYSQL_ROOT_PASSWORD=root 设置root用户的密码,容器启动后用于登录mysql \ shell 命令换行符 $PWD 当前用户目录
由于使用了$PWD 所以需要进入到mysql目录 cd ~/mysql 然后执行docker命令
查看容器 启动是否成功 docker ps

进入容器 docker exec -it mysql bash

登录msyql mysql -uroot -p123456
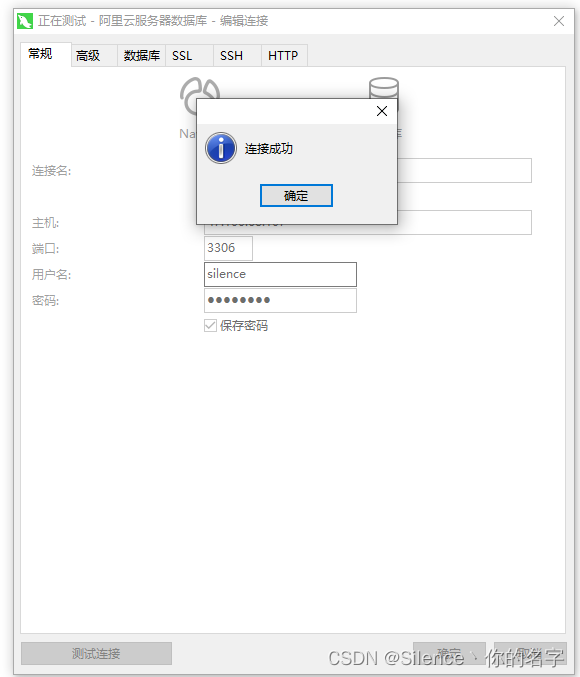
创建用户
CREATE USER 'silence'@'%' IDENTIFIED WITH mysql_native_password BY '123456';

授权用户远程登录
GRANT ALL PRIVILEGES ON *.* TO 'silence'@'%';

navicat 连接
边栏推荐
- Log4qt usage of logbase in QT project
- Use the Paping tool to detect TCP port connectivity
- 【软件测试】06 -- 软件测试的基本流程
- Marvell 88E1515 PHY loopback模式测试
- mysql设置触发器问题
- Technology blog learning website
- H5 embedded app adapts to dark mode
- Time is fast, please do more meaningful things
- Architecture
- The differences and connections among cookies, sessions, JWT, and tokens
猜你喜欢
Dameng database all
Page type
The “mode“ argument must be integer. Received an instance of Object
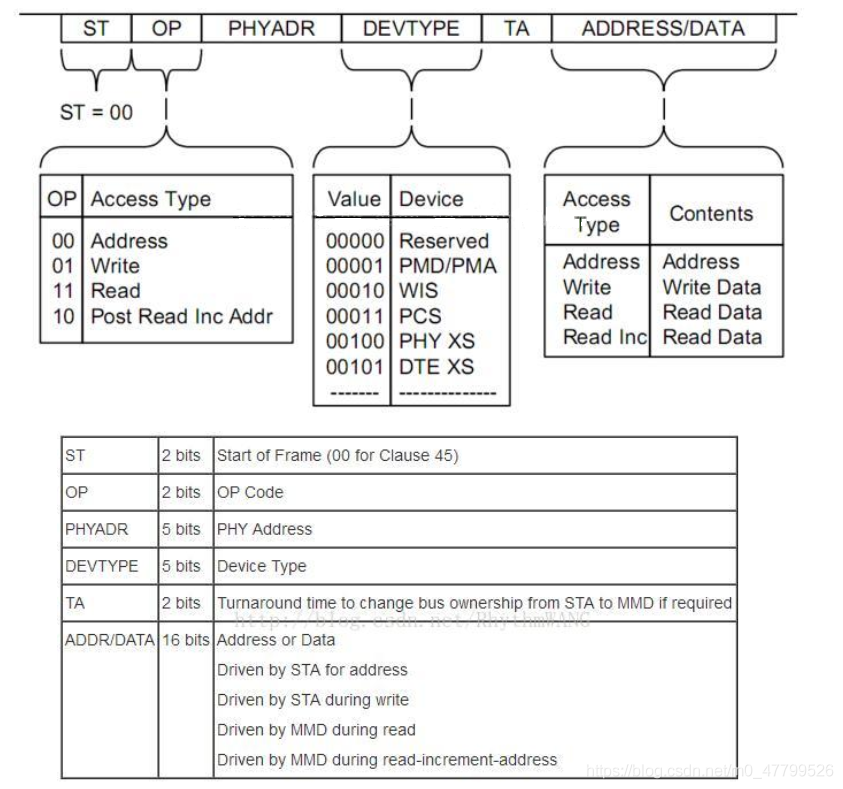
PHY驱动调试之 --- MDIO/MDC接口22号和45号条款(一)
Marvell 88e1515 PHY loopback mode test
Build a microservice cluster environment locally and learn to deploy automatically
Logical structure and physical structure

Log4qt usage of logbase in QT project
ROS2——配置开发环境(五)
postmessage通信
随机推荐
能量守恒和打造能量缺口
Financial risk control practice -- feature derivation based on time series
how to understand the “model independent.“
Instruction execution time
数据库Mysql全部
Preemption of CFS scheduling
全局变量和静态变量的初始化
Special training of C language array
扫盲-以太网MII接口类型大全-MII、RMII、SMII、GMII、RGMII、SGMII、XGMII、XAUI、RXAUI
Mutual transformation between two-dimensional array and sparse array (sparse matrix)
Error: "mountvolume.setup failed for volume PVC fault handling
【软件测试】02 -- 软件缺陷管理
ROS2——配置开发环境(五)
6-4 search by serial number of linked list
SOC_SD_CMD_FSM
睿智的目标检测59——Pytorch Focal loss详解与在YoloV4当中的实现
Huawei bracelet, how to add medicine reminder?
Use the Paping tool to detect TCP port connectivity
三体目标管理笔记
Get class files and attributes by reflection