当前位置:网站首页>Introduction to ins/gps integrated navigation type
Introduction to ins/gps integrated navigation type
2022-07-07 02:48:00 【Python Xiaobai (Xiaohei in the next stage)】
INS/GPS Introduction to integrated navigation type
Preface
Navigation technology provides users with the location of moving objects 、 Speed and attitude information . Common navigation methods include satellite navigation and inertial navigation .
Satellite navigation has high positioning accuracy 、 The area covers a wide range 、 The client has the advantages of low price and easy application , It has attracted much attention in the field of navigation , Become the most widely used navigation technology [1]. Although the satellite navigation system has high accuracy 、 all-weather 、 Continuous real-time positioning capability , However, its positioning performance is greatly affected by the environment , Such as in urban canyon 、 Tunnels and other places with serious signal blocking or interference , The accuracy of satellite navigation will be greatly reduced , Even the positioning solution fails . Inertial navigation technology is based on Newton's classical laws of mechanics , The real-time position of the object is obtained through the principle of track estimation [2]. Inertial navigation has strong ability to work independently 、 Not susceptible to external interference and other advantages , However, due to the error accumulation in the dead reckoning process , Therefore, the accuracy of inertial navigation is divergent with time , Unable to carry out long-term positioning work independently .
Satellite navigation and inertial navigation have natural complementary advantages , With the development of navigation technology , Strapdown inertial navigation (Strap-down Inertial Navigation System , SINS) And GPS (Global Positioning System ,GPS) Composed of SINS/GPS Integrated navigation system has become a research hotspot in the field , It can realize the complementary update of the two subsystems , Solve effectively GPS In case of loss of signal, the position cannot be determined and INS There is a problem of long-term accumulated error [3].
The core technology of integrated navigation system lies in the construction of state equation 、 Measurement equation construction and system fusion algorithm design .
Content
according to INS and GPS Different degrees of coupling ,INS/GPS The combination form of can be divided into loose combination (Loosely Coupled ,LC)、 Compact combination (Tightly Coupled ,TC) And deep combination or super tight combination (Ultra-tightly Coupled)[3].
Loose combination is based on GNSS Location and speed of solution , Simple structure 、 Mature technology 、 Easy to implement , And the accuracy is also high ; Compact combination based on GNSS Observation and measurement , Such as pseudo range and pseudo range rate , The construction is more complex than loose combination, but the effect is better ;
Deep combination , be based on GNSS The signal , Mainly by adjusting the structure of the receiver 、 Improve the performance of the receiver to achieve , The current technology is immature 、 It's hard to achieve .
Huang Fengzhao and others used pseudo distance ( Pseudo range change rate ) Residuals are used as observation information , Realized SINS/GPS Software and hardware design of pseudo range integrated navigation system , Both static and dynamic experiments have achieved good accuracy [9]. Chen Jiabin et al. Designed a weighted average tracking error estimator , It can effectively correct the code loop tracking error in pseudo range observation , The navigation accuracy of the system has been significantly improved [10].
PSINS in 19 For the code of dimensional integrated navigation, please refer to
function [avp, xkpk, zkrk, sk, ins, kf] = sinsgps(imu, gps, ins, davp, imuerr, lever, dT, rk, Pmin, Rmin, fbstr, isfig)
% 19-state SINS/GNSS integrated navigation Kalman filter.
% The 19-state includes:
% [phi(3); dvn(3); dpos(3); eb(3); db(3); lever(3); dT(1)]
% The 3- or 6- measurements are:
% [dvn(3)] or [dvn(3); dpos(3)]
%
% Prototype: [avp, xkpk, zkrk, sk, ins, kf] = sinsgps(imu, gps, ins, davp, imuerr, lever, dT, rk, Pmin, Rmin, fbstr, isfig)
% Inputs: imu - IMU array [wm, vm, t]
% gps - GNSS array [vn, pos, t] or [pos, t];
% ins - ins array, set by function 'insinit'
% davp - AVP array for P0 setting
% imuerr - set by function 'imuerrset', for P0 and Qk setting
% lever - lever arm from IMU to GNSS, if lever(4)=0 then Pk(lever)=0 for no lever estimation
% dT - time delay from IMU to GNSS, if dT(2)=0 then Pk(dT)=0 for no time delay estimation
% rk - measurement noise std(dpos) or std([dvn;dpos])
% Pmin - Pmin setting, Pmin<=0 for no Pmin constrain
% Rmin - Rmin setting, Rmin<=0 for no adaptive KF, Rmin=0~1 scale for adaptive KF and Rmin = Rk*Rmin
% fbstr - KF feedback string from 'avpedLT'
% isfig - figure flag
%
% Example 1:
% [avp1, xkpk, zkrk, sk, ins1, kf1] = sinsgps(imu, gps, 300);
%
% Example 2:
% ins = insinit([yaw;pos], ts);
% avperr = avperrset([60;300], 1, 100);
% imuerr = imuerrset(0.03, 100, 0.001, 1);
% Pmin = [avperrset([0.1,1],0.001,0.01); gabias(0.1, [10,30]); [0.01;0.01;0.01]; 0.0001].^2;
% Rmin = vperrset(0.001, 0.01).^2;
% [avp1, xkpk, zkrk, sk, ins1, kf1] = sinsgps(imu, gps, ins, avperr, imuerr, rep3(1), 0.01, vperrset(0.1,10), Pmin, Rmin, 'avp');
%
% Example 3:
% t0 = 1; t1 = 916;
% avp0 = getat(avp,t0);
% ins = insinit(avp0, ts);
% avperr = avperrset([60;300], 1, 10);
% imuerr = imuerrset(0.5, 1000, 0.1, 25);
% Pmin = [avperrset([0.2,1.0],0.01,0.2); gabias(0.01, [10,10]); [0.01;0.01;0.01]; 0.001].^2;
% Rmin = vperrset(0.1, 0.3).^2;
% [avp1, xkpk, zkrk, sk, ins1, kf] = sinsgps(imu(t0/ts:t1/ts,:), gps, ins, avperr, imuerr, rep3(1), 0.1, vperrset(0.1,10), Pmin, Rmin, 'avped');
%
% See also kfinit, kfupdate, imugpssyn, igsplot, insupdate, posprocessing.
% Copyright(c) 2009-2021, by Gongmin Yan, All rights reserved.
% Northwestern Polytechnical University, Xi An, P.R.China
% 09/10/2013, 06/02/2021, 02/11/2021
边栏推荐
- C#/VB. Net to delete watermarks in word documents
- Cloud Mail . NET Edition
- Summer Challenge database Xueba notes (Part 2)~
- Read fast RCNN in one article
- MetaForce原力元宇宙佛萨奇2.0智能合约系统开发(源码部署)
- Compress JS code with terser
- Five reasons for clothing enterprises to deploy MES management system
- 差异与阵列和阵列结构和链表的区别
- Web3's need for law
- STM32 project -- Topic sharing (part)
猜你喜欢
Summer Challenge database Xueba notes (Part 2)~
Planning and design of double click hot standby layer 2 network based on ENSP firewall
运维管理系统有哪些特色

慧通编程入门课程 - 2A闯关
C语言练习题_1
MySQL提升大量数据查询效率的优化神器

Station B's June ranking list - feigua data up main growth ranking list (BiliBili platform) is released!
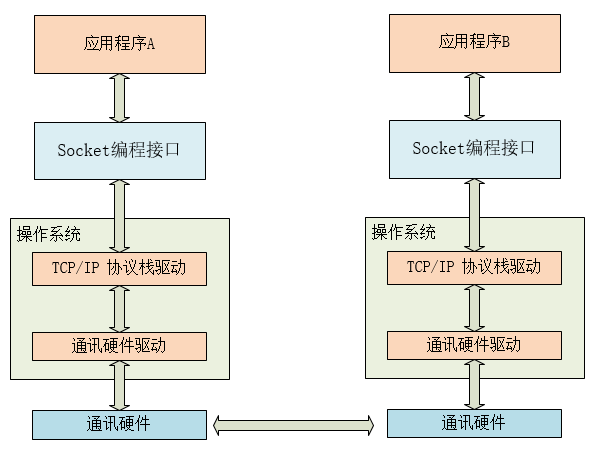
【Socket】①Socket技术概述
Redis入門完整教程:問題定比特與優化
C language exercises_ one
随机推荐
运维管理系统有哪些特色
Redis入门完整教程:客户端案例分析
实施MES管理系统时,哪些管理点是需要注意的
unity webgl自适应网页尺寸
Use of fiddler
unity中跟随鼠标浮动的面板,并可以自适应文字内容的大小
[Mori city] random talk on GIS data (II)
Number theory --- fast power, fast power inverse element
安全巡检的工作
How to build a 32core raspberry pie cluster from 0 to 1
Increase 900w+ playback in 1 month! Summarize 2 new trends of top flow qiafan in station B
惯导标定国内外研究现状小结(删减版)
Summer Challenge database Xueba notes (Part 2)~
CSDN summer camp course project analysis
The so-called consumer Internet only matches and connects industry information, and does not change the industry itself
Statistics of radar data in nuscenes data set
Here comes a white paper to uncover the technology behind Clickhouse, a node with 10000 bytes!
【软件测试】最全面试问题和回答,全文背熟不拿下offer算我输
A new path for enterprise mid Platform Construction -- low code platform
Untiy文本框的代码换行问题