当前位置:网站首页>SLAM面试总结
SLAM面试总结
2022-07-07 21:52:00 【王不偏】
作者:小葡萄
链接:https://zhuanlan.zhihu.com/p/68858564
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
关于面试题目我的目标公司是做自动驾驶或者机器人的公司,每个公司的面试不太一样。一种是先让你讲项目,一般在讲的时候会随时问问题,之后再是考一下基础SLAM问题和算法等。另一种是不让自己讲项目,面试官根据你的简历去不断深入发问。下面把我遇到的问题列举一下。
1、SLAM题目什么是闭环检测?常用的方法有哪些?你用的哪种方法?有没有创新?
2.解释一下Gauss-Netwon和LM算法。
3.熟悉Ceres优化库吗?说一下。
4.描述(扩展)卡尔曼滤波与粒子滤波,你自己在用卡尔曼滤波时遇到什么问题没有?
5.除了视觉传感,还用过其他传感吗?比如GPS,激光雷达。。。
6.什么是紧耦合、松耦合?优缺点。
7.你认为室内SLAM与自动驾驶SLAM有什么区别?
8.地图点的构建方法有哪些?
9.如果对于一个3D点,我们在连续帧之间形成了2D特征点之间的匹配,但是这个匹配中可能存在错误的匹配。请问你如何去构建3D点?
10.RANSAC在选择最佳模型的时候用的metric是什么?
11.除了RANSAC之外,还有什么鲁棒估计的方法?有哪几种鲁棒核函数?
12. 3D地图点是怎么存储的?表达方式?
13. 给你m相机n个点的bundle adjustment。
14. 当我们在仿真的时候,在迭代的时候,相机的位姿会很快的接近真值。而地图点却不能很快的收敛这是为什么呢?
15. LM算法里面那个 是如何变化的呢?
16. 说一下3D空间的位姿如何去表达?李群和李代数的关系。
17. 求导 (偏导R1R2/偏导R1)
18. 给你一个H高W宽的图像或者matrix,问如何去访问每一个元素,是先访问行呢?还是先访问列?提示:跟缓存还有关系~
19. 写出单目相机的投影模型,畸变模型。
20. 说一个自己熟悉的SLAM算法,Lidar/Visual slam,说优缺点。
21. 读Maplab,设计室内服务机器人地图更新的方法、流程。
22. 安装2D lidar的平台匀速旋转的时候,去激光数据畸变,写代码给两组已经匹配好的3D点,计算相对位姿变换。已知匹配的ICP问题,写代码。
23. ORB-SLAM初始化的时候为什么要同时计算H矩阵和F矩阵?
24. 说一下Dog-Leg算法什么是边缘化?
25. First Estimate Jacobian?一致性?可观性?
26. 说一下VINS-Mono的优缺点
27. 你做的工作在本质上有什么不同,贡献,创新本质上在哪里?
28. 什么是Essential,Fundamental矩阵?给定几个连续帧的带有位姿的帧,如何去测量车道线相对于世界坐标系的坐标。
29. 在给定一些有噪声的GPS信号的时候如何去精准的定位?
30. 如何标定IMU与相机之间的外参数?给你xx误差的GPS,给你xx误差的惯导你怎么得到一个cm级别的地图。
31. 计算H矩阵和F矩阵的时候有什么技巧呢?实际上在问归一化的操作。
32. 给一组点云,从中提取平面。
33. 给一张图片,知道相机与地面之间的相对关系,计算出图的俯视图。
34. 双线性差值如何去做,写公式。
35. RGB-D的SLAM和RGB的SLAM有什么区别?
36. 机器人从超市门口出发,前往3公里外的小区送货。请你设计一个定位系统,包括传感器的配置、算法的流程,用伪代码写出来。
37. 什么是ORB特征,ORB特征的旋转不变性是如何做的,BRIEF算子是怎么提取的。
38. 如果把一张图像去畸变,写公式,流程。
39. ORB-SLAM中的特征是如何提取的?如何均匀化的?
数据结构部分
40. 算法数据结构&C++ORB-SLAM的共视图是什么结构?内部如何存储的?
41. 写一个四叉树的结构
42. 不用递归遍历二叉树
43. 求最大连通域
44. 多线程的实现
45. 方式std::vector描述一下,如何动态扩展,如何shink内存
46. Eigen是行优先还是列优先
47. unorder容器与ordered容器的区别
48. 说一下Mat是如何析构的
49. 说一下智能指针,shared_ptr与unique_ptr
50. 说一下什么是虚函数
51. 普通指针如何实现一块内存只能有一个指针指向这种功能
52. C++ RTTI 是什么东西?
53. C++是如何实现多态的?
54. vector的iterator什么时候失效?
55. 重建二叉树
56. 写CmakeLists.txt,写gcc指令
57. 一个图,给出两个一对的若干节点对,求两个节点之间的通路。
58. 实现一个稀疏矩阵的数据结构,并实现稀疏矩阵的加法。
59. 棋盘格,每个格子角点上有一个灯,按一下周围四个灯就会取反。开始的时候这个棋盘格上灯状态随机,问如何操作这些按钮可以使得整个棋盘全灭。
60. 编一个二分查找
61. 给你一个数组去排序,说排序算法
62. 给你2D平面的两个线段,判断两个线段是否相交
63. 写快速排序、写反转链表
64. 给两个排序数组,升序的。一个大小为n,一个大小为m。从中找出第k小的数字。
有时间的话最好把基础的SLAM算法自己实现一遍,比如PnP、ICP、BA等;多刷基础的算法题。
边栏推荐
- SRM supplier cloud collaborative management platform solution for building materials industry to realize business application scalability and configuration
- SQL database execution problems
- Count the top 10 films at the box office and save them in another file
- 城联优品作为新力量初注入,相关上市公司股价应声上涨150%
- 云原生正在吞噬一切,开发者该如何应对?
- 1. Sum of two numbers
- windows设置redis开启自动启动
- 系统架构设计师备考经验分享:论文出题方向
- Explain
- 三问TDM
猜你喜欢
Add data analysis tools in Excel

Oracle database backup and recovery

B_QuRT_User_Guide(36)
UE4_UE5结合罗技手柄(F710)使用记录
Unity3d Learning Notes 6 - GPU instantiation (1)
Unity3D学习笔记6——GPU实例化(1)
Description of longitude and latitude PLT file format

包装行业智能供应链S2B2B商城解决方案:开辟电商消费新生态
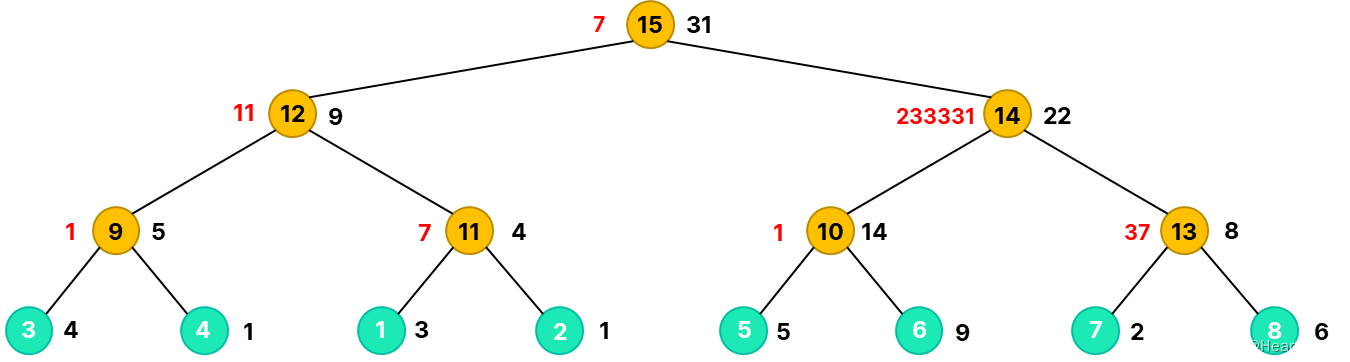
2021ICPC上海 H.Life is a Game Kruskal重构树
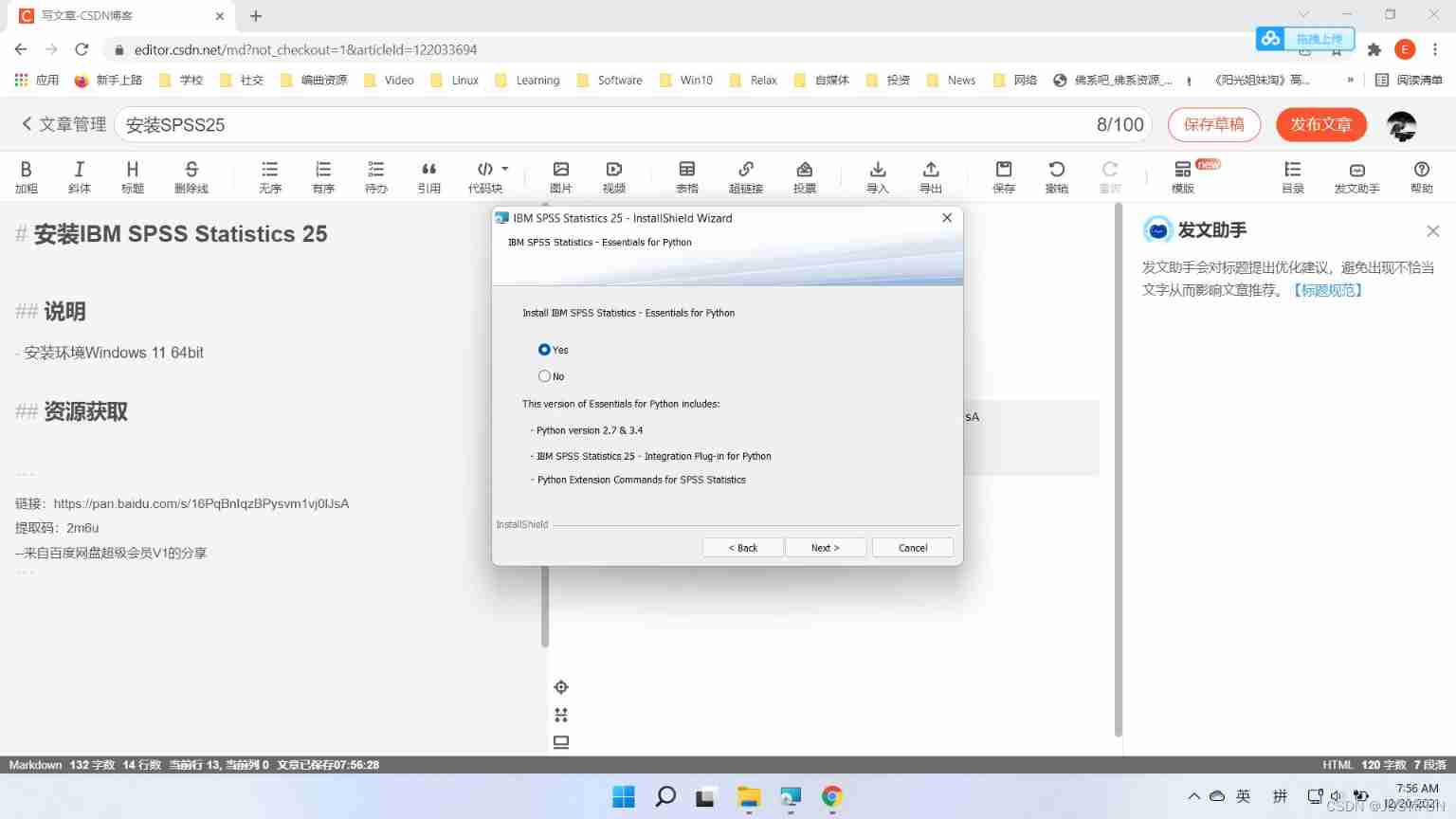
Installing spss25
随机推荐
CAIP2021 初赛VP
Unity3d learning notes 4 - create mesh advanced interface
B_QuRT_User_Guide(38)
Talk about the design and implementation logic of payment process
One week learning summary of STL Standard Template Library
The text editor of markdown class should add colors to fonts (including typora, CSDN, etc.)
建筑建材行业SRM供应商云协同管理平台解决方案,实现业务应用可扩展可配置
648. Word replacement
PCB wiring rules of PCI Express interface
The 19th Zhejiang Provincial Collegiate Programming Contest 2022浙江省赛 F.EasyFix 主席树
Home appliance industry channel business collaboration system solution: help home appliance enterprises quickly realize the Internet of channels
Explain
php 使用阿里云存储
The 19th Zhejiang Provincial College Programming Contest 2022 f.easyfix chairman tree
B_ QuRT_ User_ Guide(37)
Archlinux install MySQL
FPGA基础篇目录
USB (十八)2022-04-17
树后台数据存储(採用webmethod)[通俗易懂]
B_QuRT_User_Guide(36)