当前位置:网站首页>Rebuild my 3D world [open source] [serialization-3] [comparison between colmap and openmvg]
Rebuild my 3D world [open source] [serialization-3] [comparison between colmap and openmvg]
2022-07-05 08:55:00 【Li Yingsong~】
stay Rebuild my 3D The world Series of Second articles , I mentioned about SFM Part is choosing Colmap still OpenMVG The problem of , And decided to practice the truth .Colmap The official website provides a test program with an interface , It's very convenient to use , I downloaded. 3.6 edition , The address is colmap 3.6.
and OpenMVG It can be compiled easily , It does not provide programs with interfaces , There are console programs that can be tested , The results can be imported Colmap Visualization in the interface program .
0. Preface
This test is generally a shallow test , I simply reconstruct the visual effect from the scene 、 Reconstruction efficiency 、 Reprojection error 、 Image pose restoration integrity, etc . In fact, some more professional evaluation indicators , Such as the difference between the point cloud or control point of the scene and the true value 、 The difference between pose and true value , Not evaluated in this experiment , So I'm sorry to remind you that this is not a professional test , The final result may not be so professional or accurate , Please forgive me. .
1. Data selection
After the procedures are deployed , The first step is to select test data , Here I choose according to the type of data 6 Group data , Not a lot of data ( Not more than 1000 Zhang , The amount of data is too large, and the test is too time-consuming ), The scenes are different , There are farmland and buildings ; There are outdoor and indoor ; There are drones and digital cameras .
What needs to be added is , In order to fit our theme , I just hope to use some simple equipment to rebuild the surrounding 3D The world , So I also took two sets of mobile phone photo collections , To test the SFM The effect of , One is a running shoe , The second is a dinosaur model .
Below is an overview of all the data :
| Data name | Number of images | Size | Camera type | Scene description | Yes no GPS |
|---|---|---|---|---|---|
| Small Buildings | 36 | 4592x3056 | Unmanned aerial vehicle (uav) (AscTecFalcon 8) | Architecture | Yes |
| Urban | 113 | 5472x3648 | Unmanned aerial vehicle (uav) (senseFly) | Farmland , Architecture , Naked land | Yes |
| Person-hall | 330 | 5616x3744 | Digital camera (Canon) | Architecture 、 tree 、 Close up | nothing |
| Graham-hall | 711 | 5316x3744 | Digital camera (Canon) | indoor , Close up | nothing |
| Shoe | 42 | 4032x3024 | mobile phone ( samsung S20+) | Articles for daily use | nothing |
| Dinosaur | 55 | 4032x3024 | mobile phone ( samsung S20+) | Model | nothing |
 |  |
 |  |
 |  |
2. Test environment
All tests are conducted on my desktop , The configuration is as follows
| platform | model |
|---|---|
| CPU | Intel I7-8700K 3.7GHz |
| GPU | NVIDIA GTX 1080 8G |
3. Parameter setting
Colmap All use default parameters , Small vocabulary trees are used in feature matching , Applicable to less than 1000 Image set of . Download address :vocab_tree_flickr100K_words32K
OpenMVG All use default parameters , When the sensor model cannot be recognized , Provide initial focal length max ( w , h ) ∗ 1.2 \max(w,h)*1.2 max(w,h)∗1.2. Please refer to :openMVG softwares & tools. And use the generated results OpenMVG Turn your own tools into Colmap Of SFM Format in Colmap The program shows .
Both use Incremental SFM , And they are not used GPS auxiliary SFM, Although some data have bands GPS And OpenMVG Provides assistance GPS Of SFM, But because of Colmap There is no module , So to be fair , They are not used in the test .
In order to verify , Some test data will be used in the middle Agisoft Metashape Run again ,Agisoft Metashape The predecessor was Agisoft Photoscan, With SFM Grow perceptibly .
4. test result
1 Small Buildings 36p 4592x3056
Colmap
| step | Time ( branch ) |
|---|---|
| feature extraction Feature Extraction | 0.094 |
| Feature matching Feature Matching | 1.723 |
| Beam adjustment Bundle adjustment | 0.996 |
| SFM Total time | 2.813 |
| Re projection error average | 0.89 |
| Number of reconstructed images / Sparse points | 36 / 20972 |

OpenMVG
| step | Time ( branch ) |
|---|---|
| feature extraction Feature Extraction | 1.867 |
| Feature matching Feature Matching | 0.583 |
| Beam adjustment Bundle adjustment | 1.067 |
| SFM Total time | 3.517 |
| Re projection error average | 0.28 |
| Number of reconstructed images / Sparse points | 36 / 69791 |
There is not much difference between the two figures ,OpenMVG Reconstruction efficiency is slightly lower , More sparse points are generated , The average re projection error is also smaller .
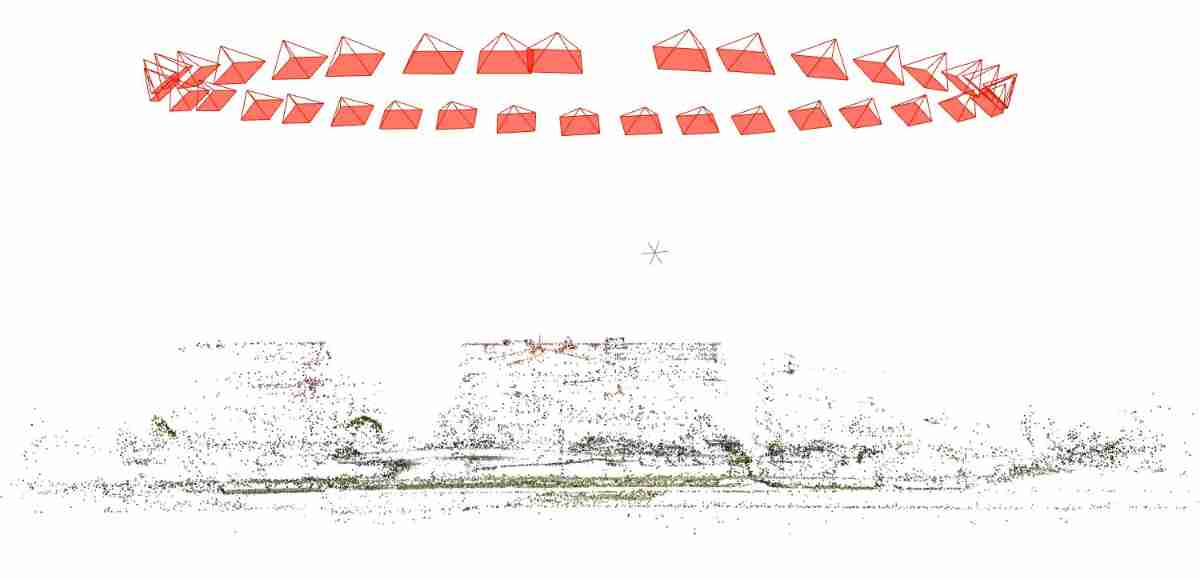
2 Urban 113p 5472x3648
Colmap
| step | Time ( branch ) |
|---|---|
| feature extraction 【Feature Extraction】 | 1.195 |
| Feature matching 【Feature Matching】 | 7.414 |
| Beam adjustment Bundle adjustment | 2.898 |
| SFM Total time | 11.507 |
| Re projection error average | 1.07 |
| Number of reconstructed images / Sparse points | 113 / 73691 |
The scene looks a little crooked , In order to verify , I use commercial software Agisoft Metashape Also ran once , Time consuming 102.344 second (1.706 branch ), Very efficient , Reconstruction image 113 Zhang , common 173095 Sparse , give the result as follows :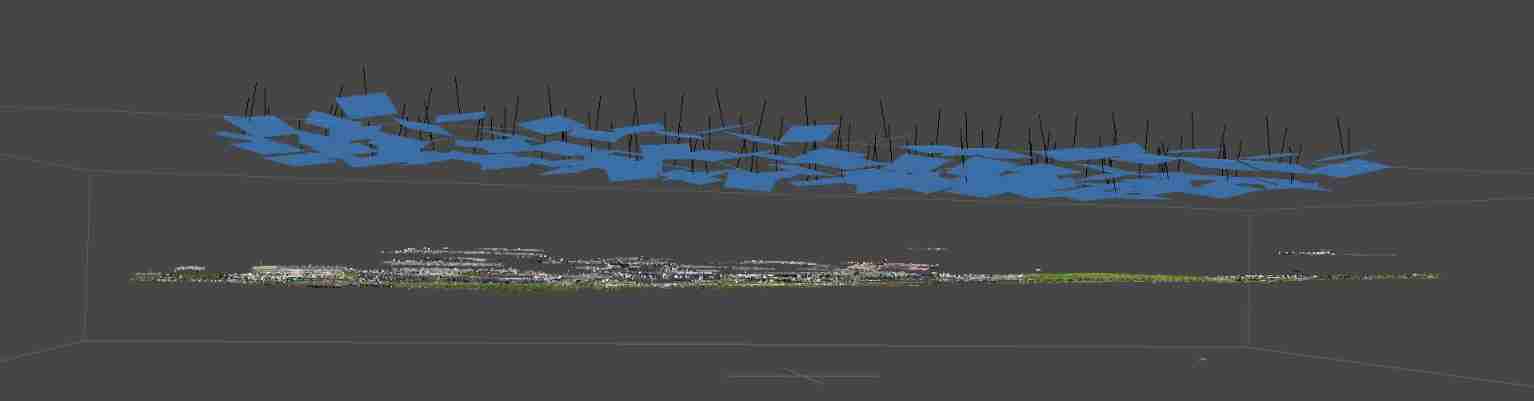
The scene is flat , It can be judged Colmap The reconstructed scene is a little drifting (Drift) Of . But it should be noted that ,Metashape There is assistance GPS, and Colmap not used GPS auxiliary .
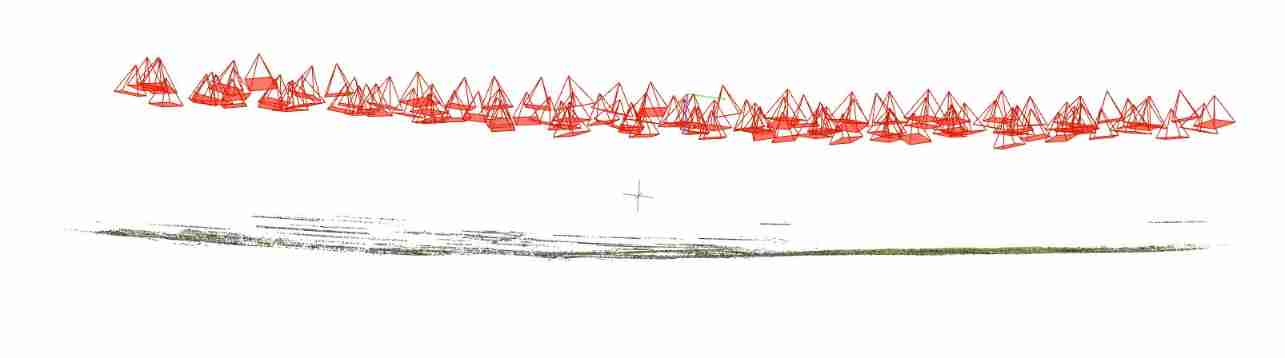
OpenMVG
| step | Time ( branch ) |
|---|---|
| feature extraction Feature Extraction | 8.200 |
| Feature matching Feature Matching | 23.13 |
| Beam adjustment Bundle adjustment | 12.13 |
| SFM Total time | 43.46 |
| Re projection error average | 0.37 |
| Number of reconstructed images / Sparse points | 113/ 408068 |
OpenMVG The reconstructed scene also has a bending trend , The degree of curvature looks better than Colmap It will be better , But it didn't reach Metashape The level of ( Whereas Metashape It was used GPS Auxiliary and OpenMVG No, , This result is acceptable ).
OpenMVG The reconstruction time is significantly longer than Colmap Of ( near 4 times ), Even though the algorithm has used multithreading ,CPU Also basically in a busy state .
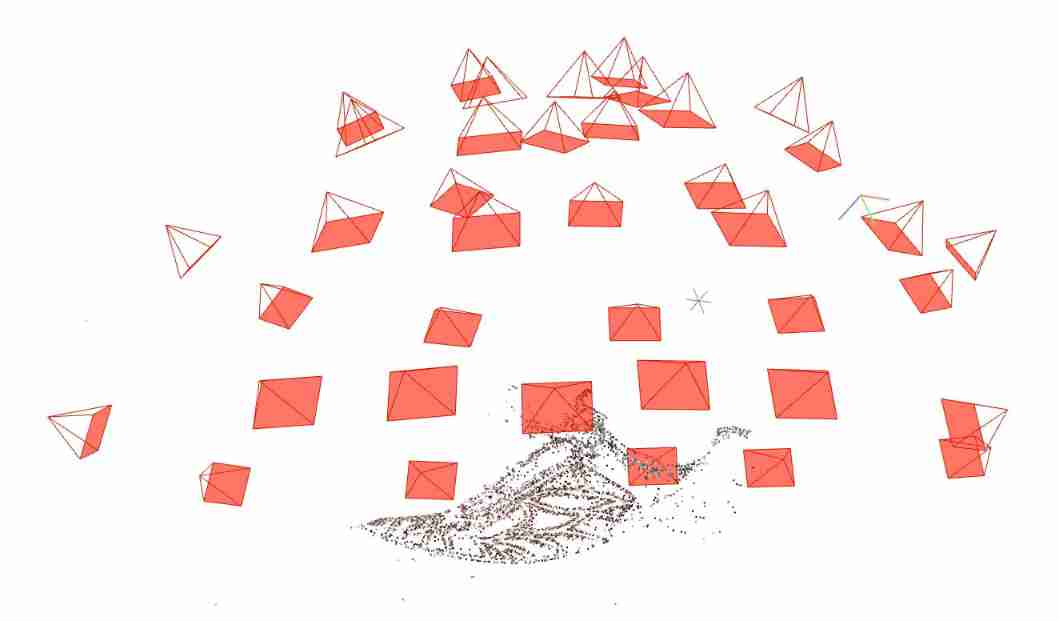
3 Person-hall 330p 5616x3744
Colmap
| step | Time ( branch ) |
|---|---|
| feature extraction 【Feature Extraction】 | 1.169 |
| Feature matching 【Feature Matching】 | 36.197 |
| Beam adjustment Bundle adjustment | 22.108 |
| SFM Total time | 59.474 |
| Re projection error average | 0.75 |
| Number of reconstructed images / Sparse points | 330 / 179134 |
 |  |
The effect looks good , The structure recovery is relatively regular . We also use Agisoft Metashape Run it over , Because the photo itself does not GPS, So let's see if GPS when Metashape How are they performing? :
 |  |
Equally robust reconstruction results , Time consuming 509.577 second (8.493 branch ), Very efficient , Reconstruction image 330 Zhang , Generate sparse points 226761.
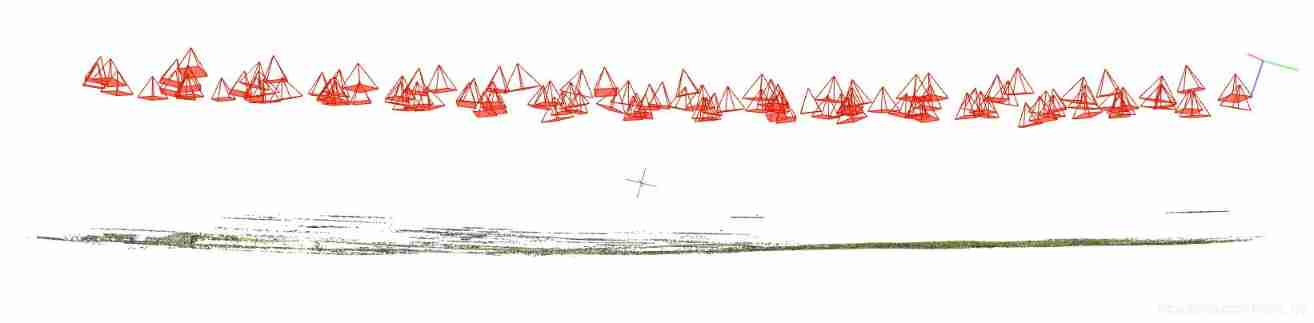
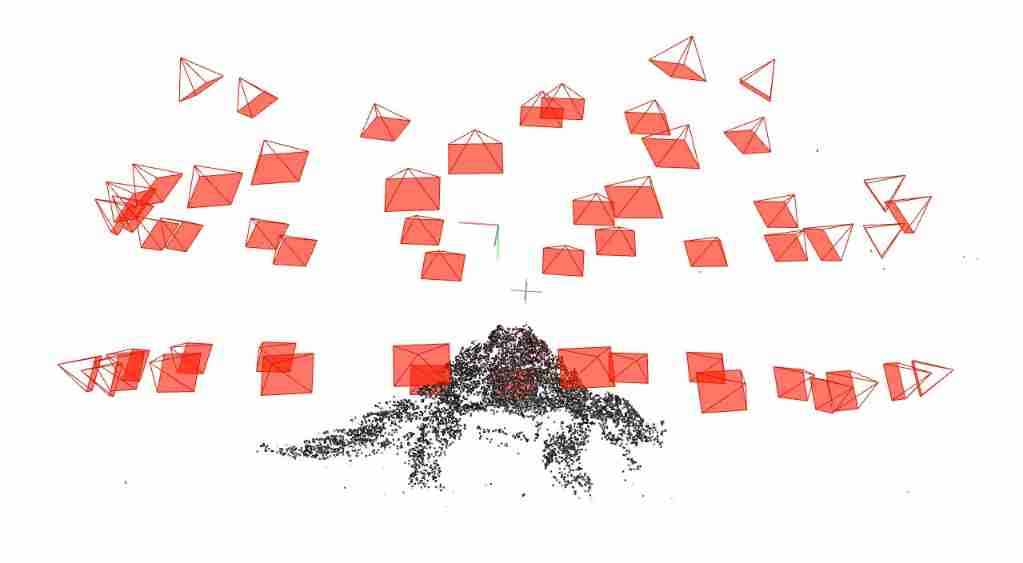
OpenMVG
| step | Time ( branch ) |
|---|---|
| feature extraction Feature Extraction | 29.91 |
| Feature matching Feature Matching | 247.78 |
| Beam adjustment Bundle adjustment | 130.38 |
| SFM Total time | 408.07 |
| Reprojection error | 0.26 |
| Number of reconstructed images / Sparse points | 330/ 900759 |
 |  |
OpenMVG The reconstruction of the scene is intuitive and Colmap And Metashape Are relatively similar , It's just near 7 Hours The time is really too “ Very long ” 了 .
4 Graham-hall 711p 5616x3744
Colmap
| step | Time ( branch ) |
|---|---|
| feature extraction 【Feature Extraction】 | 2.317 |
| Feature matching 【Feature Matching】 | 25.141 |
| Beam adjustment Bundle adjustment | 48.798 |
| SFM Total time | 76.256 |
| Re projection error average | 0.97 |
| Number of reconstructed images / Sparse points | 691/ 171956 |
 |  |
The effect is good ,
OpenMVG
In view of the previous group 330 Zhang took nearly 7 Hours , This group of experiments will not be done .
PS. The following two groups are for more intuitive observation of the reconstruction effect , about Shoe Data and Dinosaur data , I use Colmap Dense point clouds are reconstructed .
5 Shoe 42p 4032x3024
Colmap
| step | Time ( branch ) |
|---|---|
| feature extraction 【Feature Extraction】 | 0.085 |
| Feature matching 【Feature Matching】 | 1.112 |
| Beam adjustment Bundle adjustment | 0.259 |
| SFM Total time | 1.456 |
| Re projection error average | 0.68 |
| Number of reconstructed images / Sparse points | 38 / 5059 |

OpenMVG
| step | Time ( branch ) |
|---|---|
| feature extraction Feature Extraction | 1.63 |
| Feature matching Feature Matching | 0.37 |
| Beam adjustment Bundle adjustment | 0.32 |
| SFM Total time | 2.32 |
| Re projection error average | 0.24 |
| Number of reconstructed images / Sparse points | 39/ 19794 |
This data does not show much difference between the two ,OpenMVF The re projection error will be smaller .
Colmap Rebuild the dense point cloud as follows :
| step | Time ( branch ) |
|---|---|
| Stereo matching 【Stereo】 | 33.727 |
| Point cloud fusion 【Fusion】 | 1.494 |

6 Dinosaur 55p 4032x3024
| step | Time ( branch ) |
|---|---|
| feature extraction 【Feature Extraction】 | 0.096 |
| Feature matching 【Feature Matching】 | 1.098 |
| Beam adjustment Bundle adjustment | 0.488 |
| SFM Total time | 1.682 |
| Re projection error average | 0.91 |
| Number of reconstructed images / Sparse points | 55 / 10383 |
OpenMVG
| step | Time ( branch ) |
|---|---|
| feature extraction Feature Extraction | 2.00 |
| Feature matching Feature Matching | 0.05 |
| Beam adjustment Bundle adjustment | 0.40 |
| SFM Total time | 2.45 |
| Re projection error average | 0.34 |
| Number of reconstructed images / Sparse points | 55/ 15796 |

This data does not show much difference between the two ,OpenMVF The re projection error will still be smaller .
Colmap Rebuild the dense point cloud as follows :
| step | Time ( branch ) |
|---|---|
| Stereo matching 【Stereo】 | 48.093 |
| Point cloud fusion 【Fusion】 | 1.945 |

5 summary
Colmap
In the absence of GPS In the case of assistance ,Colmap For small scenes (<1000 photos) The reconstruction quality of is still good , Basically, the scene structure can be restored completely and correctly , In addition to a set of ground data, some scenes drift , But I think if supplemented by GPS Information , This problem will be well solved .
The efficiency under the default parameters is low , And commercial software Metashape There is a big gap ,Colmap The default parameters described in the document aim at medium to high quality reconstruction , So the efficiency may be improved by setting some parameters , But it may also sacrifice accuracy to some extent .
except SFM,Colmap Dense reconstruction of is also very slow , It mainly consumes a lot of time on stereo matching , The effect is OK , The point cloud is thin , But support for weak textures is generally , Of course, this is also a general reconstruction problem . Because there is no such thing as OpenMVS Optimize the grid , So the final reconstructed mesh is not fine and smooth .
OpenMVG
Again , In the absence of GPS In the case of assistance , The reconstruction quality of small scenes is good . after “ Very long ” Reconstruction process of , Re projection error ratio Colmap smaller , And the drift phenomenon should be slightly better .
Whole SFM Pipeline Efficiency is really very low , So that bloggers gave up 700 Multiple data tests , near 7 Hour reconstruction 330 Zhang is unacceptable .
OpenMVG One of the reasons for low efficiency is that feature extraction adopts CPU Version of SIFT, Even after multithreading acceleration , Efficiency cannot match Colmap Of GPU edition SIFT comparison . Another reason is that enumeration method is used by default to establish feature matching , The number of matching pairs is very large and redundant , and Colmap The word tree is selected , A method that can quickly establish an appropriate number of matching pairs , There will be fewer matches .
choice
Based on the existing test results , I tend to use Colmap Instead of OpenMVG To complete SFM, The efficiency advantage is very obvious , And there is no obvious disadvantage in the integrity and accuracy of structural recovery .
Tips
- stay SFM in ,GPS Is a very important auxiliary information , On the one hand, it can be used to restore scale information ; On the other hand, it can effectively prevent scene drift ; In addition, it can also be used as auxiliary information when screening matching image pairs , Indirectly improve the matching efficiency .
- Improving the efficiency of feature extraction algorithm can effectively improve SFM The efficiency of , Generally speaking, based on GPU Our algorithm will have more advantages .
- Effectively reducing image matching image logarithm can also effectively improve SFM The efficiency of , The image retrieval method based on vocabulary tree can quickly screen candidate matching image pairs through image similarity , Effectively reduce matching , Improve matching efficiency . Another effective strategy is to reduce the sampling resolution when using the vocabulary tree strategy .
If you have any suggestions or opinions, please leave a message in the comment area ! Welcome to like collection !
Project source code address :TellusBuilder
Interested students , It is suggested to click star and watch , Of course, based on my work, what I want to do in the future is also welcome Fork ah .**
Follow bloggers !
About bloggers :
Li Yingsong ( You know : Li Yingsong )
Wuhan University Doctor of photogrammetry and remote sensing
Main direction Stereo matching 、 Three dimensional reconstruction
2019 Won the first prize of scientific and technological progress in surveying and mapping in ( Provincial and ministerial level )
3D sharing open source *
GitHub: https://github.com/ethan-li-coding
Personal wechat :( Add me to the Group )

边栏推荐
- Halcon snap, get the area and position of coins
- Codeworks round 681 (Div. 2) supplement
- Meta tag details
- ROS learning 1- create workspaces and function packs
- Codeworks round 639 (Div. 2) cute new problem solution
- Summary and Reflection on issues related to seq2seq, attention and transformer in hands-on deep learning
- [code practice] [stereo matching series] Classic ad census: (5) scan line optimization
- Program error record 1:valueerror: invalid literal for int() with base 10: '2.3‘
- Return of missing persons
- Mengxin summary of LCs (longest identical subsequence) topics
猜你喜欢
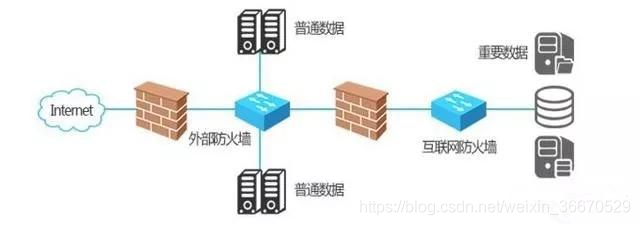
什么是防火墙?防火墙基础知识讲解
Attention is all you need

Guess riddles (11)

Programming implementation of ROS learning 2 publisher node
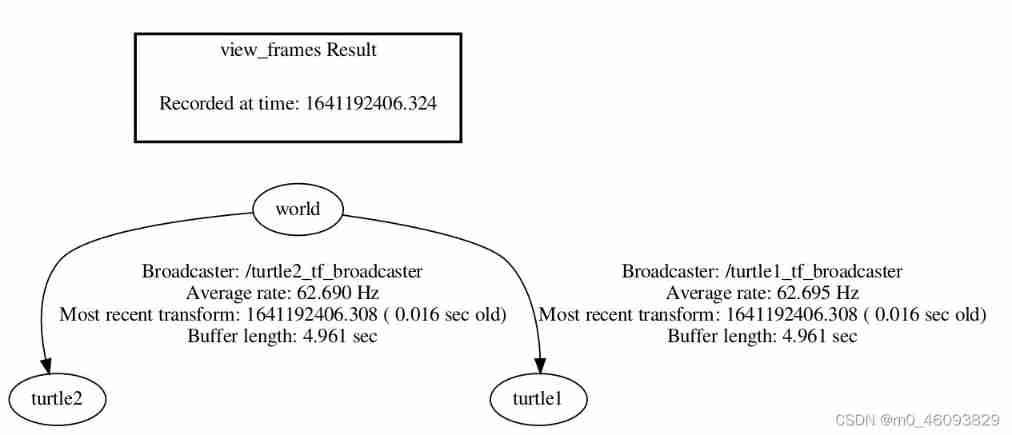
TF coordinate transformation of common components of ros-9 ROS
微信H5公众号获取openid爬坑记
![[daiy4] copy of JZ35 complex linked list](/img/bc/ce90bb3cb6f52605255f1d6d6894b0.png)
[daiy4] copy of JZ35 complex linked list
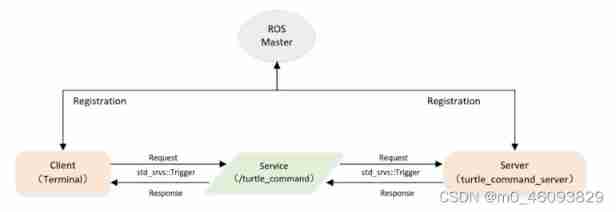
Programming implementation of ROS learning 6 -service node
![[Niuke brush questions day4] jz55 depth of binary tree](/img/f7/ca8ad43b8d9bf13df949b2f00f6d6c.png)
[Niuke brush questions day4] jz55 depth of binary tree
![[code practice] [stereo matching series] Classic ad census: (6) multi step parallax optimization](/img/54/cb1373fbe7b21c5383580e8b638a2c.jpg)
[code practice] [stereo matching series] Classic ad census: (6) multi step parallax optimization
随机推荐
Beautiful soup parsing and extracting data
AdaBoost use
Introduction Guide to stereo vision (1): coordinate system and camera parameters
ROS learning 1- create workspaces and function packs
Luo Gu p3177 tree coloring [deeply understand the cycle sequence of knapsack on tree]
Typescript hands-on tutorial, easy to understand
Install the CPU version of tensorflow+cuda+cudnn (ultra detailed)
Ros- learn basic knowledge of 0 ROS - nodes, running ROS nodes, topics, services, etc
Basic number theory - factors
696. Count binary substring
Solutions of ordinary differential equations (2) examples
Guess riddles (6)
Halcon affine transformations to regions
Halcon wood texture recognition
Pytorch entry record
[daiy4] copy of JZ35 complex linked list
【日常训练--腾讯精选50】557. 反转字符串中的单词 III
Huber Loss
C#图像差异对比:图像相减(指针法、高速)
Introduction Guide to stereo vision (2): key matrix (essential matrix, basic matrix, homography matrix)