当前位置:网站首页>Semantic SLAM源码解析
Semantic SLAM源码解析
2022-07-07 17:37:00 【蓝羽飞鸟】
对应github: https://github.com/floatlazer/semantic_slam
这个语义SLAM建图是基于ROS的
下面上源码解析:
首先从semantic_cloud.py出发,这里接收相机读入的topic, 会得到RGB图和深度图,
同时会起orb_slam2计算位姿,我们这里不讨论orb_slam2的算法细节,那是另一个大话题了。
node: semantic_cloud:
point_type = PointType.SEMANTICS_MAX
self.mean = np.array([104.00699, 116.66877, 122.67892]边栏推荐
- R语言fpc包的dbscan函数对数据进行密度聚类分析、查看所有样本的聚类标签、table函数计算聚类簇标签与实际标签构成的二维列联表
- R语言ggplot2可视化:使用ggpubr包的ggdensity函数可视化分组密度图、使用stat_overlay_normal_density函数为每个分组的密度图叠加正太分布曲线
- LC:字符串转换整数 (atoi) + 外观数列 + 最长公共前缀
- What does "true" mean
- 网易云信参与中国信通院《实时音视频服务(RTC)基础能力要求及评估方法》标准编制...
- Training IX basic configuration of network services
- Jerry's headphones with the same channel are not allowed to pair [article]
- tp6 实现佣金排行榜
- R语言ggplot2可视化:使用ggpubr包的ggecdf函数可视化分组经验累积密度分布函数曲线、linetype参数指定不同分组曲线的线型
- 小试牛刀之NunJucks模板引擎
猜你喜欢
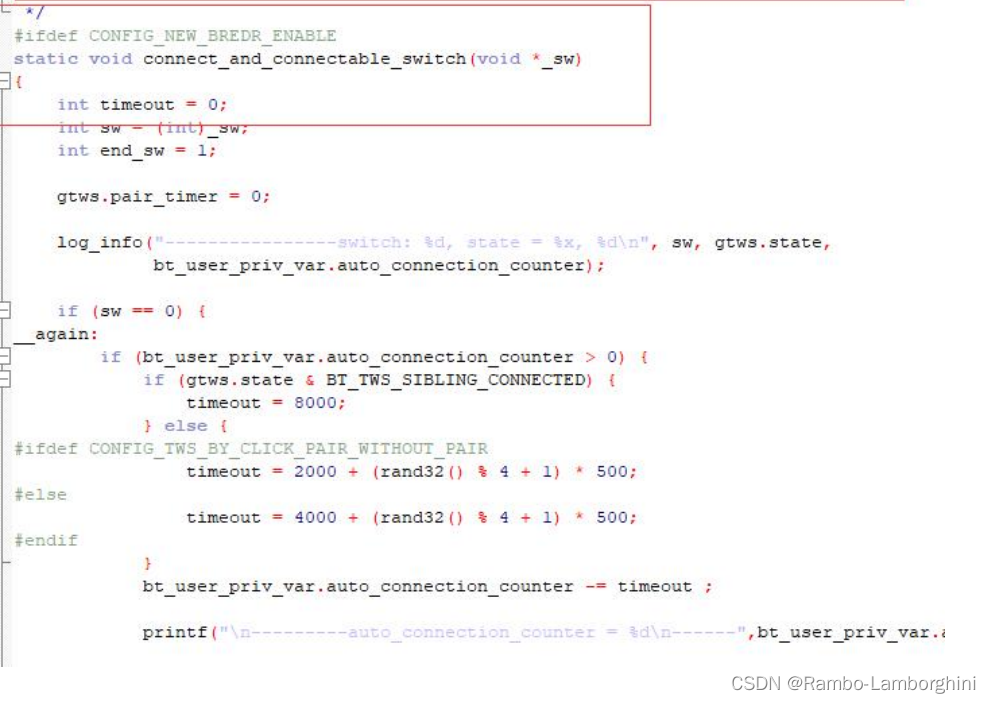
杰理之发起对耳配对、回连、开启可发现、可连接的轮循函数【篇】

ASP.NET幼儿园连锁管理系统源码
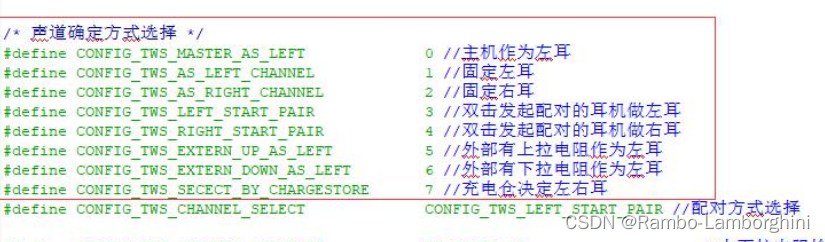
杰理之关于 TWS 声道配置【篇】

AD域组策略管理

开源OA开发平台:合同管理使用手册
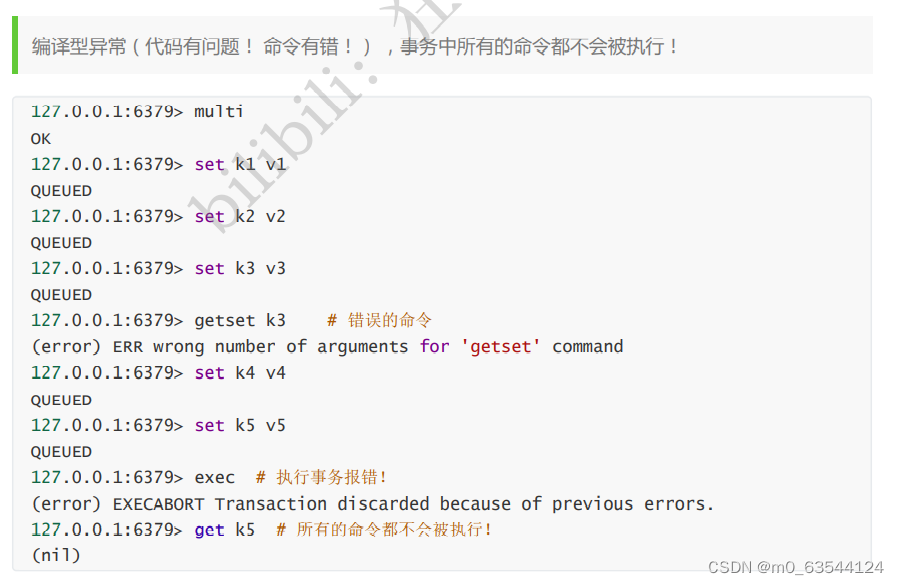
Redis——基本使用(key、String、List、Set 、Zset 、Hash、Geo、Bitmap、Hyperloglog、事务 )
![最多可以参加的会议数目[贪心 + 优先队列]](/img/f3/e8e939e0393efc404cc159d7d33364.png)
最多可以参加的会议数目[贪心 + 优先队列]
The strength index of specialized and new software development enterprises was released, and Kirin Xin'an was honored on the list

Tips and tricks of image segmentation summarized from 39 Kabul competitions
9 atomic operation class 18 Rohan enhancement
随机推荐
My creation anniversary
Kunpeng developer summit 2022 | Kirin Xin'an and Kunpeng jointly build a new ecosystem of computing industry
R language ggplot2 visualization: use the ggstripchart function of ggpubr package to visualize the dot strip plot, set the position parameter, and configure the separation degree of different grouped
Jürgen Schmidhuber回顾LSTM论文等发表25周年:Long Short-Term Memory. All computable metaverses. Hierarchical reinforcement learning (RL). Meta-RL. Abstractions in generative adversarial RL. Soccer learn
歌单11111
位运算介绍
Zhong Xuegao wants to remain innocent in the world
Navicat连接2002 - Can‘t connect to local MySQL server through socket ‘/var/lib/mysql/mysql.sock‘解决
论文解读(ValidUtil)《Rethinking the Setting of Semi-supervised Learning on Graphs》
What does "true" mean
Make this crmeb single merchant wechat mall system popular, so easy to use!
Command mode - unity
Longest common prefix (leetcode question 14)
Time tools
R language ggplot2 visualization: use the ggqqplot function of ggpubr package to visualize the QQ graph (Quantitative quantitative plot)
Jerry's headphones with the same channel are not allowed to pair [article]
L1-027 rental (Lua)
State mode - Unity (finite state machine)
Netease Yunxin participated in the preparation of the standard "real time audio and video service (RTC) basic capability requirements and evaluation methods" issued by the Chinese Academy of Communica
一锅乱炖,npm、yarn cnpm常用命令合集