当前位置:网站首页>2022.06.27_每日一题
2022.06.27_每日一题
2022-07-05 07:05:00 【诺.い】
题目描述
给定单向链表的头指针和一个要删除的节点的值,定义一个函数删除该节点。
返回删除后的链表的头节点。
注意:此题对比原题有改动
示例 1:
输入: head = [4,5,1,9], val = 5
输出: [4,1,9]
解释: 给定你链表中值为 5的第二个节点,那么在调用了你的函数之后,该链表应变为 4 -> 1 -> 9.
示例 2:
输入: head = [4,5,1,9], val = 1
输出: [4,5,9]
解释: 给定你链表中值为 1
的第三个节点,那么在调用了你的函数之后,该链表应变为 4 -> 5 -> 9.
说明:
题目保证链表中节点的值互不相同
若使用 C 或 C++ 语言,你不需要 free 或 delete 被删除的节点
代码
package com.nuo.Y_22_M_06;
/** * @description: TODO 剑指 Offer 18. 删除链表的节点 * @author nuo * @date 2022/6/27 20:12 * @version 1.0 */
public class Demo01 {
public ListNode deleteNode(ListNode head, int val) {
if (head.val == val) {
return head.next;
}
ListNode temp = head;
while (temp.next.val != val) {
temp= temp.next;
}
temp.next = temp.next.next;
return head;
}
@Test
public void test(String[] args) {
ListNode node = new ListNode(1);
node.next = new ListNode(2);
node.next.next = new ListNode(3);
node.next.next.next = new ListNode(4);
node.next.next.next.next = new ListNode(5);
node.next.next.next.next.next = new ListNode(6);
ListNode listNode = new Demo01().deleteNode(node, 5);
listNode.show();
}
}
class ListNode {
int val;
ListNode next;
ListNode(int x) {
val = x;
}
public void show() {
System.out.print(this.val);
if (this.next != null) {
System.out.print("->");
this.next.show();
}
}
}
边栏推荐
- SOC_SD_CMD_FSM
- Spinningup drawing curve
- Sre core system understanding
- Literacy Ethernet MII interface types Daquan MII, RMII, smii, gmii, rgmii, sgmii, XGMII, XAUI, rxaui
- 并发编程 — 如何中断/停止一个运行中的线程?
- ROS2——初识ROS2(一)
- 使用paping工具进行tcp端口连通性检测
- PHY drive commissioning --- mdio/mdc interface Clause 22 and 45 (I)
- Rehabilitation type force deduction brush question notes D2
- Database mysql all
猜你喜欢
What is linting
Pycahrm reports an error: indentation error: unindent does not match any outer indentation

Volcano resource reservation feature
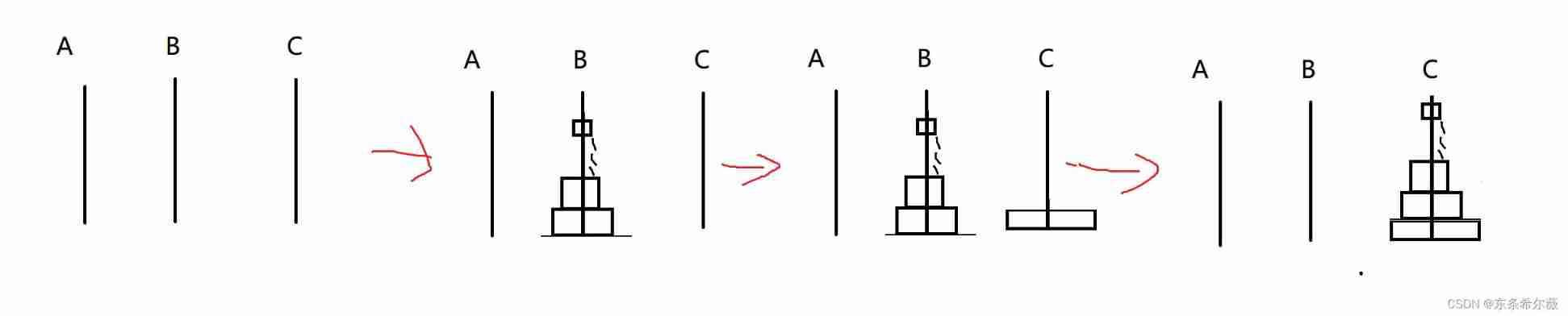
Some classic recursion problems
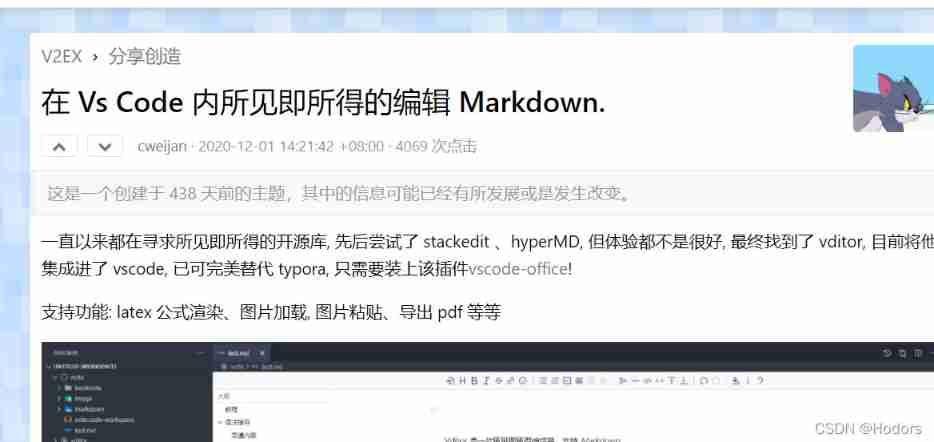
Vscode configures the typera editor for MD
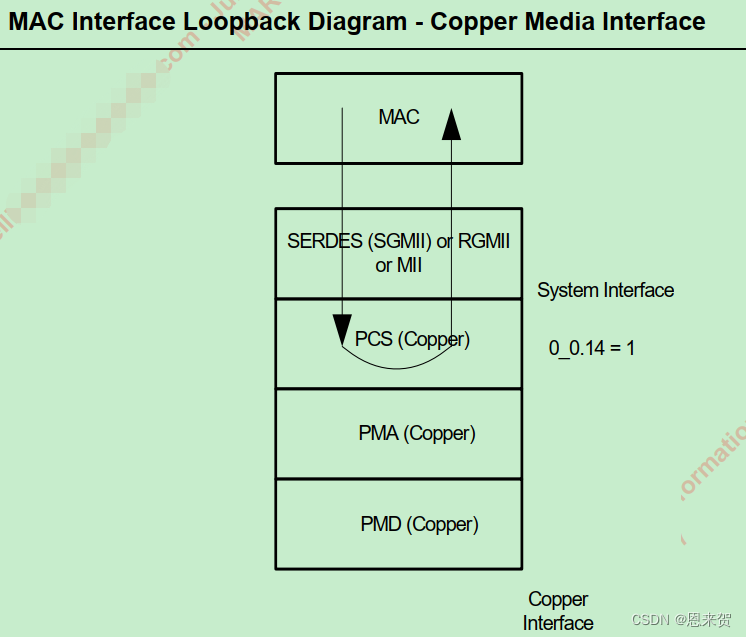
Marvell 88e1515 PHY loopback mode test
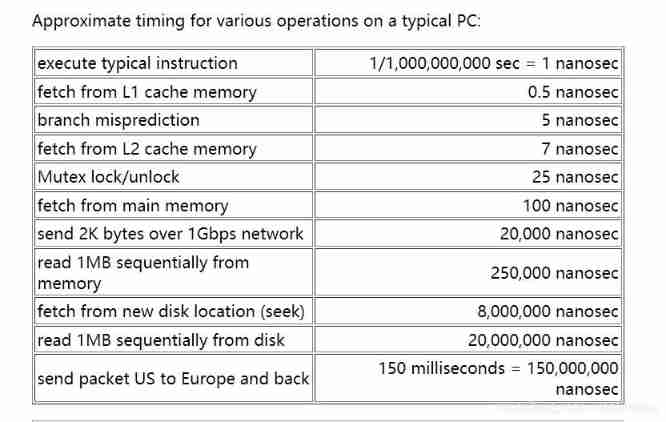
Instruction execution time
代码中的英语全部
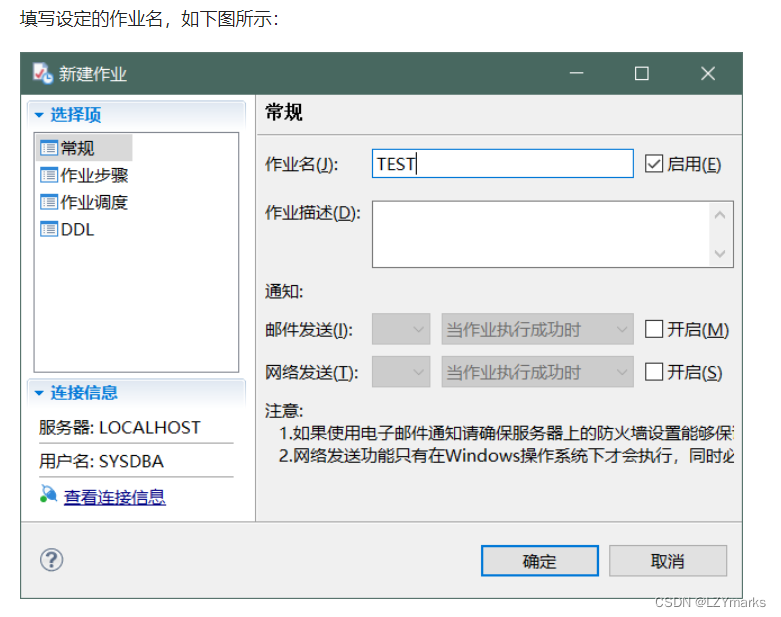
Dameng database all

Database mysql all
随机推荐
Markdown syntax
kata container
postmessage通信
小米笔试真题一
Ros2 - Service Service (IX)
testing framework
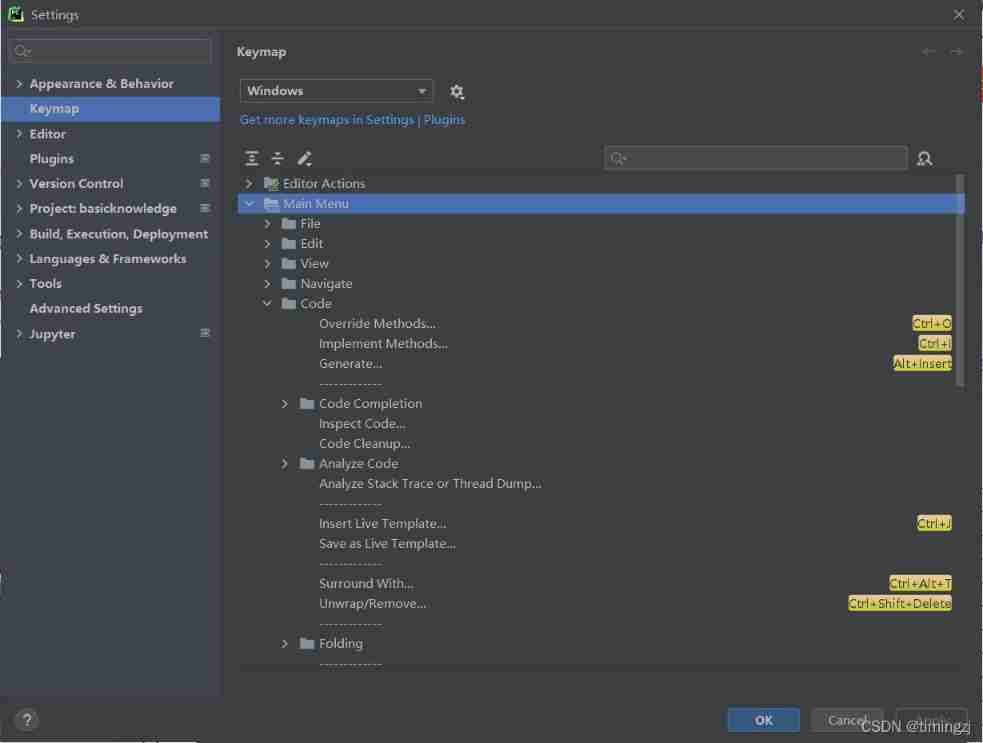
Vscode editor
*P++, (*p) + +, * (p++) differences
ROS2——配置开发环境(五)
Dameng database all
Unity 之 ExecuteAlways正在取代ExecuteInEditMode
解读最早的草图-图像翻译工作SketchyGAN
Xavier CPU & GPU high load power consumption test
Ros2 - common command line (IV)
GDB code debugging
ROS2——初识ROS2(一)
Logical structure and physical structure
Instruction execution time
基于Cortex-M3、M4的GPIO口位带操作宏定义(可总线输入输出,可用于STM32、ADuCM4050等)
在本地搭建一个微服务集群环境,学习自动化部署