当前位置:网站首页>Ros2 - configuration development environment (V)
Ros2 - configuration development environment (V)
2022-07-05 06:51:00 【Me and nano】
ROS2 Robot operating system
List of articles
Preface
ROS Robot development is definitely inseparable from coding , Our course will provide you with a large number of sample source code , How to view these codes 、 To write 、 How about compiling ? We need to make some preparations first , Complete the configuration of the development environment , I recommend two important development tools ——vscode and git.
One 、GIT
git Is a version management software , It's also because Linux born .
sudo apt install git
Two 、 install vscode
1. Install the software
sudo dpkg -i deb file name
Now install some common plug-ins , These in VS It's very simple
Chinese language pack
Python plug-in unit
C++ plug-in unit
CMake plug-in unit
vscode-icons
ROS plug-in unit
Msg Language Support
Visual Studio IntelliCode
URDF
Markdown All in One
边栏推荐
猜你喜欢



随机推荐
程序中的负数存储及类型转换
SRE核心体系了解
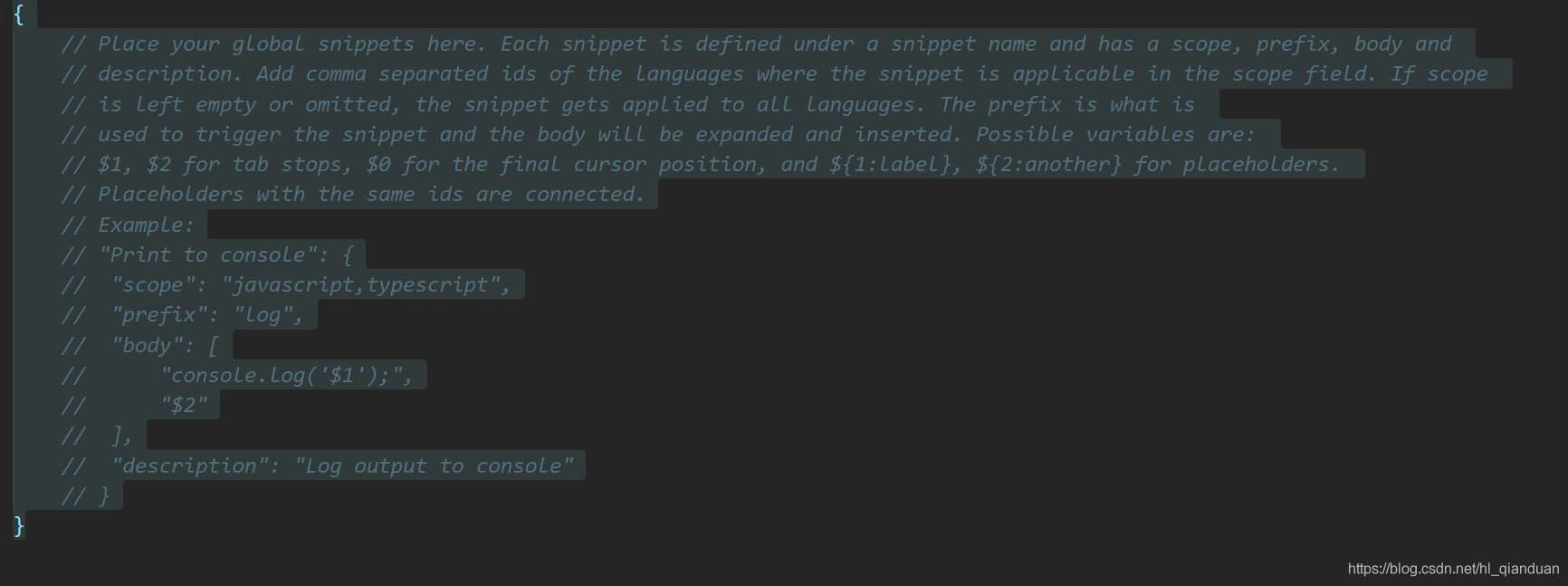
Vscode creates its own code template
ROS2——工作空间(五)
Utf8 encoding
Speedtree01 generator properties
inux摄像头(mipi接口)简要说明
How to correctly ask questions in CSDN Q & A
Cookie、Session、JWT、token四者间的区别与联系
NVM Downloading npm version 6.7.0... Error
ROS2——安装ROS2(三)
基于FPGA的一维卷积神经网络CNN的实现(八)激活层实现
Application of recyclerview
达梦数据库全部
【软件测试】06 -- 软件测试的基本流程
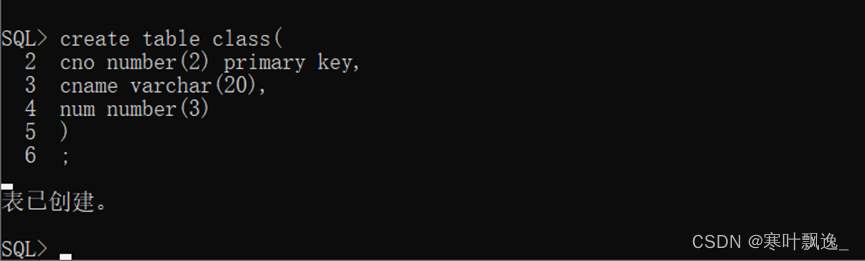
1. Create Oracle database manually
Ros2 - workspace (V)
Log4qt usage of logbase in QT project
VLAN experiment
Build a microservice cluster environment locally and learn to deploy automatically