当前位置:网站首页>SD_CMD_SEND_SHIFT_REGISTER
SD_CMD_SEND_SHIFT_REGISTER
2022-07-05 06:37:00 【捌肆幺幺】
1.接口
- 正常的时钟复位软复位
- 大哥cmd_fsm发过来的当前状态信号in_current_state
- 已经发送的bit数in_has_send_bit
- 从sd卡过来的命令号信号in_command_index、参数信号in_command_argument
- 还有高速时钟信号in_high_speed_clk,会和普通不一样
- 给到sd卡的命令信号out_sd_cmd
- 类似pad的oen信号的out_cmd_dir方向信号,1代表发给sd卡
input in_sd_clk;
input hrst_n;
input in_soft_reset;
//from fsm
input [2:0] in_current_state;
input [5:0] in_has_send_bit;
//from sd if
input [5:0] in_command_index;
input [31:0] in_command_argument;
input in_high_speed_clk;
output out_sd_cmd;
output out_cmd_dir;
2.传输方向out_cmd_dir
- 根据是否使用高速时钟来选择上升沿cmd_dir_pos或下降沿cmd_dir_neg传输
- cmd_dir_neg 比 cmd_dir_pos 延迟半个周期
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
cmd_dir_pos <= 1'b0;
else if (in_current_state == `CMD_STATE_SEND)
cmd_dir_pos <= 1'b1;
else if (in_current_state == `CMD_STATE_STOP)
cmd_dir_pos <= 1'b0;
else if (in_current_state == `CMD_STATE_WAIT_RECEIVE)
cmd_dir_pos <= 1'b0;
end
always @(negedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
cmd_dir_neg <= 1'b0;
else
cmd_dir_neg <= cmd_dir_pos;
end
assign out_cmd_dir = in_high_speed_clk ? cmd_dir_pos : cmd_dir_neg;
3.命令产生cmd_for_send
- 在SEND状态下根据已经发送的bit数in_has_send_bit给出相应的命令
- 命令的格式如下:共48位 需要6bit
- 使用case分别给每个bit时的cmd_for_send赋值
- 只给到argument(参数),之后的crc、结束位没有给出
- 组合逻辑要是没写完所有情况会生成锁存器latch,所以一开始就让cmd_for_send为0

always @(*) begin
cmd_for_send = 8'b0;
if (in_current_state == `CMD_STATE_SEND)
begin
case(in_has_send_bit)
6'b0,6'b1,6'b10,6'b11,6'b100,6'b101,6'b110,6'b111:
cmd_for_send = {
1'b0,1'b1,in_command_index};
6'b001000,6'b001001,6'b001010,6'b001011,6'b001100,6'b001101,6'b001110,6'b001111:
cmd_for_send = {
in_command_argument[31:24]};
6'b010000,6'b010001,6'b010010,6'b010011,6'b010100,6'b010101,6'b010110,6'b010111:
cmd_for_send = {
in_command_argument[23:16]};
6'b011000,6'b011001,6'b011010,6'b011011,6'b011100,6'b011101,6'b011110,6'b011111:
cmd_for_send = {
in_command_argument[15:8]};
6'b100000,6'b100001,6'b100010,6'b100011,6'b100100,6'b100101,6'b100110,6'b100111:
cmd_for_send = {
in_command_argument[7:0]};
endcase
end
end
4.命令输出out_sd_cmd
- 根据是否使用高速时钟来选择上升沿输出sd_cmd_pos或者时下降沿输出sd_cmd_neg
- sd_cmd_neg比sd_cmd_pos还是慢了半拍
- 由于板级路径长,要是全是组合逻辑pos建立时间可能会不满足,那么移动半个周期可能就满足了
- 用移位寄存器进行并转串,in_has_send_bit[2:0] == 3’b0表示没8bit进到case里拿数据
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
begin
sd_cmd_pos <= 1'b1;
shift_r <= 8'b0;
end
else if(!in_soft_reset)
begin
sd_cmd_pos <= 1'b1;
shift_r <= 8'b0;
end
else
begin
if(in_current_state == `CMD_STATE_SEND)
begin
if(in_has_send_bit[2:0] == 3'b0)
begin
case(in_has_send_bit)
6'b000000:
{
sd_cmd_pos,shift_r} <= {
1'b0,1'b1,in_command_index,1'b0};
6'b001000:
{
sd_cmd_pos,shift_r} <= {
in_command_argument[31:24],1'b0};
6'b010000:
{
sd_cmd_pos,shift_r} <= {
in_command_argument[23:16],1'b0};
6'b011000:
{
sd_cmd_pos,shift_r} <= {
in_command_argument[15:8],1'b0};
6'b100000:
{
sd_cmd_pos,shift_r} <= {
in_command_argument[7:0],1'b0};
6'b101000:
{
sd_cmd_pos,shift_r} <= {
crc_reg,1'b1,1'b0};
endcase
end
else
{
sd_cmd_pos,shift_r} <= {
shift_r,1'b0};
end
end
end
always @(negedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
sd_cmd_neg <= 1'b0;
else
sd_cmd_neg <= sd_cmd_pos;
end
assign out_sd_cmd = in_high_speed_clk ? sd_cmd_pos : sd_cmd_neg;
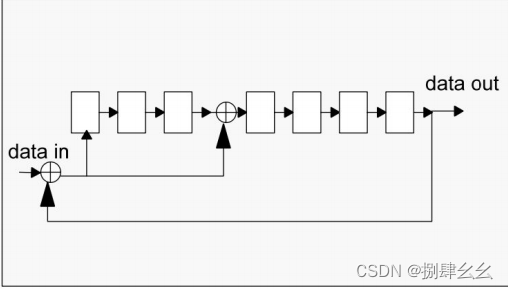
5.计算crc7
- 计算crc7,并通过out_sd_cmd 发送给sd卡
- 计算crc7的方法:[0]和[3]这两个比特要做异或运算,其他的移位就行,见下图
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
crc_reg <= 7'b0;
else if (!in_soft_reset)
crc_reg <= 7'b0;
else
if((in_current_state == `CMD_STATE_SEND) &&
(in_has_send_bit >= 6'b0) &&
(in_has_send_bit < 6'd40))
begin
crc_reg[0] <= cmd_for_send[in_has_send_bit[2:0]]^crc_reg[6];
crc_reg[1] <= crc_reg[0];
crc_reg[2] <= crc_reg[1];
crc_reg[3] <= cmd_for_send[in_has_send_bit[2:0]]^crc_reg[6]^crc_reg[2];
crc_reg[4] <= crc_reg[3];
crc_reg[5] <= crc_reg[4];
crc_reg[6] <= crc_reg[5];
end
else
crc_reg <= 7'b0;
end
边栏推荐
猜你喜欢
The problem of Chinese garbled code in the vscode output box can be solved once for life
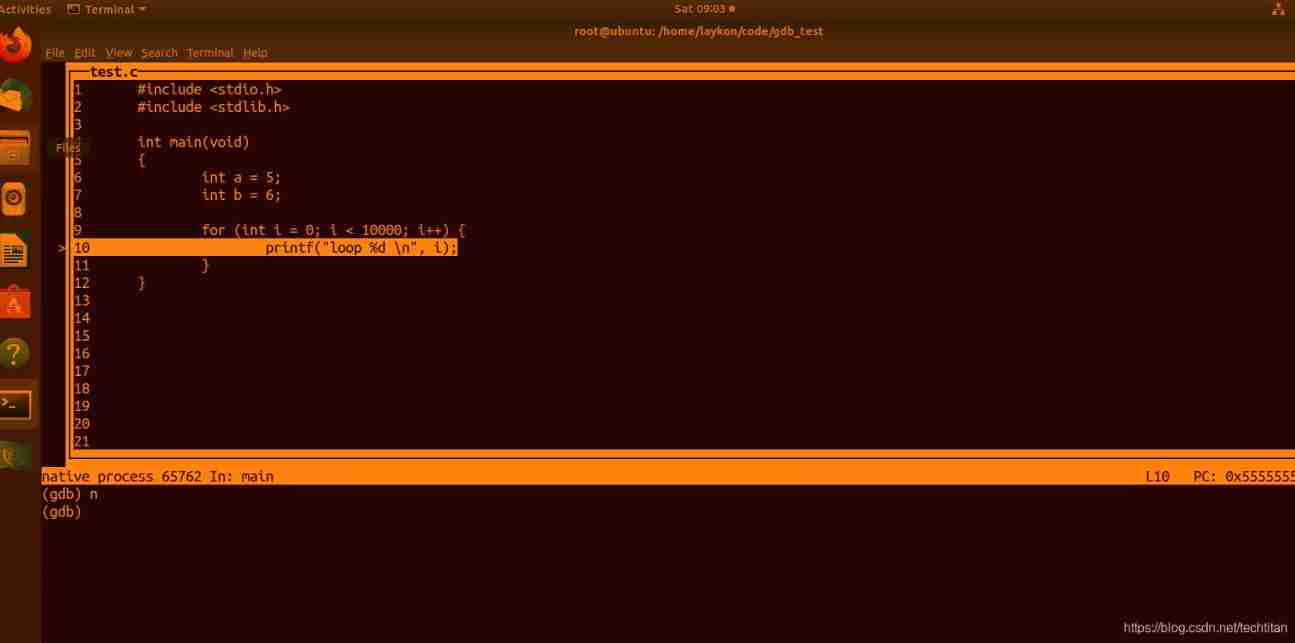
GDB code debugging
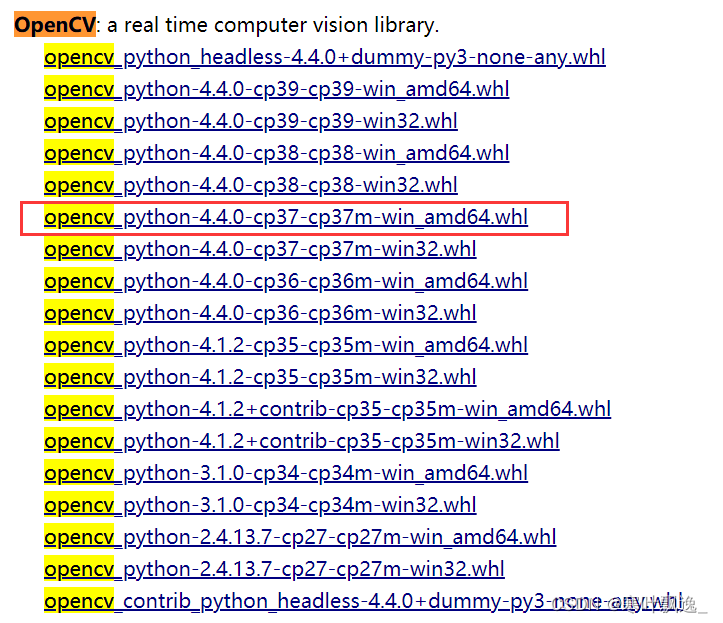
Install opencv -- CONDA to establish a virtual environment and add the kernel of this environment in jupyter
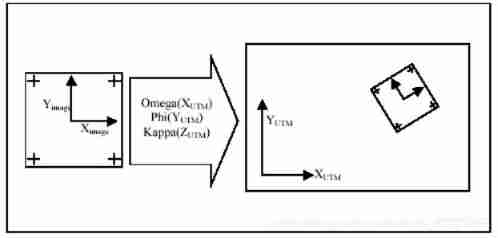
A brief introduction to heading/pitch/roll and omega/phi/kappa
The “mode“ argument must be integer. Received an instance of Object
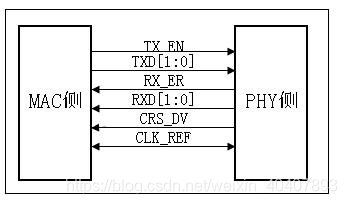
扫盲-以太网MII接口类型大全-MII、RMII、SMII、GMII、RGMII、SGMII、XGMII、XAUI、RXAUI

MySQL (UDF authorization)

Genesis builds a new generation of credit system

Database mysql all

Rehabilitation type force deduction brush question notes D2
随机推荐
Sum of two numbers, the numbers in the array are converted to decimal, added, and output inversely
Find the combination number acwing 888 Find the combination number IV
[algorithm post interview] interview questions of a small factory
mysql设置触发器问题
SRE核心体系了解
H5 模块悬浮拖动效果
2. Addition and management of Oracle data files
Technology blog learning website
Orin installs CUDA environment
Log4qt usage of logbase in QT project
Ret2xx---- common CTF template proposition in PWN
Chinese remainder theorem acwing 204 Strange way of expressing integers
[Chongqing Guangdong education] 1185t administrative leadership reference test of National Open University in autumn 2018
June 29, 2022 daily
Sre core system understanding
About vscode, "code unreachable" will be displayed when calling sendline series functions with pwntools“
The problem of Chinese garbled code in the vscode output box can be solved once for life
Redis-01. First meet redis
A brief introduction to heading/pitch/roll and omega/phi/kappa
Configuration method and configuration file of SolidWorks GB profile library