当前位置:网站首页>Introduction Guide to stereo vision (5): dual camera calibration [no more collection, I charge ~]
Introduction Guide to stereo vision (5): dual camera calibration [no more collection, I charge ~]
2022-07-05 08:56:00 【Li Yingsong~】
Dear students , Our world is 3D The world , Our eyes can observe three-dimensional information , Help us perceive distance , Navigation obstacle avoidance , So as to soar between heaven and earth . Today's world is an intelligent world , Our scientists explore a variety of machine intelligence technologies , Let the machine have the three-dimensional perception of human beings , And hope to surpass human beings in speed and accuracy , For example, positioning navigation in autopilot navigation , Automatic obstacle avoidance of UAV , Three dimensional scanning in the measuring instrument, etc , High intelligent machine intelligence technology is 3D Visual realization .
Stereo vision is an important direction in the field of 3D reconstruction , It simulates the structure of the human eye and simulates the binocular with two cameras , Project in Perspective 、 Based on triangulation , Through the logical complex homonymous point search algorithm , Restore the 3D information in the scene . It is widely used , Autopilot 、 Navigation obstacle avoidance 、 Cultural relic reconstruction 、 Face recognition and many other high-tech applications have its key figure .
This course will help you to understand the theoretical and practical knowledge of stereo vision from simple to profound . We will talk about the coordinate system and camera calibration , From passive stereoscopic to active stereoscopic , Even from deep recovery to grid construction and processing , Interested students , Come and explore the charm of stereovision with me !
This course is an electronic resource , So there will not be too many restrictions in the writing , But it will be logically clear 、 Easy to understand as the goal , Level co., LTD. , If there are deficiencies , Please give me some advice !
Personal wechat :EthanYs6, Add me to the technical exchange group StereoV3D, Talk about technology together .
CSDN Search for :Ethan Li Li Yingsong , see Web based courses .
Lesson code , Upload to github On , Address :StereoV3DCode:https://github.com/ethan-li-coding/StereoV3DCode
The first two bloggers introduced two single camera calibration methods , Some students will have doubts , This series is clearly stereo vision , Why introduce single camera calibration instead of dual camera calibration ? The reason is simple , That is, single camera calibration is the basis of dual camera calibration , say concretely , Dual camera calibration is to complete the calibration of two single cameras respectively , Then conduct the overall calibration . And listen to me ~
List of articles
Binocular stereo
Have a common sense cognition , That is, stereo vision generally refers to a stereo system composed of two cameras , Just like the human eye . When there is an overlapping area between the views taken by two cameras , They form a basic binocular stereo .
Double view through epipolar correction and stereo matching , You can get three-dimensional points through triangular relations ,
But the premise of all this :
- To accurately know the position relationship between two cameras , That is, the rotation of one camera to the other R R R Move peacefully t t t, namely The external parameters of the camera
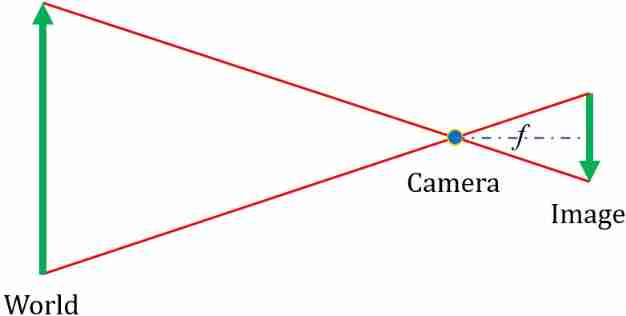
- To accurately know the internal equipment parameters of dual cameras , For example, like the main point ( x 0 , y 0 ) (x_0,y_0) (x0,y0)、 The focal length f f f、 Distortion parameters, etc , namely The internal parameters of the camera
Introduction to internal and external parameters , Please see the previous article : Introduction to stereo vision (1): Coordinate system and camera parameters

Dual camera calibration
In general , We have seen the most binocular stereoscopic , Fixed on a rigid structure by two different cameras , Form a stable binocular stereo system . In use , There will be no obvious mutual movement between cameras , The stable dual view structure can complete the acquisition of single frame depth information at any time . The following figure shows some examples :
 |  |  |
We said earlier , The camera internal parameter matrix can be obtained by a single camera K K K、 External parameter matrix R , t R,t R,t, Compared with single camera calibration, dual camera calibration
- One more relative external parameter , That is, the rotation matrix of the right camera relative to the left camera R R R Vector of peaceful shift t t t.
- Two absolute external parameters are missing , That is, the external parameter matrix calibrated by the single camera itself is no longer needed , Just keep 1 The relative external parameters obtained , It is called the external parameter of stereo vision system .( In fact, absolute external parameters are generally not required for single camera calibration , It is only natural output as calibrated output , In dual camera calibration , Absolute external parameters can be used as intermediate variables to calculate relative external parameters )
We said at the beginning of the article , Dual camera calibration is based on single camera calibration , I think smart students have come up with some ideas , First, we use the same shooting method to collect the calibration pattern , Most of the operation methods and precautions are the same , See Introduction to stereo vision (3): Zhang calibration method of camera calibration 【 Super detailed, worth collecting 】
The difference is this :
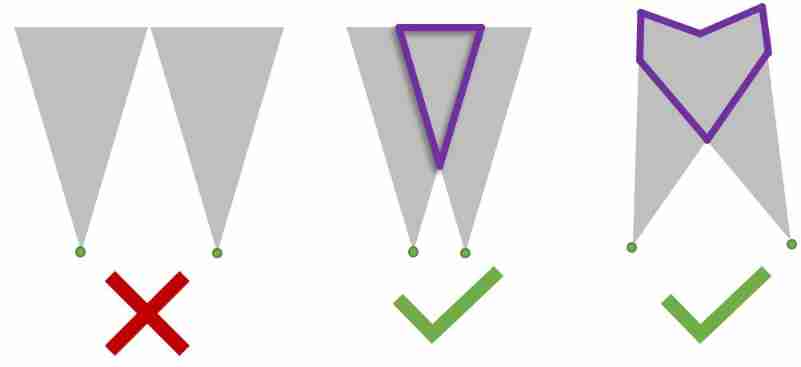
- Every time you shoot , Pay attention to whether the overlapping area of two cameras is enough , Generally more than 1/2 The image area of , Of course, the bigger the better , At some relatively large angles , A certain degree of overlap can be sacrificed .
- Note that the two cameras try to keep the same distance to collect , This is to ensure that the scale and clarity of the two views are consistent , Reduce the error caused by inconsistency .
Sketch Map :

The algorithm part
After image acquisition , Enter the algorithm section , As mentioned earlier , The first step is to calibrate the two cameras individually , Get the internal parameter matrix of each of the two cameras K、 Absolute external reference R , t R,t R,t( That is, the external parameters of the camera relative to the calibration plate at each acquisition ), And distortion coefficient d d d( there d d d Is the set of all distortion coefficients )
1. Do single camera calibration for two cameras separately , Get the internal parameter matrix of each of the two cameras K、 Absolute external reference R , t R,t R,t, And distortion coefficient d d d
Then some students may think of , According to the absolute external parameters collected each time , That is, the relative external parameters can be calculated , But obviously we will generate N Relative external parameters (N Is the number of image pairs collected , That is, the number of acquisition positions ), Which one is better ? Take the mean ? Or take the median ?
Experienced students will find out , Neither of these is reliable , Taking the mean value first has no robustness to significant outliers , As long as the absolute external parameter of a pair is wrong , The average value has a great influence ; Second, take the median because only one pair , The error average characteristic of multiple measurements is not used .
So the more reliable way is , Calculate the relative external parameters of each acquisition , And take the median value as the initial value , Based on minimizing the re projection error , Nonlinear iterative optimization obtains the optimal solution . Under this scheme , The internal parameters of the camera can be used as fixed values , The unknown number is N Set the absolute external parameters of the left camera ( R i , t i ) , i = 1 , . . n (R_i,t_i),i=1,..n (Ri,ti),i=1,..n、1 Group right relative relative relative external parameters relative to left camera R ′ , t ′ R',t' R′,t′. The equation of minimum re projection error is the same as that of single camera calibration , Only the absolute external parameters of the right camera are calculated by the absolute external parameters and relative external parameters of the left camera .
2. Calculate the relative external parameters of each acquisition , And take the median value as the initial value , Based on minimizing the re projection error , Nonlinear iterative optimization obtains the optimal solution
Because the second iteration optimization , Camera internal parameters are fixed , The number of external parameters is also reduced, and there is a more accurate initial value , So iteration will be relatively easier to converge and more accurate .
summary
Stereo vision is the premise of calculating depth through stereo matching :
- To accurately know the position relationship between cameras , That is, the rotation of one camera to the other R R R Move peacefully t t t, namely The external parameters of the camera
- Know the equipment parameters inside the camera accurately , For example, like the main point ( x 0 , y 0 ) (x_0,y_0) (x0,y0)、 The focal length f f f、 Distortion parameters, etc , namely The internal parameters of the camera
Compared with single camera calibration, dual camera calibration :
- One more relative external parameter , That is, the rotation matrix of the right camera relative to the left camera R R R Vector of peaceful shift t t t.
- Two absolute external parameters are missing , That is, the external parameter matrix calibrated by the single camera itself is no longer needed , Just keep 1 The relative external parameters obtained , It is called the external parameter of stereo vision system .
The difference between dual camera image acquisition and single camera image acquisition lies in :
- Every time you shoot , Pay attention to whether the overlapping area of two cameras is enough , Generally more than 1/2 The image area of , Of course, the bigger the better , At some relatively large angles , A certain degree of overlap can be sacrificed .
- Note that the two cameras try to keep the same distance to collect , This is to ensure that the scale and clarity of the two views are consistent , Reduce the error caused by inconsistency .
Steps of dual camera calibration algorithm :
- Do single camera calibration for two cameras separately , Get the internal parameter matrix of each of the two cameras K、 Absolute external reference R , t R,t R,t, And distortion coefficient d d d
- Calculate the relative external parameters of each acquisition , And take the median value as the initial value , Based on minimizing the re projection error , Nonlinear iterative optimization obtains the optimal solution
So you 
Homework
Here are some exercises for you , We can deepen our understanding through practice :
1 adopt opencv The interface provided by the open source library completes the calibration of dual cameras .
2 Higher order is , You can be independent opencv Library to write a set of dual camera calibration algorithm ? Or just use opencv To detect the corner coordinates , Other steps are implemented by yourself .
Please refer to the address :https://github.com/ethan-li-coding/StereoV3DCode [ Sorry to let it go , The code has not been updated for a long time , But do you believe that I will be more right one day ?]
边栏推荐
- Add discount recharge and discount shadow ticket plug-ins to the resource realization applet
- Guess riddles (8)
- The combination of deep learning model and wet experiment is expected to be used for metabolic flux analysis
- Causes and appropriate analysis of possible errors in seq2seq code of "hands on learning in depth"
- 图解网络:什么是网关负载均衡协议GLBP?
- C [essential skills] use of configurationmanager class (use of file app.config)
- C#图像差异对比:图像相减(指针法、高速)
- MPSoC QSPI Flash 升级办法
- Blue Bridge Cup provincial match simulation question 9 (MST)
- Redis实现高性能的全文搜索引擎---RediSearch
猜你喜欢

Guess riddles (8)
![[牛客网刷题 Day4] JZ35 复杂链表的复制](/img/bc/ce90bb3cb6f52605255f1d6d6894b0.png)
[牛客网刷题 Day4] JZ35 复杂链表的复制
Introduction Guide to stereo vision (1): coordinate system and camera parameters
Guess riddles (4)

319. Bulb switch
深度学习模型与湿实验的结合,有望用于代谢通量分析
Halcon Chinese character recognition

嗨 FUN 一夏,与 StarRocks 一起玩转 SQL Planner!
Mathematical modeling: factor analysis
![[Niuke brush questions day4] jz55 depth of binary tree](/img/f7/ca8ad43b8d9bf13df949b2f00f6d6c.png)
[Niuke brush questions day4] jz55 depth of binary tree
随机推荐
kubeadm系列-01-preflight究竟有多少check
微信H5公众号获取openid爬坑记
Codeforces Round #648 (Div. 2) D. Solve The Maze
Infix expression evaluation
Solution to the problems of the 17th Zhejiang University City College Program Design Competition (synchronized competition)
Dynamic dimensions required for input: input, but no shapes were provided. Automatically overriding
MPSoC QSPI Flash 升级办法
Halcon affine transformations to regions
Chris LATTNER, the father of llvm: why should we rebuild AI infrastructure software
How many checks does kubedm series-01-preflight have
Ros-10 roslaunch summary
Programming implementation of subscriber node of ROS learning 3 subscriber
Halcon wood texture recognition
Codeforces Round #648 (Div. 2) E.Maximum Subsequence Value
Ecmascript6 introduction and environment construction
Codeforces round 684 (Div. 2) e - green shopping (line segment tree)
How to manage the performance of R & D team?
Multiple linear regression (sklearn method)
Guess riddles (4)
The combination of deep learning model and wet experiment is expected to be used for metabolic flux analysis