当前位置:网站首页>Marathon envs project environment configuration (strengthen learning and imitate reference actions)
Marathon envs project environment configuration (strengthen learning and imitate reference actions)
2022-07-06 08:38:00 【daoboker】
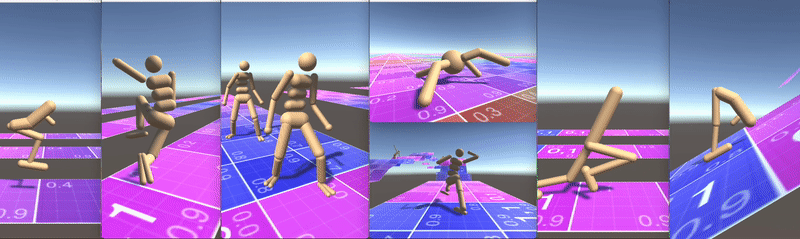
Run this project (Unity engine ) The main reason is that we can imitate reference actions in different physical engines . It has been run before Deepmimic(Bullet engine ),Deepmimic The reference action of is quaternion format , Can pass BvhToDeepMimic Change your reference action (.bvh), Of course, refer to action (.bvh) Can pass frankmocap Etc smpl Data set format conversion .
relevant : Use Unity and mlagents Carry out intensive learning practice
1. Main item :
1.1 To configure python Environmental Science
pip install mlagents==0.14.1
1.2 To configure Unity Environmental Science
Unity edition 2020.1.2f1
1.3 training
Official training documentation
If you want to be on your own unity Train instead of calling it .X86_64 Words , stay conda Enter the following command at the terminal and then Unity Inside out scene Scene press button button ,--run-id You can set it by yourself :
mlagents-learn config/marathon_envs_config.yaml --train --run-id=hopper001
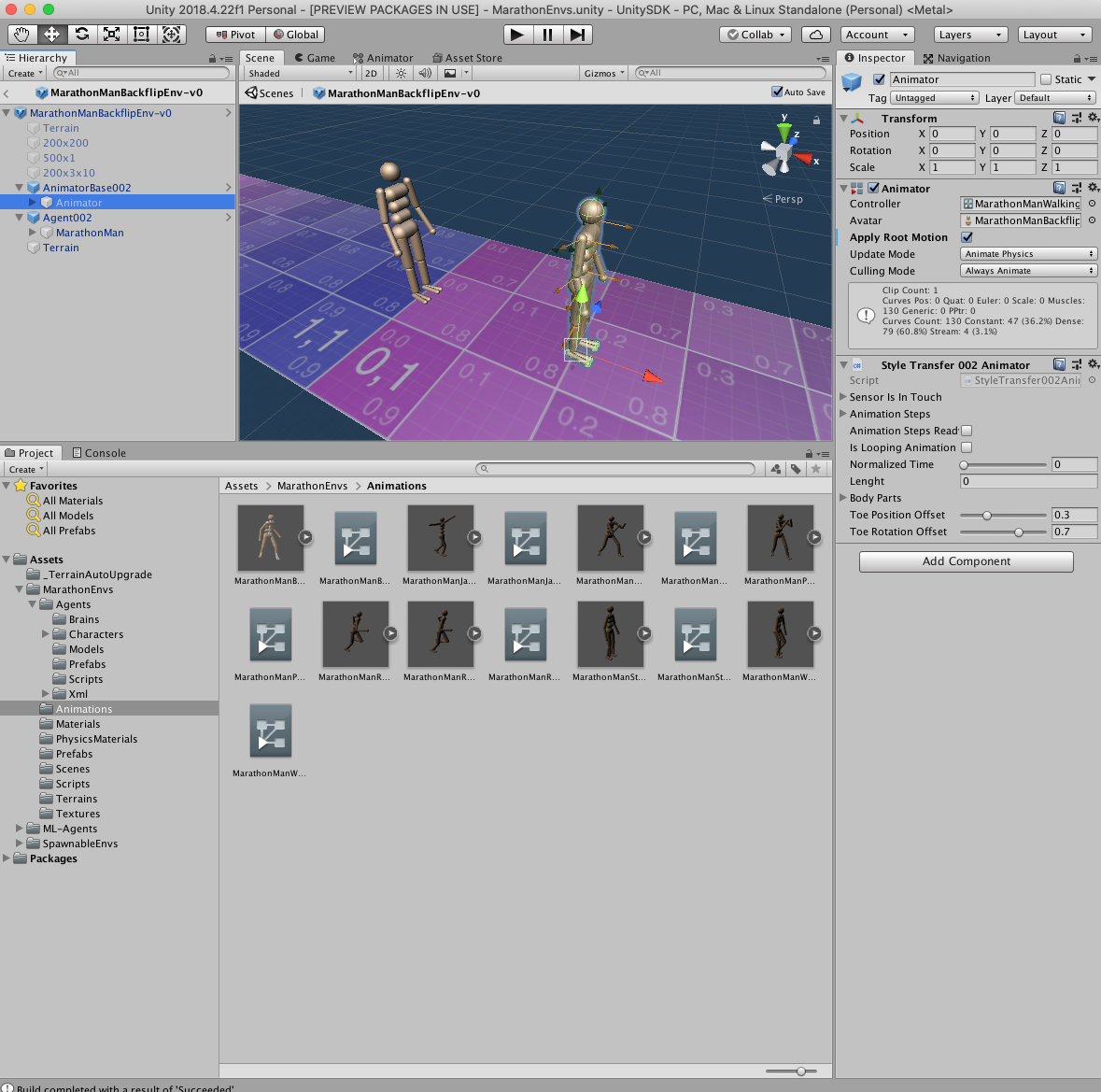
Change to your own reference action for training :
stay Unity Click inside Assets/MarathonEnvs/Environments/MarathonManBackflipEnv-v0.prefab, Then click on AnimatorBase002 Under the Animator, hold Animations Under folder controller Drag the file into the right border Controller in . Then don't build Good export .X86_64, Or choose scenes modify train_environments The number of ( Number of tracks ) stay Unity Training in the software .
next step : Add your own reference action .fbx And corresponding .controller Training , And study reinforcement learning .
2. edition 0.5:
marathon-envs v0.5
Corresponding instruction manual
2.1 To configure python Environmental Science
Corresponding 0.5 edition , After downloading, create python3.6 You can't 3.7 Environment , Under the local installation code directory mlagents==0.5.0, Then what is missing is loaded . Or first install it with official orders pip install mlagents==1.10.0 mlagents_envs==0.10.0, Then replace the main package mlagents( I don't know if it's feasible if I haven't tried ):
conda create -n marathon python=3.6
cd ml-agents
python setup.py install
2.2 To configure unity Environmental Science ( In the code above Unity SDK package )
unity API Interface and python API Interface correspondence , This is why you need to install locally mlagents package Why
unty edition (2018.2.14.f) To import from unity SDK Look at ,ubuntu The system starts from unity hub Download the corresponding version in , Click on Website You can jump unity hub download .
2.3 training
Just follow the manual for this part , Points out scene scene , Configure internal or external externel After weight , stay conda Run the following code in and return unity Start training in .
mlagents-learn config/marathon_envs_config.yaml --train --run-id=hopper001
2.4 appendix (0.5 edition python Environmental Science )
Package Version
-------------------- -------------------
absl-py 1.1.0
argon2-cffi 21.3.0
argon2-cffi-bindings 21.2.0
astor 0.8.1
async-generator 1.10
attrs 21.4.0
backcall 0.2.0
bleach 1.5.0
certifi 2016.9.26
cffi 1.15.0
cycler 0.11.0
dataclasses 0.8
decorator 5.1.1
defusedxml 0.7.1
docopt 0.6.2
entrypoints 0.4
gast 0.5.3
grpcio 1.11.1
html5lib 0.9999999
importlib-metadata 4.8.3
iniconfig 1.1.1
ipykernel 5.5.6
ipython 7.16.3
ipython-genutils 0.2.0
ipywidgets 7.7.0
jedi 0.17.2
Jinja2 3.0.3
jsonschema 4.0.0
jupyter 1.0.0
jupyter-client 7.1.2
jupyter-console 6.4.3
jupyter-core 4.9.2
jupyterlab-pygments 0.1.2
jupyterlab-widgets 1.1.0
kiwisolver 1.3.1
Markdown 3.3.7
MarkupSafe 2.0.1
matplotlib 3.0.0
mistune 0.8.4
mlagents 0.5.0
nbclient 0.5.9
nbconvert 6.0.7
nbformat 5.1.3
nest-asyncio 1.5.5
notebook 6.4.10
numpy 1.13.3
packaging 21.3
pandocfilters 1.5.0
parso 0.7.1
pexpect 4.8.0
pickleshare 0.7.5
Pillow 8.4.0
pip 21.2.4
pluggy 1.0.0
prometheus-client 0.14.1
prompt-toolkit 3.0.29
protobuf 3.6.1
ptyprocess 0.7.0
py 1.11.0
pycparser 2.21
Pygments 2.12.0
pyparsing 3.0.9
pyrsistent 0.18.0
pytest 7.1.2
python-dateutil 2.8.2
PyYAML 5.4.1
pyzmq 23.1.0
qtconsole 5.2.2
QtPy 2.0.1
Send2Trash 1.8.0
setuptools 49.6.0.post20210108
six 1.16.0
tensorboard 1.7.0
tensorflow 1.7.0
termcolor 1.1.0
terminado 0.13.0
testpath 0.6.0
tomli 1.2.3
tornado 6.1
traitlets 4.3.3
typing_extensions 4.1.1
wcwidth 0.2.5
Werkzeug 2.0.3
wheel 0.37.1
widgetsnbextension 3.6.0
zipp 3.6.0
3. Follow-up questions
1. I don't know how to call the reference action training set inside the program , I want to replace the reference action file by myself (.fbx) And modify the configuration parameters for intensive learning training .
2. The author's project structure is too large , It's a little difficult to understand deeply and there are too many versions , The code in each version is different , Just like the latest github Code in version , There is a special one inside animation The weight generated by the folder reference action is also .nn, In the old version, there are scenes with various actions , The reference action doesn't know where to put it, and the generated weight suffix is .bytes.
边栏推荐
- Ruffian Heng embedded bimonthly, issue 49
- LDAP Application Section (4) Jenkins Access
- Is it safe to open an account in Zheshang futures?
- The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
- China Light conveyor belt in-depth research and investment strategy report (2022 Edition)
- Trying to use is on a network resource that is unavailable
- 电脑清理,删除的系统文件
- JS inheritance method
- 【ROS】usb_ Cam camera calibration
- egg. JS project deployment online server
猜你喜欢
随机推荐
logback1.3. X configuration details and Practice
What is CSRF (Cross Site Request Forgery)?
China's high purity aluminum target market status and investment forecast report (2022 Edition)
LDAP应用篇(4)Jenkins接入
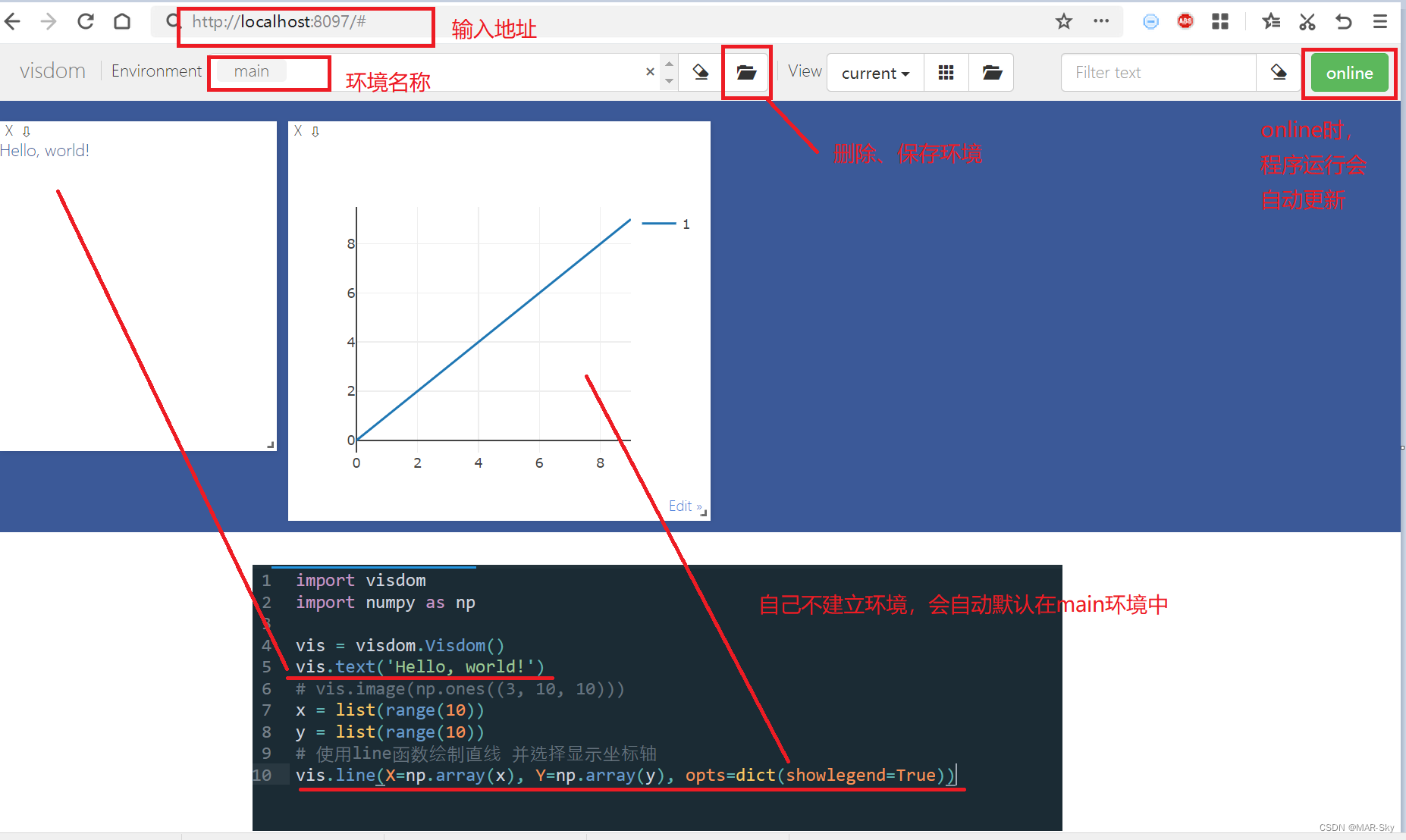
visdom可视化实现与检查介绍
Restful API design specification
sublime text中conda环境中plt.show无法弹出显示图片的问题
[NVIDIA development board] FAQ (updated from time to time)
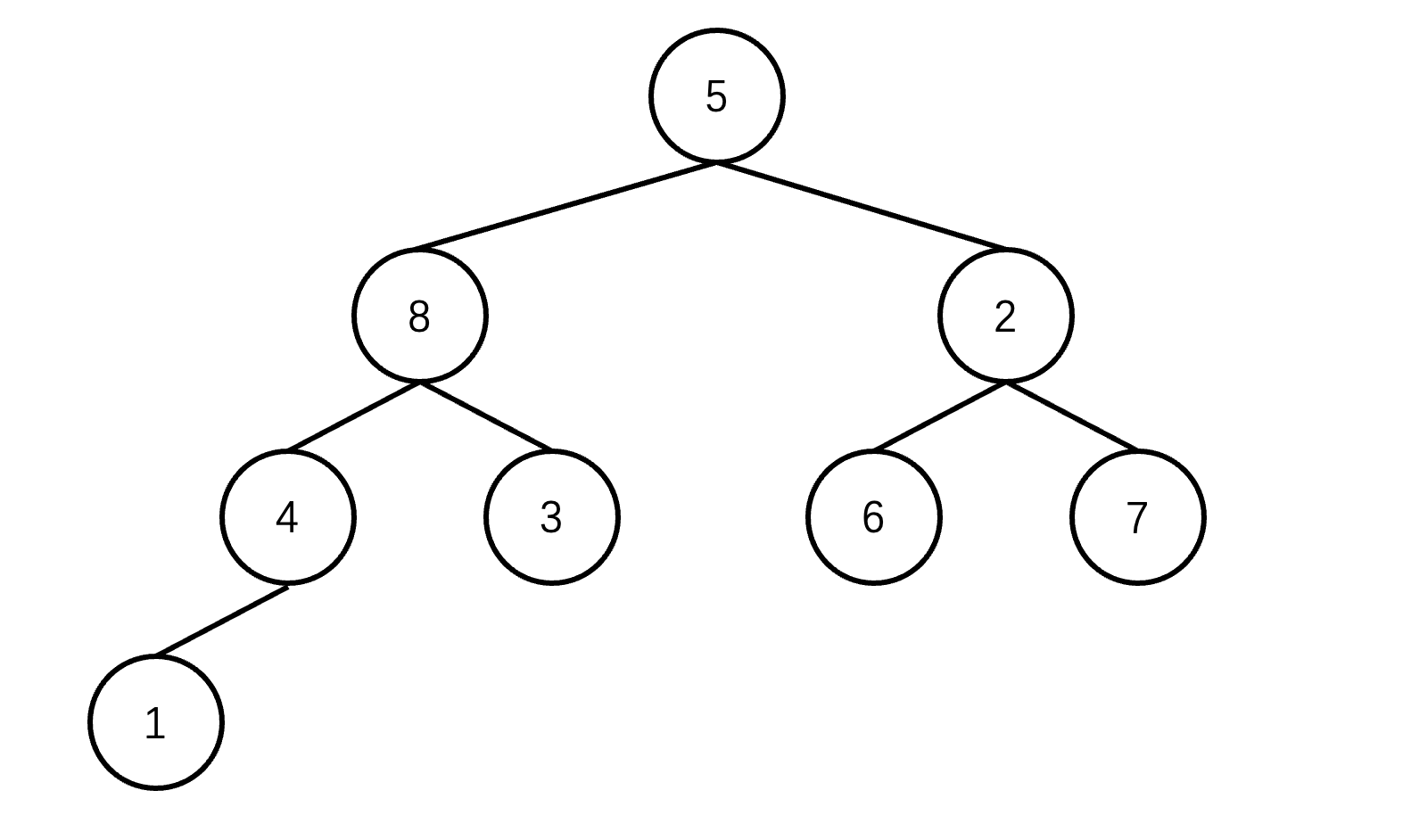
堆排序详解
Bottom up - physical layer
Fairguard game reinforcement: under the upsurge of game going to sea, game security is facing new challenges
Roguelike game into crack the hardest hit areas, how to break the bureau?
Introduction to the differences between compiler options of GCC dynamic library FPIC and FPIC
Cisp-pte practice explanation
LDAP應用篇(4)Jenkins接入
Synchronized solves problems caused by sharing
Precise query of tree tree
IoT -- 解读物联网四层架构
China dihydrolaurenol market forecast and investment strategy report (2022 Edition)
移位运算符