当前位置:网站首页>Integrated navigation: product description and interface description of zhonghaida inav2
Integrated navigation: product description and interface description of zhonghaida inav2
2022-07-07 02:00:00 【The moon shines on the silver sea like a dragon】
integrated navigation : Zhonghaida iNAV2 Product description and interface description
Product introduction
iNAV2 The vehicle integrated positioning module is a high-precision integrated real-time positioning and navigation module newly launched by China Haida .
The integrated positioning module is used for vehicle positioning and navigation , It is mainly used for passenger cars with automatic driving or intelligent driving function 、 Unmanned vehicle . The combined positioning module acts as the positioning sensor in the auto drive system , Provide centimeter level positioning and orientation data and attitude data for vehicles . Combine with high-precision map to realize automatic driving or intelligent assisted driving .
The combined positioning module supports positioning and orientation , Built in inertial sensor supports attitude output . And vehicle wheel speed and other information fusion , In none GNSS In the case of signal, a certain high-precision positioning time can be maintained .
The object looks like this :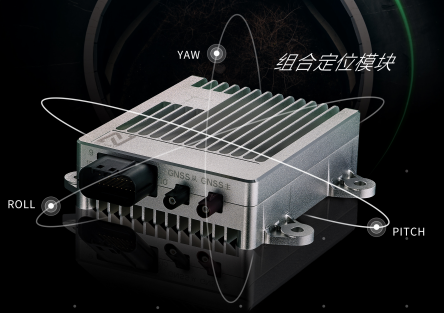
Interface description
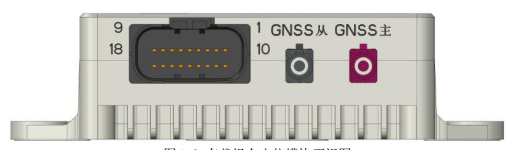
The above figure shows the front view of the vehicle mounted combined positioning module , In the figure 18pin The interface of is the peripheral serial port wiring entry , Be marked with “GNSS Lord ” and “GNSS from ” Of FAKRA The connectors are the main antenna and auxiliary antenna interfaces of the motherboard .
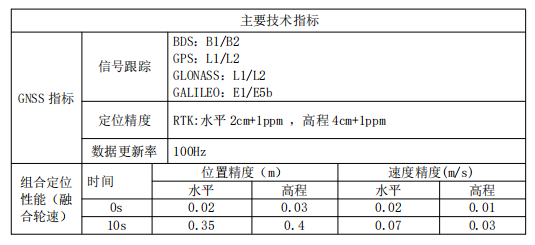
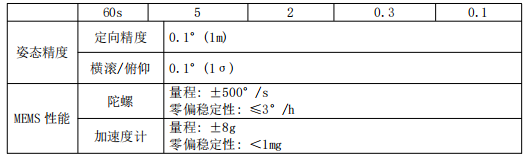
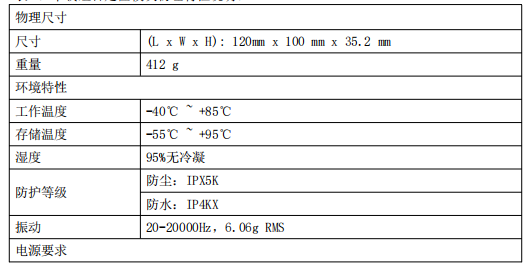
Technical parameters
Main technical indicators
Electrical and physical characteristics
The appearance and installation dimensions of the combined module are shown in the figure below :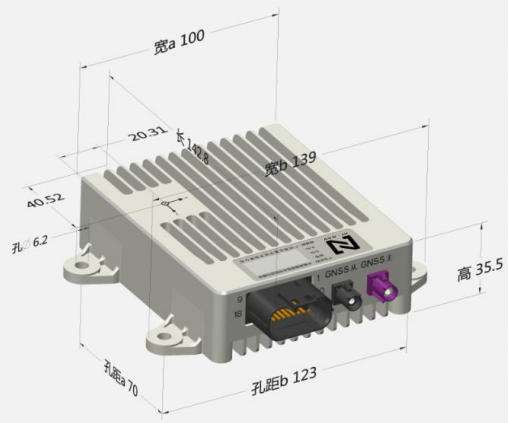
I/O Pin description
18Pin The front view of the double row male head is shown below :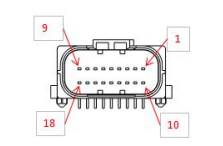
Vehicle mounted combined positioning module I/0 Pin description :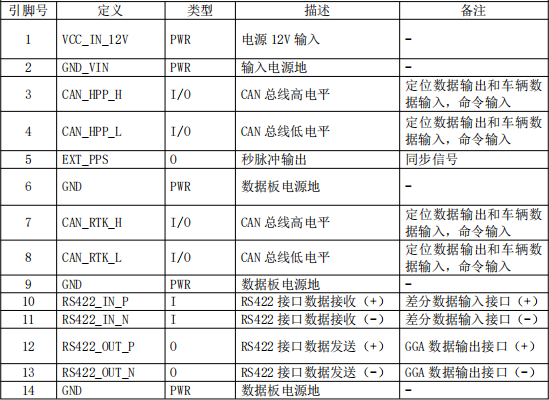

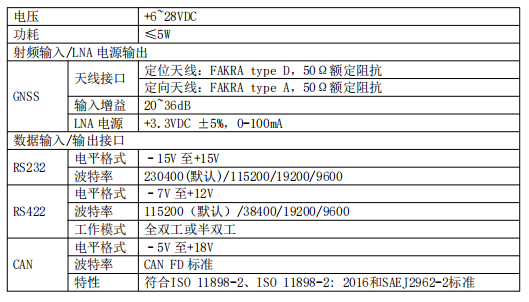
Data interface
The vehicle mounted integrated positioning module provides RS232 Standard data interface 、RS422 Standard data interface 、CAN The specific description of the interface is as follows
RS232 Interface
RS232 Interface specification :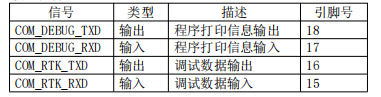
The combination module provides two RS232 Interface . Namely COM-RTK and COM-DEBUG, Two RS232 Interface character Up to standard EIA-RS232 level , Input voltage range -15V DC ~ +15V DC. The baud rate that can be set is 230400/115200/19200/9600.COM-RTK The interface is used to locate the data output 、 Command input and firmware upgrade , The default baud rate is 230400.COM-DEBUG Used to output program print information , The default baud rate is 115200.
RS422 Interface
RS422 Interface specification :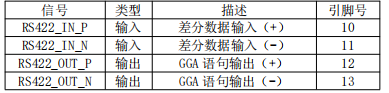
RS422 The interface supports full duplex mode , The baud rate that can be set is 115200( Default )/38400/19200/9600. RS422 The interface is used to receive differential data , At the same time output 1Hz Of GGA The data is used to report the heartbeat to the differential data server .
CAN Interface
CAN Interface specification :
The combined positioning module provides two standards CAN Interface , The baud rate can reach 5Mbps.CAN-HPP For transportation Enter vehicle data such as wheel speed and gear data ,CAN-RTK Used to output positioning data or MEMS Sensor data , Also used On CAN Configuration management parameters of upper computer 、 Calibration management parameters and firmware upgrade function .
PPS Second pulse
The on-board integrated positioning module provides an output 1 second / Sub pulse function pin PPS. The system is not locked in front of the star PPS The second pulse signal is only for reference , Output standard after star locking 1Hz Pulse signal , The default pulse width is 1ms High level .PPS The accuracy of second pulse is 20ns RMS. The signal level VOL<0.4V,VOH>2.8V . This signal can be used for data time synchronization .
Pin PPS explain :
The signal output is shown in the figure below :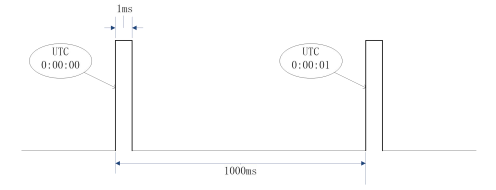
边栏推荐
- ROS learning (XX) robot slam function package -- installation and testing of rgbdslam
- 字符串转成日期对象
- Recognition of C language array
- Shortcut keys commonly used in idea
- Batch delete data in SQL - set in entity
- Shell script quickly counts the number of lines of project code
- Flir Blackfly S 工业相机:自动曝光配置及代码
- Treadpoolconfig thread pool configuration in real projects
- grep查找进程时,忽略grep进程本身
- JS ES5也可以创建常量?
猜你喜欢
Gin introduction practice

Flir Blackfly S工业相机:颜色校正讲解及配置与代码设置方法
ROS学习(23)action通信机制
ROS学习(21)机器人SLAM功能包——orbslam的安装与测试
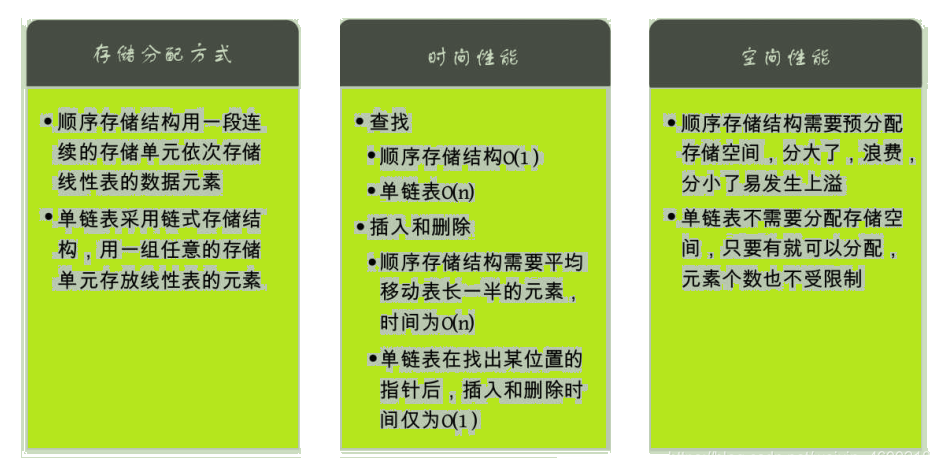
【唯一】的“万字配图“ | 讲透【链式存储结构】是什么?
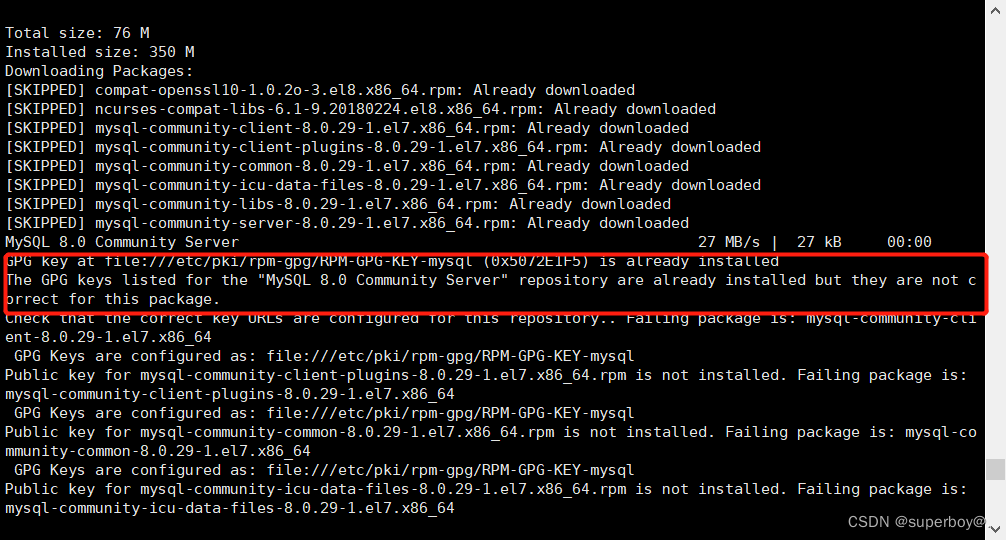
The GPG keys listed for the "MySQL 8.0 community server" repository are already ins
刨析《C语言》【进阶】付费知识【一】

454-百度面经1
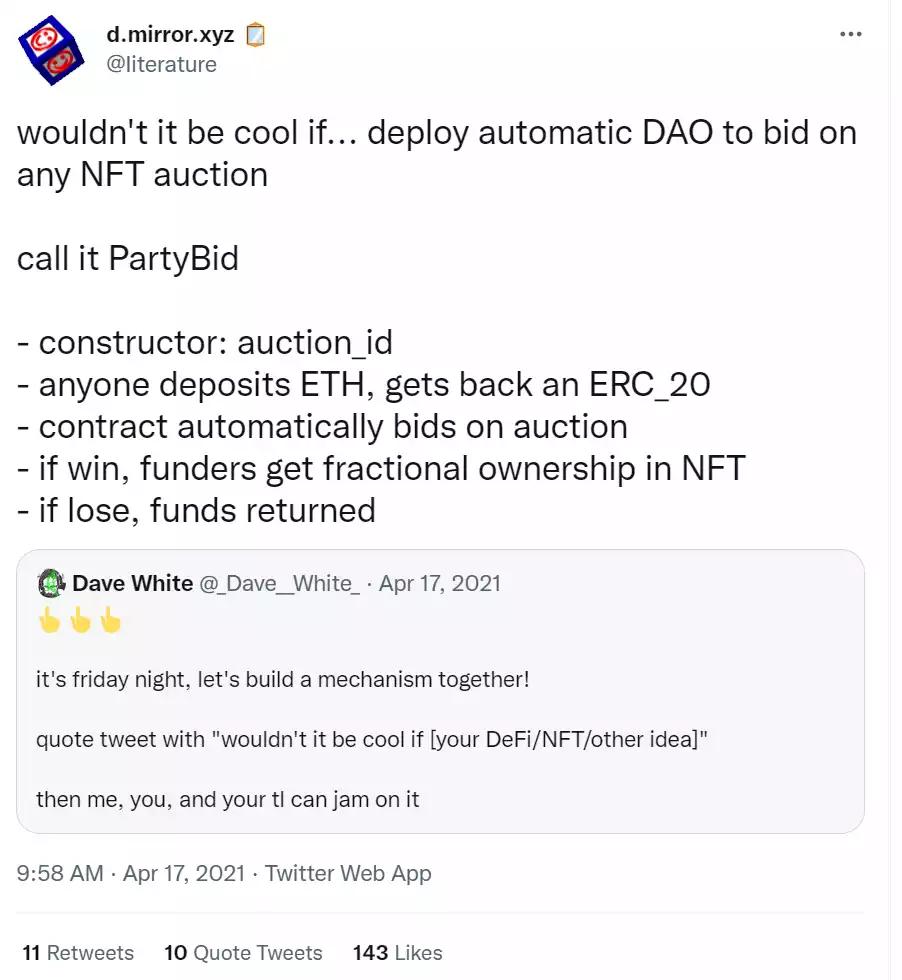
PartyDAO如何在1年内把一篇推文变成了2亿美金的产品DAO
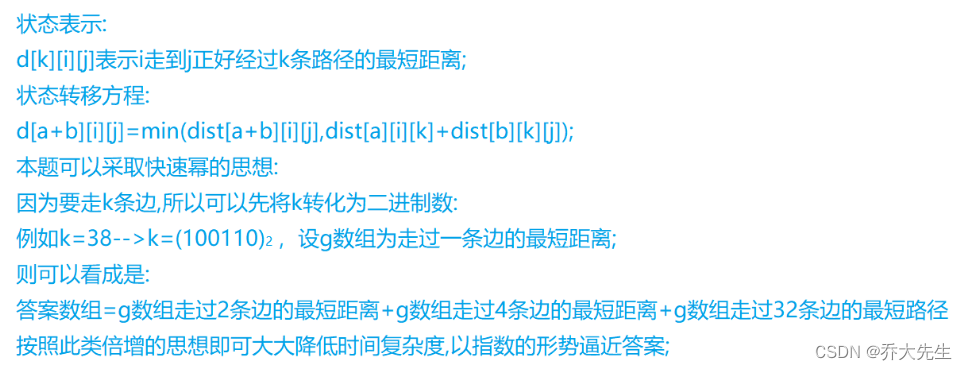
AcWing 345. 牛站 题解(floyd的性质、倍增)
随机推荐
Gin 入门实战
POJ 3177 redundant paths POJ 3352 road construction (dual connection)
AcWing 1142. Busy urban problem solving (minimum spanning tree)
Treadpoolconfig thread pool configuration in real projects
When grep looks for a process, it ignores the grep process itself
AcWing 346. Solution to the problem of water splashing festival in the corridor (deduction formula, minimum spanning tree)
一片叶子两三万?植物消费爆火背后的“阳谋”
鼠标右键 自定义
Basic introduction and use of dvajs
mysqlbackup 还原特定的表
ROS学习(24)plugin插件
ROS学习(22)TF变换
字符串转成日期对象
ZOJ Problem Set – 2563 Long Dominoes 【如压力dp】
Telnet,SSH1,SSH2,Telnet/SSL,Rlogin,Serial,TAPI,RAW
ROS learning (26) dynamic parameter configuration
ROS learning (25) rviz plugin
[unique] what is the [chain storage structure]?
AcWing 1141. 局域网 题解(kruskalkruskal 求最小生成树)
我如何编码8个小时而不会感到疲倦。