当前位置:网站首页>Halcon实例转OpenCvSharp(C# OpenCV)实现--瓶口缺陷检测(附源码)
Halcon实例转OpenCvSharp(C# OpenCV)实现--瓶口缺陷检测(附源码)
2022-07-06 18:38:00 【Color Space】

本文作者Color Space,文章未经作者允许禁止转载!
导读
本文主要介绍如何使用OpenCvSharp实现瓶口缺陷检测实例。效果如下:
OpenCV瓶嘴缺陷检测实现展示 (Halcon实例转换OpenCV)
背景介绍
实例来源于Halcon例程inspect_bottle_mouth.hdev,具体演示和效果可以查看下面链接:
边栏推荐
- 企业中台建设新路径——低代码平台
- Recognition of C language array
- 一片叶子两三万?植物消费爆火背后的“阳谋”
- ROS learning (25) rviz plugin
- 2022/0524/bookstrap
- Tiflash source code reading (IV) design and implementation analysis of tiflash DDL module
- Flir Blackfly S 工业相机:通过外部触发实现多摄像头同步拍摄
- 【服务器数据恢复】raid损坏导致戴尔某型号服务器崩溃的数据恢复案例
- How did partydao turn a tweet into a $200million product Dao in one year
- centos8 用yum 安装MySQL 8.0.x
猜你喜欢
The mega version model of dall-e MINI has been released and is open for download
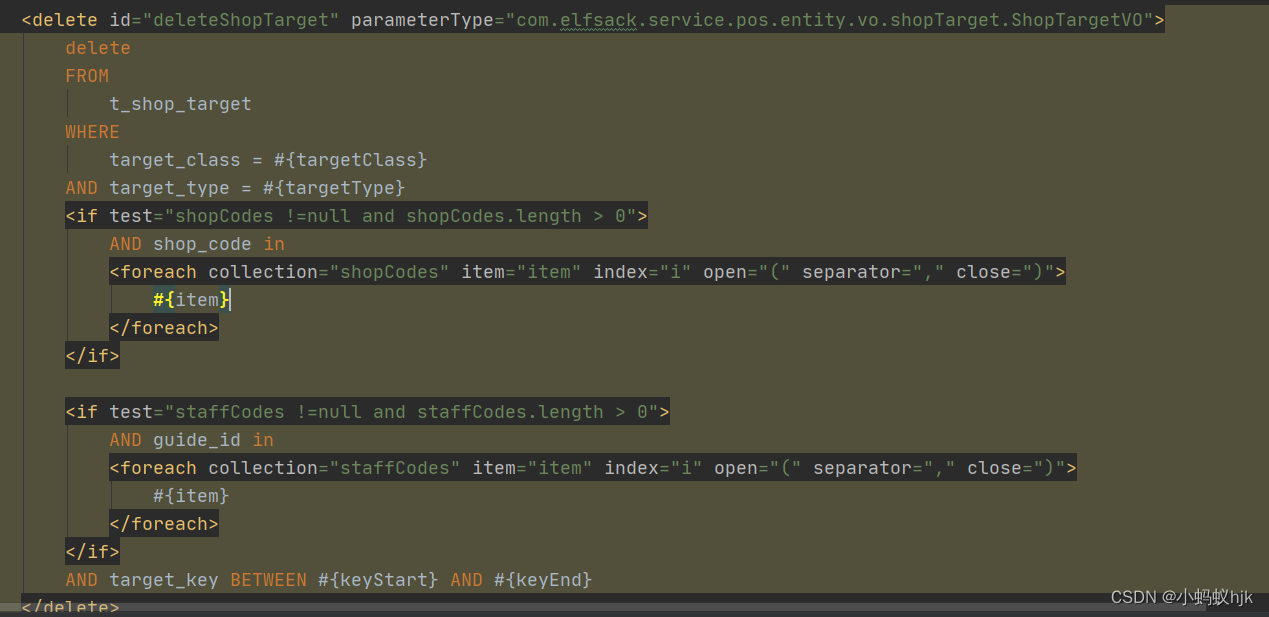
Batch delete data in SQL - set in entity

Flir Blackfly S 工业相机:自动曝光配置及代码
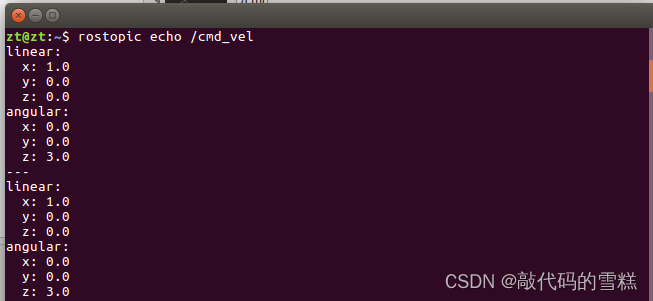
ROS学习(25)rviz plugin插件
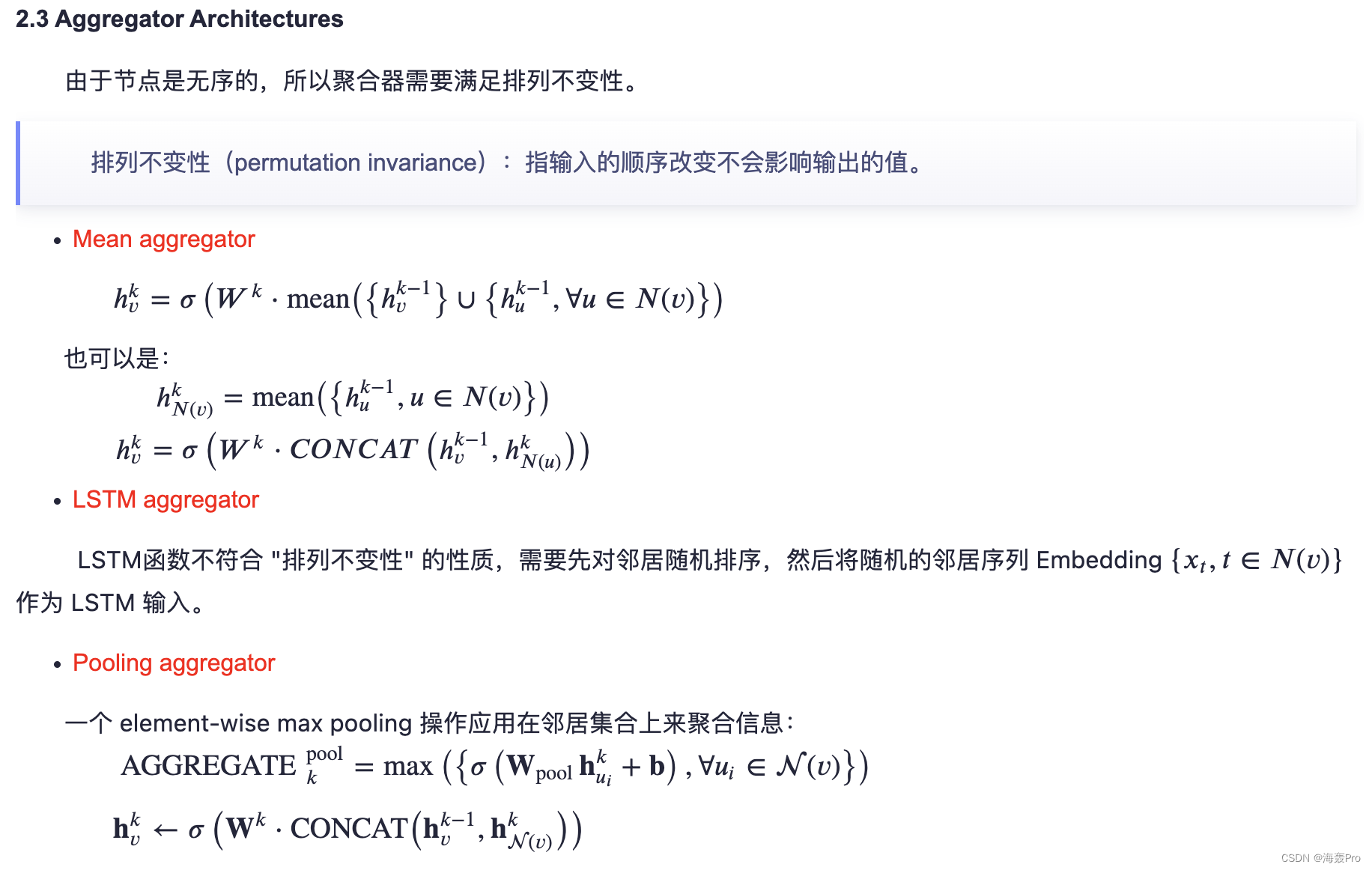
【论文阅读|深读】 GraphSAGE:Inductive Representation Learning on Large Graphs
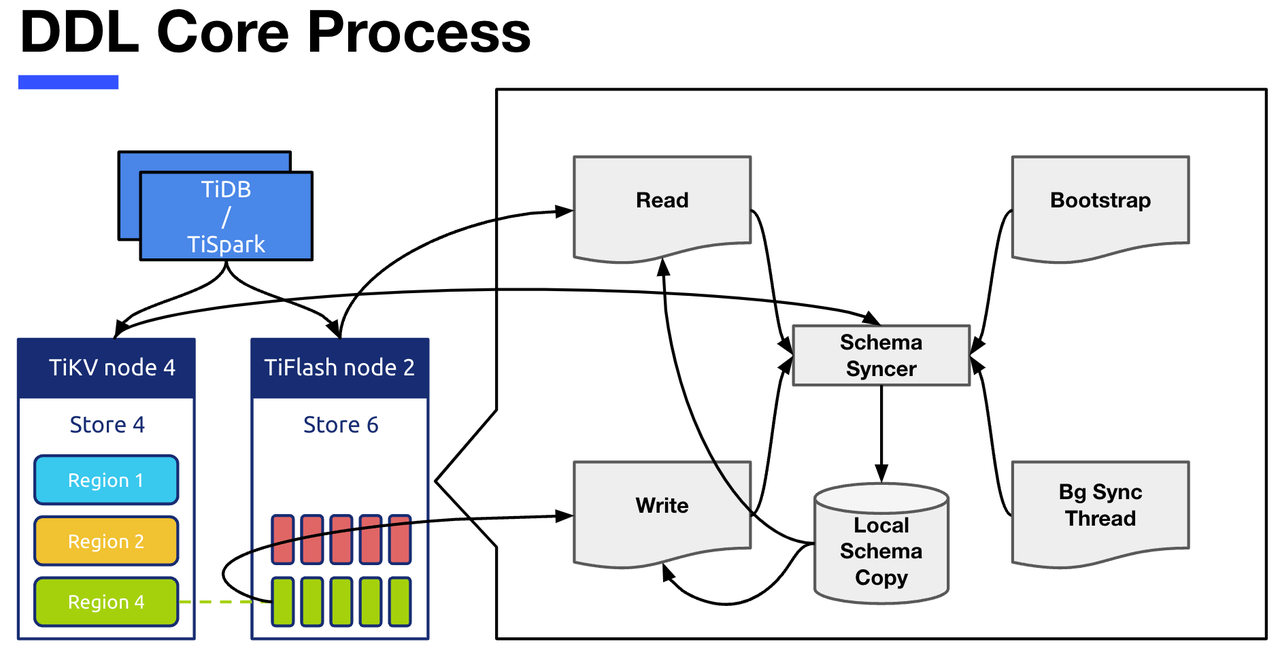
TiFlash 源码阅读(四)TiFlash DDL 模块设计及实现分析
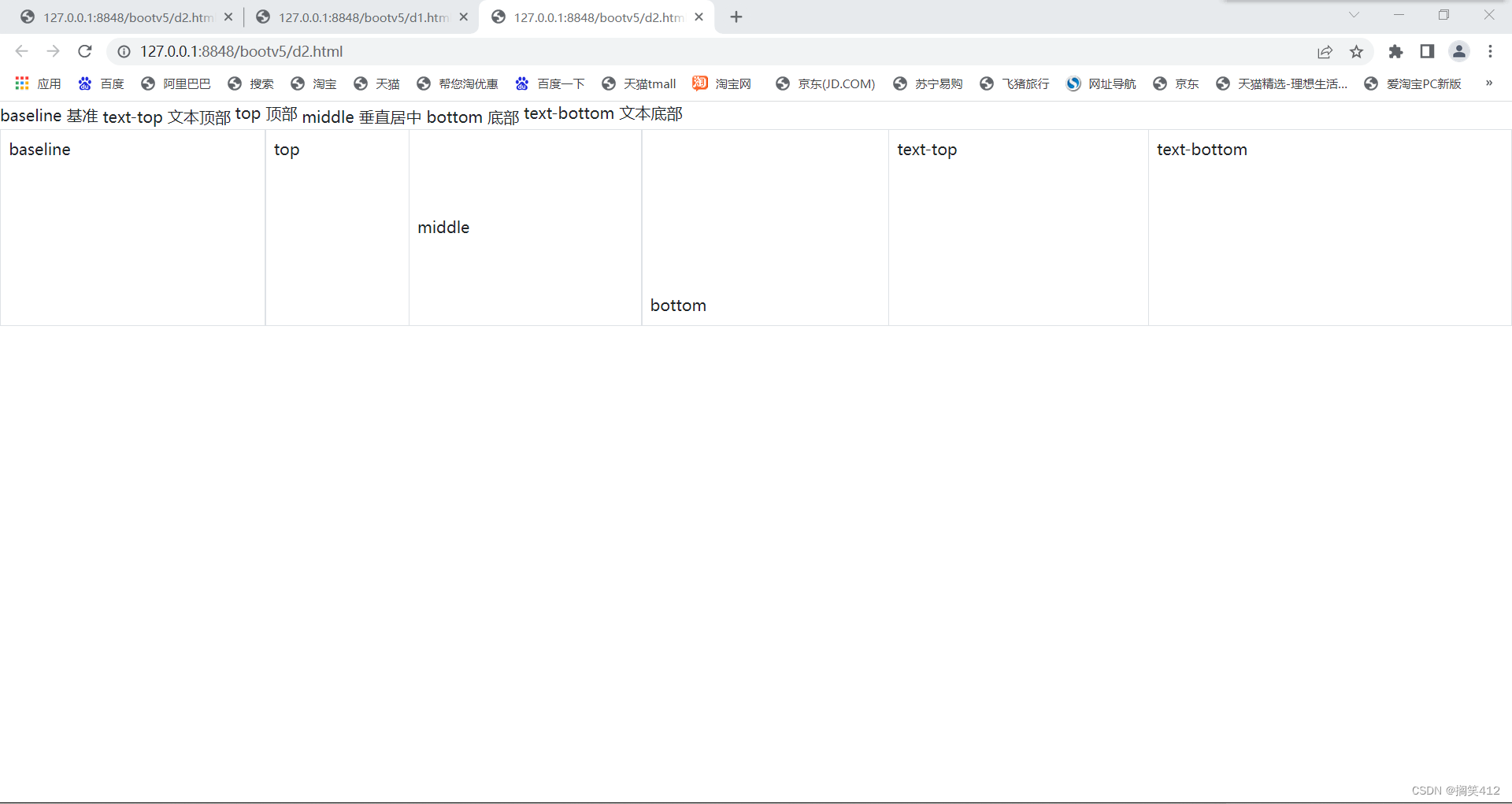
2022/0524/bookstrap

A new path for enterprise mid Platform Construction -- low code platform

猿桌派第三季开播在即,打开出海浪潮下的开发者新视野

Big guys gather | nextarch foundation cloud development meetup is coming!
随机推荐
Zhang Ping'an: accelerate cloud digital innovation and jointly build an industrial smart ecosystem
go swagger使用
SchedulX V1.4.0及SaaS版发布,免费体验降本增效高级功能!
The mega version model of dall-e MINI has been released and is open for download
Integrated navigation: product description and interface description of zhonghaida inav2
New generation cloud native message queue (I)
Golang foundation - data type
大咖云集|NextArch基金会云开发Meetup来啦!
【论文阅读|深读】 GraphSAGE:Inductive Representation Learning on Large Graphs
BigDecimal 的正确使用方式
FLIR blackfly s industrial camera: configure multiple cameras for synchronous shooting
Cisp-pte practice explanation (II)
MySQL execution process and sequence
ROS学习(22)TF变换
Modify the system time of Px4 flight control
Flir Blackfly S 工业相机:配置多个摄像头进行同步拍摄
【论文阅读|深读】DNGR:Deep Neural Networks for Learning Graph Representations
Threadlocalutils (tool class IV)
最近小程序开发记录
Centos8 install MySQL 8.0 using yum x