当前位置:网站首页>施努卡:机器人视觉抓取工作原理 机器视觉抓取
施努卡:机器人视觉抓取工作原理 机器视觉抓取
2022-07-07 08:20:00 【施努卡机器视觉】
施努卡:总装车间自动分拣物料,工厂物料自动分拣
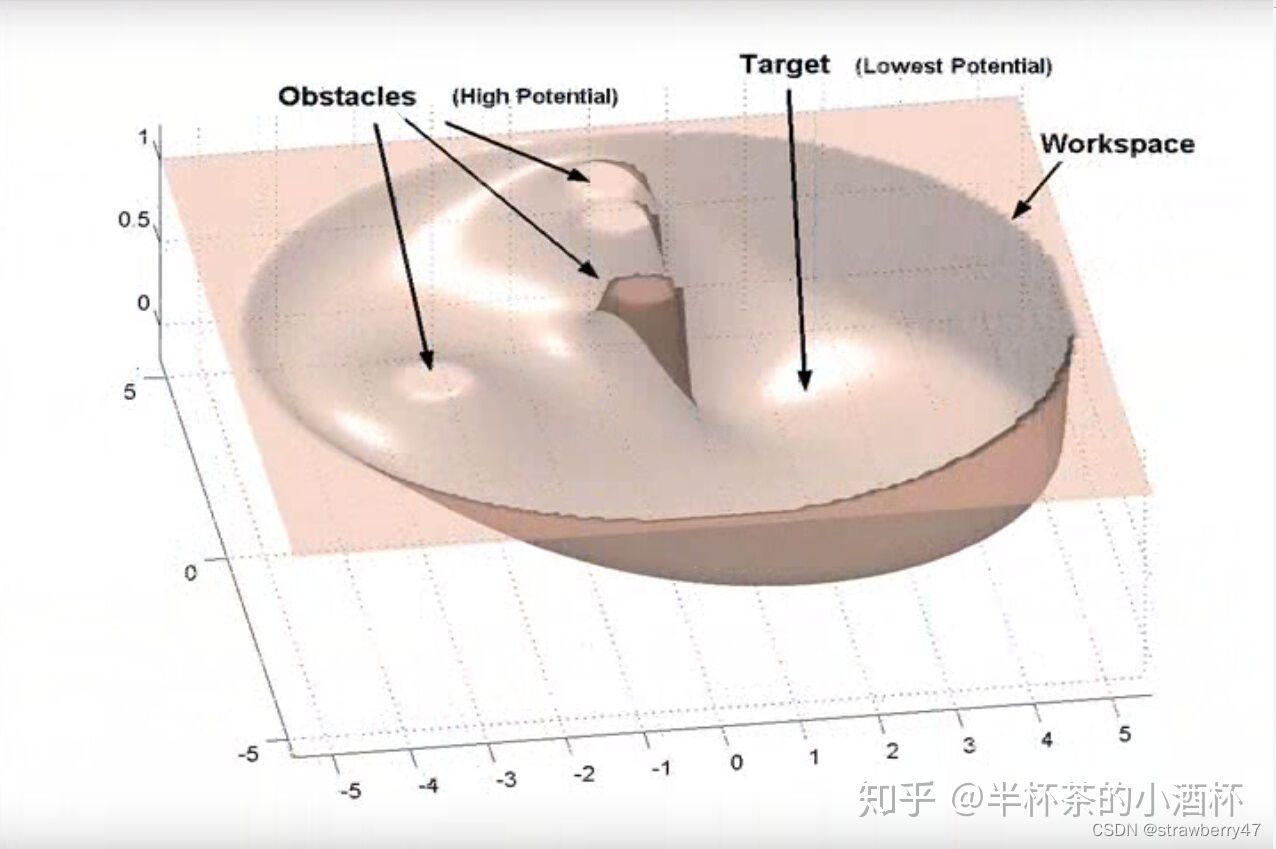
机器人视觉硬件主要包括图像获取和视觉处理两部分,而图像获取由照明系统、视觉传感器、模拟-数字转换器和帧存储器等组成。机器人视觉通过视觉传感器获取环境的二维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置。
边栏推荐
- C#记录日志方法
- Postman interface test VII
- Fiddler break point
- 大整数类实现阶乘
- Download Text, pictures and ab packages used by unitywebrequest Foundation
- LeetCode 练习——113. 路径总和 II
- SQLyog数据库怎么取消自动保存更改
- @Configuration, use, principle and precautions of transmission:
- 5个chrome简单实用的日常开发功能详解,赶快解锁让你提升更多效率!
- 每周推荐短视频:L2级有哪些我们日常中经常会用到的功能?
猜你喜欢
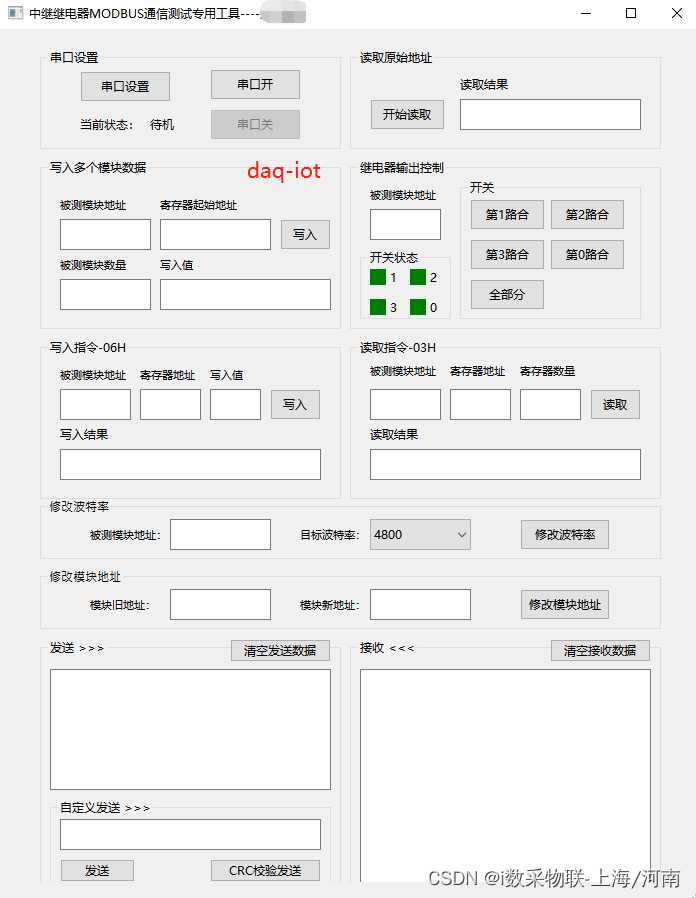
Serial communication relay Modbus communication host computer debugging software tool project development case
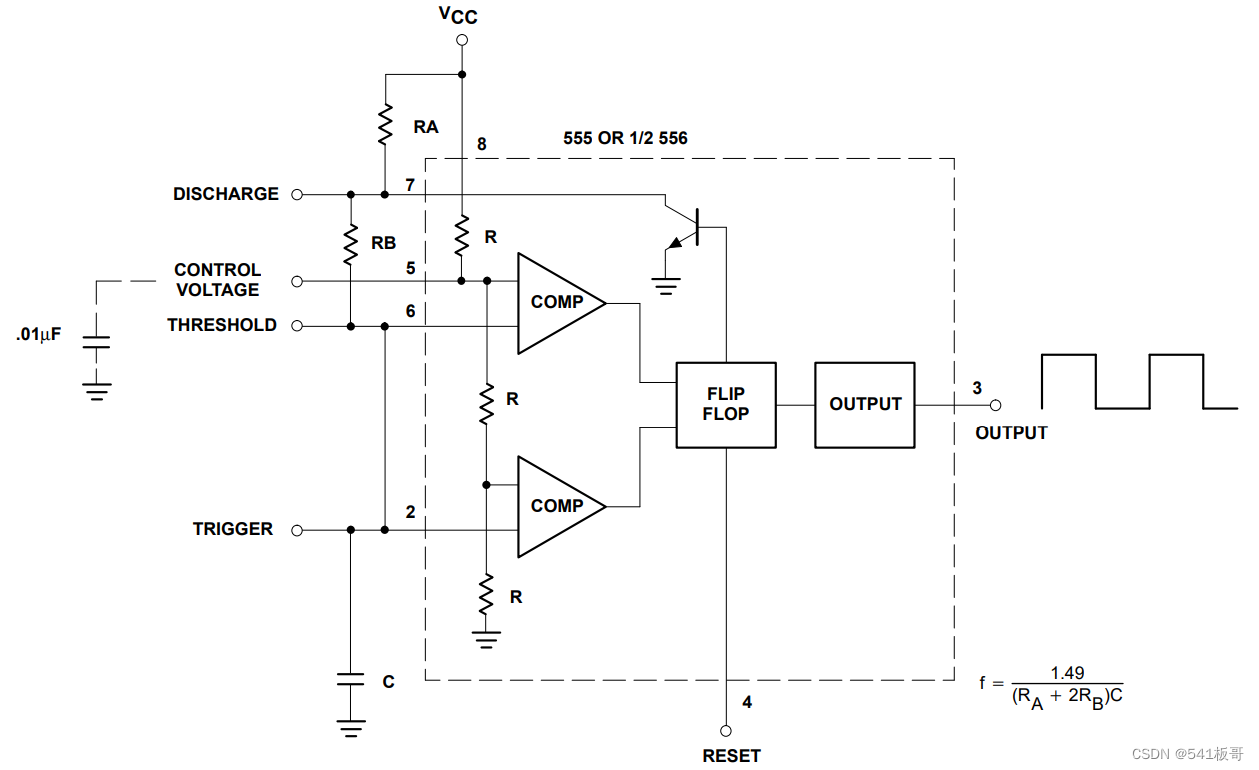
555电路详解
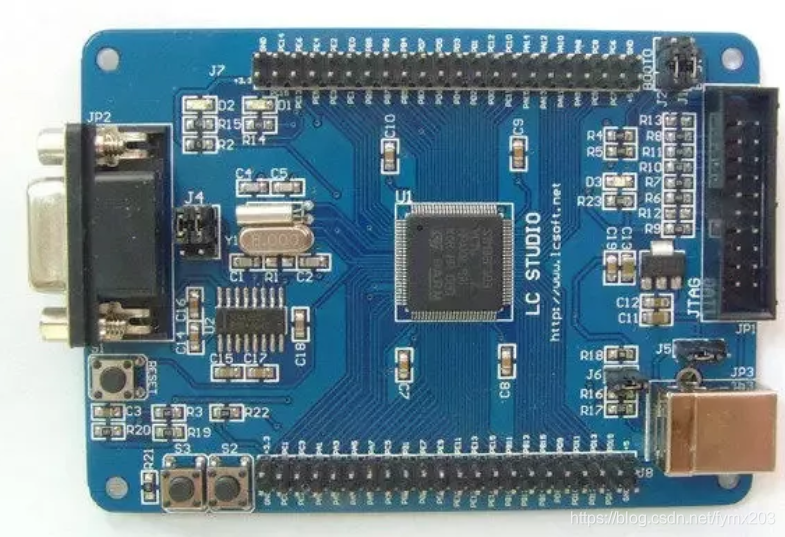
This article explains the complex relationship between MCU, arm, muc, DSP, FPGA and embedded system

JMeter installation

LLVM之父Chris Lattner:為什麼我們要重建AI基礎設施軟件
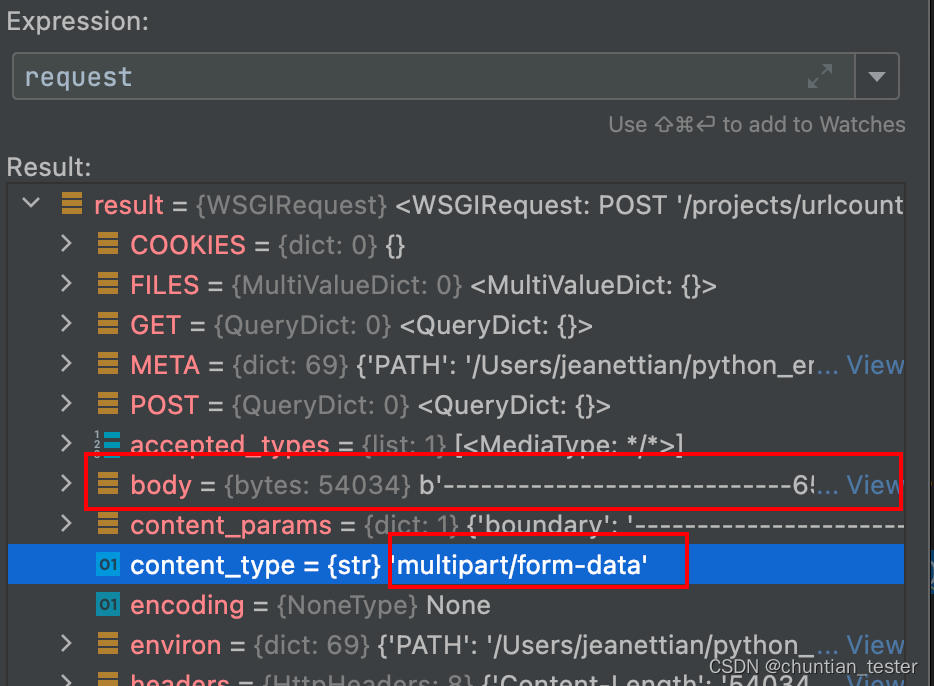
The request object parses the request body and request header parameters
Trajectory planning for multi-robot systems: Methods and applications 综述阅读笔记

【acwing】786. 第k个数
Fiddler simulates the interface test
0x0fa23729 (vcruntime140d.dll) (in classes and objects - encapsulation.Exe) exception thrown (resolved)
随机推荐
柏拉图和他的三个弟子的故事:如何寻找幸福?如何寻找理想伴侣?
@Configuration, use, principle and precautions of transmission:
Why is the reflection efficiency low?
【STM32】STM32烧录程序后SWD无法识别器件的问题解决方法
[learning notes - Li Hongyi] Gan (generation of confrontation network) full series (I)
P1223 排队接水/1319:【例6.1】排队接水
OpenGL glLightfv 函数的应用以及光源的相关知识
Learning records - high precision addition and multiplication
学习记录——高精度加法和乘法
Study summary of postgraduate entrance examination in September
Use of JSON extractor originals in JMeter
对存储过程进行加密和解密(SQL 2008/SQL 2012)
STM32 ADC and DMA
Fiddler break point
STM32中AHB总线_APB2总线_APB1总线这些是什么
SQLyog数据库怎么取消自动保存更改
High number_ Chapter 1 space analytic geometry and vector algebra_ Quantity product of vectors
Appx代码签名指南
字符串格式化
Word自动生成目录的方法